防爆智能视觉导航系统的制作方法
1.本发明涉及导航系统技术领域,具体为一种防爆智能视觉导航系统。
背景技术:
2.防爆智能视觉导航系统在自动驾驶、自主导航,自主规划,工业控制等领域提供高精度定位,拥有广泛领域的专业技术,但防爆智能视觉导航系统一般不具备获取设备姿态数据的获取,仅仅通过设备的定位对设备进行导航,这样由于未考虑到设备姿态对其移动过程中导航精度的影响,很容易对设备移动运行造成事故风险。为此我们提出一种防爆智能视觉导航系统。
技术实现要素:
3.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种防爆智能视觉导航系统。
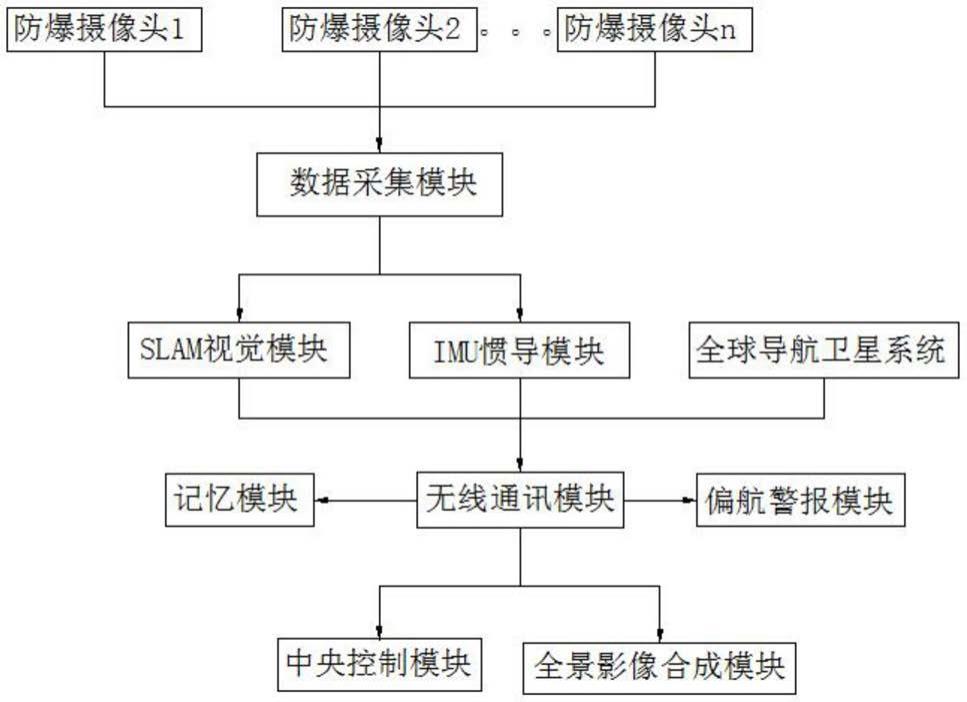
4.为实现上述目的,本发明提供如下技术方案:一种防爆智能视觉导航系统,包括安装在设备四周的若干组防爆摄像头以及安装在设备内的全球导航卫星系统,所述防爆摄像头的输出端连接于数据采集模块的输入端,所述数据采集模块的输出端分别连接于slma视觉模块和imu惯导模块的输入端,所述全球导航卫星系统、slma视觉模块和imu惯导模块的输出端均连接于无线通讯模块的输入端,所述无线通讯模块的输出端分别连接于记忆模块、偏航警报模块、中央控制模块和全景影像合成模块的输入端。
5.优选的,所述全球导航卫星系统为北斗导航系统或者gps导航系统,若干组所述防爆摄像头之间为等距设置。
6.优选的,所述设备包括自动驾驶汽车或者需要高精度定位的移动设备,所述设备上还设有传感器,该传感器包括超声波探头、安全避障雷达、光电传感器、激光测距和避障传感器。
7.优选的,所述中央控制模块和全景影像合成模块均安装在设备内,且中央控制模块用于调节设备运行的姿态,所述全景影像合成模块用于将设备周围的环境集成为实时全景影像,并通过设备内集成的显示屏显示出来。
8.优选的,所述slam视觉模块用于用于获取设备位置图像;imu惯导模块用于自动采集设备位置参数信息。
9.优选的,所述记忆模块用于存储全球导航卫星系统、slma视觉模块和imu惯导模块采集到的数据,所述偏航警报模块用于在全球导航卫星系统、slma视觉模块和imu惯导模块采集的数据具有差异,导致无法整合成更精确的位置信息时,发出报警,并紧急停止设备的移动。
10.与现有技术相比,本发明的有益效果是:全景影像合成模块用于将设备周围的环境通过slma视觉模块和imu惯导模块采集的数据整合为实时全景影像,并通过设备内集成的显示屏显示出来,实时全景影像用于辅助设备的安全移动;通过中央控制模块将全球导
航卫星系统、slma视觉模块和imu惯导模块采集的数据进行整合,整合出设备的位置以及姿态数据,再通过中央控制模块调节设备运行的姿态,确保设备的安全移动。
附图说明
11.图1为本发明系统示意图。
具体实施方式
12.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
13.请参阅图1,本发明提供一种技术方案:一种防爆智能视觉导航系统,包括安装在设备四周的若干组防爆摄像头以及安装在设备内的全球导航卫星系统,所述防爆摄像头的输出端连接于数据采集模块的输入端,所述数据采集模块的输出端分别连接于slma视觉模块和imu惯导模块的输入端,所述全球导航卫星系统、slma视觉模块和imu惯导模块的输出端均连接于无线通讯模块的输入端,所述无线通讯模块的输出端分别连接于记忆模块、偏航警报模块、中央控制模块和全景影像合成模块的输入端。
14.具体的,所述全球导航卫星系统为北斗导航系统或者gps导航系统,若干组所述防爆摄像头之间为等距设置。
15.具体的,所述设备包括自动驾驶汽车或者需要高精度定位的移动设备,所述设备上还设有传感器,该传感器包括超声波探头、安全避障雷达、光电传感器、激光测距和避障传感器。
16.具体的,所述中央控制模块和全景影像合成模块均安装在设备内,且中央控制模块用于调节设备运行的姿态,所述全景影像合成模块用于将设备周围的环境集成为实时全景影像,并通过设备内集成的显示屏显示出来。
17.具体的,所述slam视觉模块用于用于获取设备位置图像;imu惯导模块用于自动采集设备位置参数信息。
18.具体的,所述记忆模块用于存储全球导航卫星系统、slma视觉模块和imu惯导模块采集到的数据,所述偏航警报模块用于在全球导航卫星系统、slma视觉模块和imu惯导模块采集的数据具有差异,导致无法整合成更精确的位置信息时,发出报警,并紧急停止设备的移动。
19.具体实施时的工作原理为,防爆摄像头采集设备四周的影像,然后通过数据采集模块进行采集,随后传递至slma视觉模块和imu惯导模块,slam视觉模块用于用于获取设备位置图像;imu惯导模块用于自动采集设备位置参数信息;全球导航卫星系统用于获取设备的位置信息;
20.全景影像合成模块用于将设备周围的环境通过slma视觉模块和imu惯导模块采集的数据整合为实时全景影像,并通过设备内集成的显示屏显示出来,实时全景影像用于辅助设备的安全移动;通过中央控制模块将全球导航卫星系统、slma视觉模块和imu惯导模块采集的数据进行整合,整合出设备的位置以及姿态数据,再通过中央控制模块调节设备运
行的姿态,确保设备的安全移动。
21.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
技术特征:
1.一种防爆智能视觉导航系统,包括安装在设备四周的若干组防爆摄像头以及安装在设备内的全球导航卫星系统,其特征在于:所述防爆摄像头的输出端连接于数据采集模块的输入端,所述数据采集模块的输出端分别连接于slma视觉模块和imu惯导模块的输入端,所述全球导航卫星系统、slma视觉模块和imu惯导模块的输出端均连接于无线通讯模块的输入端,所述无线通讯模块的输出端分别连接于记忆模块、偏航警报模块、中央控制模块和全景影像合成模块的输入端。2.根据权利要求1所述的一种防爆智能视觉导航系统,其特征在于:所述全球导航卫星系统为北斗导航系统或者gps导航系统,若干组所述防爆摄像头之间为等距设置。3.根据权利要求1所述的一种防爆智能视觉导航系统,其特征在于:所述设备包括自动驾驶汽车或者需要高精度定位的移动设备,所述设备上还设有传感器,该传感器包括超声波探头、安全避障雷达、光电传感器、激光测距和避障传感器。4.根据权利要求1所述的一种防爆智能视觉导航系统,其特征在于:所述中央控制模块和全景影像合成模块均安装在设备内,且中央控制模块用于调节设备运行的姿态,所述全景影像合成模块用于将设备周围的环境集成为实时全景影像,并通过设备内集成的显示屏显示出来。5.根据权利要求1所述的一种防爆智能视觉导航系统,其特征在于:所述slam视觉模块用于用于获取设备位置图像;imu惯导模块用于自动采集设备位置参数信息。6.根据权利要求1所述的一种防爆智能视觉导航系统,其特征在于:所述记忆模块用于存储全球导航卫星系统、slma视觉模块和imu惯导模块采集到的数据,所述偏航警报模块用于在全球导航卫星系统、slma视觉模块和imu惯导模块采集的数据具有差异,导致无法整合成更精确的位置信息时,发出报警,并紧急停止设备的移动。
技术总结
本发明公开了一种防爆智能视觉导航系统,包括安装在设备四周的若干组防爆摄像头以及安装在设备内的全球导航卫星系统,所述防爆摄像头的输出端连接于数据采集模块的输入端,所述数据采集模块的输出端分别连接于SLMA视觉模块和IMU惯导模块的输入端,所述全球导航卫星系统、SLMA视觉模块和IMU惯导模块的输出端均连接于无线通讯模块的输入端,所述无线通讯模块的输出端分别连接于记忆模块、偏航警报模块、中央控制模块和全景影像合成模块的输入端。本发明可获取实时全景影像,用于辅助设备的安全移动;可获取设备的位置以及姿态数据,再通过中央控制模块调节设备运行的姿态,确保设备的安全移动。设备的安全移动。
技术研发人员:黄苑铭
受保护的技术使用者:深圳壹赛联防爆智能科技有限公司
技术研发日:2020.11.12
技术公布日:2022/5/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1