360度太赫兹时域光谱系统高精度透反射调节平台的制作方法
:
[0001]
本发明属于太赫兹光谱和成像技术领域,具体涉及一种360度太赫兹时域光谱系统高精度透反射调节平台。
背景技术:
:
[0002]
基于光电导天线的太赫兹时域光谱系统(简称tds)是当前最为成熟的太赫兹光谱产品。其基本原理为:光纤飞秒激光器发出两束飞秒激光,一束作为泵浦光,经光纤传输到光电导发射天线上,在偏置电压的作用下产生宽带太赫兹波,该太赫兹波经透射或反射等方式携带测试样品的信息进入太赫兹探测天线(即发射光路);另一束作为探测光,经过光学延迟线,进入太赫兹探测天线(即探测光路);携带样品信息的太赫兹波与探测光相遇,被太赫兹探测天线所接收,通过波谱分析技术对样品进行定量和定性识别。
[0003]
现在太赫兹光谱以及成像系统中测量反射和透射时,没有一个集成的系统,需要分别搭建反射和透射光路,而且大部分都是手动调节角度,不够准确。
技术实现要素:
:
[0004]
本发明目的在于克服现有技术存在的缺点,寻求设计一种360度高精度透反射调节平台,解决了太赫兹光谱和成像系统中发射光路和透射光路的自动转换问题。本发明通过电机带动发射光路单元、探测光路单元做任意角度的转动,采用光栅尺实时反馈发射光路单元、探测光路单元位置,从而使发射光路单元、探测光路单元形成准确的指定夹角,达到在一个平台中实现透射、反射测量的目的。
[0005]
为了实现上述目的,本发明涉及的360度太赫兹时域光谱系统高精度透反射调节平台,包括发射光路单元、探测光路单元、圆形标尺和驱动单元,发射光路单元和探测光路单元沿圆形标尺的半径方向安装设置,发射光路单元或探测光路单元与驱动单元连接,在驱动单元的带动下,发射光路单元相对于探测光路单元绕圆形标尺圆心转动,根据需要实现探测光路单元光轴和发射光路单元光轴之间0-360℃任意夹角的调整。
[0006]
进一步地,所述360度太赫兹时域光谱系统高精度透反射调节平台,还包括样品支架、发射光路光栅尺和探测光路光栅尺,样品支架安装在圆形标尺圆心处,且样品支架上的样品孔恰好位于探测光路单元光轴和发射光路单元光轴的交点处,发射光路光栅尺和探测光路光栅尺分别固定在发射光路单元、探测光路单元上,随着发射光路单元、探测光路单元运动,实时感应圆形标尺上的刻度,反馈发射光路单元、探测光路单元的实时角度位置。
[0007]
进一步地,所述发射光路单元包括太赫兹发射天线、第一准直透镜和第一聚焦透镜,所述探测光路单元包括第二聚焦透镜、第二准直透镜和太赫兹探测天线,太赫兹发射天线、第一准直透镜和第一聚焦透镜,以及第二聚焦透镜、第二准直透镜和太赫兹探测天线,分别根据设计焦距依次固定安装,太赫兹发射天线、第一准直透镜和第一聚焦透镜依次固定安装在发射光路连杆上,第二聚焦透镜、第二准直透镜和太赫兹探测天线依次固定连接在探测光路连杆上,发射光路光栅尺和探测光路光栅尺分别固定在圆形标尺的正投影与发
射光路连杆和探测光路连杆的交点处。
[0008]
较佳地,所述驱动单元固定在圆形标尺圆心轴线上,与发射光路单元或探测光路单元直接连接。
[0009]
作为一种实现方式,驱动单元为双轴双向电机,其由两个步进电机组成,内部透过蜗轮蜗杆结构实现各自的运动传输,双轴双向电机固定在圆形标尺圆心轴线上,发射光路连杆一端与双轴双向电机第一输出轴连接,双轴双向电机第一输出轴带动发射光路连杆绕圆形标尺运动,过程中,发射光路光栅尺实时探测发射光路连杆所在位置,将该位置信号反馈给双轴双向电机,同理,探测光路连杆一端与双轴双向电机第二输出轴连接,双轴双向电机第二输出轴带动探测光路连杆绕圆形标尺运动,过程中,探测光路光栅尺实时探测探测光路连杆9所在位置,将该位置信号反馈给双轴双向电机,基于两位置信号计算发射光路单元光轴和探测光路单元光轴之间的夹角。
[0010]
具体地,所述双轴双向步进电机包括壳体、第一步进电机、第二步进电机,双轴双向步进电机第一输出轴和双轴双向步进电机第二输出轴,第一步进电机和第二步进电机上下依次设置,在第一步进电机输出轴上设置啮齿形成蜗杆部,在双轴双向步进电机第一输出轴凸起处环形设置啮齿形成蜗轮部,第一步进电机输出轴水平伸入壳体内,双轴双向步进电机第一输出轴垂直置于壳体内,且双轴双向步进电机第一输出轴与壳体转动连接,第一步进电机输出轴蜗杆部与双轴双向步进电机第一输出轴涡轮部啮合,在第二步进电机输出轴上设置啮齿形成蜗杆部,在双轴双向步进电机第二输出轴凸起处环形设置啮齿形成蜗轮部,第二步进电机输出轴水平伸入壳体内,双轴双向步进电机第二输出轴垂直置于壳体内且下部与壳体转动连接,双轴双向步进电机第二输出轴上部嵌入双轴双向步进电机第一输出轴中部开设的通孔内,双轴双向步进电机第一输出轴和双轴双向步进电机第二输出轴互不干涉且同轴固定设置,第二步进电机输出轴蜗杆部与双轴双向步进电机第二输出轴涡轮部啮合。
[0011]
作为另一种实现方式,驱动单元包括第一驱动电机和第二驱动电机,第一驱动电机和第二驱动电机上下对称安装在圆形标尺圆心轴线上,发射光路连杆一端与第一驱动电机输出轴,第一驱动电机带动发射光路连杆绕圆形标尺运动,过程中,发射光路光栅尺实时探测发射光路连杆所在位置,将该位置信号反馈给第一驱动电机,同理,探测光路连杆一端与第二驱动电机连接,第二驱动电机带动探测光路连杆绕圆形标尺运动,过程中,探测光路光栅尺实时探测探测光路连杆所在位置,将该位置信号反馈给第二驱动电机,基于两位置信号计算发射光路单元光轴和探测光路单元光轴之间的夹角。
[0012]
作为再一种实现方式,驱动单元包括第三驱动电机,第三驱动电机安装在圆形标尺圆心轴线上,发射光路连杆和探测光路连杆中任一连杆与第三驱动电机连接,剩余一连杆固定不动,第三驱动电机转动,带动发射光路连杆相对探测光路连杆绕圆形标尺圆心转动,实现探测光路单元光轴和发射光路单元光轴之间0-360℃任意夹角的调整。
[0013]
进一步地,发射光路连杆和探测光路连杆的长度大于等于圆形标尺半径,在该范围内,圆形标尺在水平方向上可以任意调节,在发射光路光栅尺和探测光路光栅尺的探测范围内,圆形标尺在垂直方向上可以任意调节。
[0014]
圆形标尺和驱动单元均固定在底板上,发射光路光栅尺和探测光路光栅尺分别通过垂直设置的发射光路支杆和探测光路支杆固定在发射单元连杆8和探测单元连杆的底
部。
[0015]
本发明与现有技术相比具有以下有益效果:
[0016]
1.360度高精度透反射调节平台可以为太赫兹光谱分析以及太赫兹光谱成像分析提供一个稳定、准确、一致的测量环境;
[0017]
2.双轴双向步进电机实现了双向调节角度的功能,光栅尺实时反馈位置,保证了夹角的准确性、一致性;
[0018]
3.可调式样品支架可以根据样品进行相应的高度调节。
附图说明:
[0019]
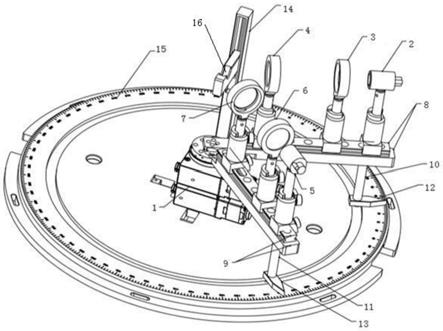
图1是本发明涉及的太赫兹时域光谱系统高精度透反射调节平台立体结构图。
[0020]
图2是图1中双轴双向步进电机的立体图。
[0021]
图3是图2中双轴双向步进电机的剖面图。
具体实施方式:
[0022]
下面通过具体实施例并结合附图对本发明作进一步说明。
[0023]
实施例1:
[0024]
一种360度太赫兹时域光谱系统高精度透反射调节平台,包括发射光路单元、探测光路单元、圆形标尺15和驱动单元,发射光路单元和探测光路单元沿圆形标尺的半径方向安装设置,发射光路单元或探测光路单元与驱动单元连接,在驱动单元的带动下,发射光路单元相对于探测光路单元绕圆形标尺圆心转动,根据需要实现探测光路单元光轴和发射光路单元光轴之间0-360℃任意夹角的调整,精度为0.05度。
[0025]
进一步地,所述360度太赫兹时域光谱系统高精度透反射调节平台,还包括样品支架、发射光路光栅尺12和探测光路光栅尺13,样品支架安装在圆形标尺圆心处,且样品支架14上的样品孔16恰好位于探测光路单元光轴和发射光路单元光轴的交点处,发射光路光栅尺12和探测光路光栅尺13分别固定在发射光路单元、探测光路单元上,随着发射光路单元、探测光路单元运动,实时感应圆形标尺15上的刻度,反馈发射光路单元、探测光路单元的实时角度位置。
[0026]
进一步地,所述发射光路单元包括太赫兹发射天线2、第一准直透镜3和第一聚焦透镜4,所述探测光路单元包括第二聚焦透镜7、第二准直透镜6和太赫兹探测天线5,太赫兹发射天线2、第一准直透镜3和第一聚焦透镜4,以及第二聚焦透镜7、第二准直透镜6和太赫兹探测天线5,分别根据设计焦距依次固定安装。
[0027]
本实施例涉及的驱动单元与发射光路单元或探测光路单元直接连接,带动设置好的发射光路单元或探测光路单元整体一起转动,或太赫兹发射天线2、第一准直透镜3和第一聚焦透镜4分别与一驱动单元连接,在对应驱动单元的带动下绕圆形标尺圆心转动,第二聚焦透镜7、第二准直透镜6和太赫兹探测天线5分别一驱动单元连接,在对应驱动单元的带动下圆形标尺圆心转动。为了保证运行的一致性,简化装置结构,发射光路单元或探测光路单元整体一起转动为较佳方案。
[0028]
较佳地,为了提高系统的稳定性、集成性,简化使用过程,所述驱动单元固定在圆形标尺圆心轴线上,与发射光路单元或探测光路单元直接连接。本实施例所述360度太赫兹
时域光谱系统高精度透反射调节平台,还包括发射光路连杆8和探测光路连杆9,太赫兹发射天线2、第一准直透镜3和第一聚焦透镜4依次固定安装在发射光路连杆8上,第二聚焦透镜7、第二准直透镜6和太赫兹探测天线5依次固定连接在探测光路连杆9上,发射光路光栅尺12和探测光路光栅尺13分别固定在圆形标尺的正投影与发射光路连杆8和探测光路连杆9的交点处,以便于能够实时感应圆形标尺上的角度刻度,确认发射光路单元和探测光路单元所在位置。
[0029]
作为一种实现方式,驱动单元为双轴双向电机1,其由两个步进电机组成,内部透过蜗轮蜗杆结构实现各自的运动传输,双轴双向电机固定在圆形标尺圆心轴线上,发射光路连杆8一端与双轴双向电机第一输出轴连接,双轴双向电机第一输出轴带动发射光路连杆8绕圆形标尺15运动,过程中,发射光路光栅尺12实时探测发射光路连杆8所在位置,将该位置信号反馈给双轴双向电机,同理,探测光路连杆9一端与双轴双向电机第二输出轴连接,双轴双向电机第二输出轴带动探测光路连杆9绕圆形标尺15运动,过程中,探测光路光栅尺13实时探测探测光路连杆9所在位置,将该位置信号反馈给双轴双向电机,基于两位置信号计算发射光路单元光轴和探测光路单元光轴之间的夹角。
[0030]
具体地,所述双轴双向步进电机包括壳体、第一步进电机、第二步进电机,双轴双向步进电机第一输出轴101和双轴双向步进电机第二输出轴102,第一步进电机和第二步进电机上下依次设置,在第一步进电机输出轴103上设置啮齿形成蜗杆部,在双轴双向步进电机第一输出轴101凸起处环形设置啮齿形成蜗轮部105,第一步进电机输出轴103水平伸入壳体107内,双轴双向步进电机第一输出轴101垂直置于壳体107内,且双轴双向步进电机第一输出轴101与壳体107转动连接,第一步进电机输出轴蜗杆部与双轴双向步进电机第一输出轴涡轮部105啮合,在第二步进电机输出轴104上设置啮齿形成蜗杆部,在双轴双向步进电机第二输出轴102凸起处环形设置啮齿形成蜗轮部106,第二步进电机输出轴104水平伸入壳体107内,双轴双向步进电机第二输出轴102垂直置于壳体107内且下部与壳体转动连接,双轴双向步进电机第二输出轴102上部嵌入双轴双向步进电机第一输出轴101中部开设的通孔内,双轴双向步进电机第一输出轴101和双轴双向步进电机第二输出轴102互不干涉且同轴固定设置,第二步进电机输出轴蜗杆部与双轴双向步进电机第二输出轴涡轮部106啮合。
[0031]
作为另一种实现方式,驱动单元包括第一驱动电机和第二驱动电机,第一驱动电机和第二驱动电机上下对称安装在圆形标尺圆心轴线上,发射光路连杆8一端与第一驱动电机输出轴,第一驱动电机带动发射光路连杆8绕圆形标尺15运动,过程中,发射光路光栅尺12实时探测发射光路连杆8所在位置,将该位置信号反馈给第一驱动电机,同理,探测光路连杆9一端与第二驱动电机连接,第二驱动电机带动探测光路连杆9绕圆形标尺15运动,过程中,探测光路光栅尺13实时探测探测光路连杆9所在位置,将该位置信号反馈给第二驱动电机,基于两位置信号计算发射光路单元光轴和探测光路单元光轴之间的夹角。无论是双轴双向电机还是第一驱动电机和第二驱动电机,均可以实现双向转动,通过调节转速,调整发射光路单元和探测光路单元的运行速度。
[0032]
作为再一种实现方式,驱动单元包括第三驱动电机,第三驱动电机安装在圆形标尺圆心轴线上,发射光路连杆8和探测光路连杆9中任一连杆与第三驱动电机连接,剩余一连杆固定不动,第三驱动电机转动,带动发射光路连杆8相对探测光路连杆9绕圆形标尺圆
心转动,实现探测光路单元光轴和发射光路单元光轴之间0-360℃任意夹角的调整。
[0033]
进一步地,发射光路连杆8和探测光路连杆9的长度大于等于圆形标尺半径,在该范围内,圆形标尺在水平方向上可以任意调节,在发射光路光栅尺12和探测光路光栅尺13的探测范围内,圆形标尺在垂直方向上可以任意调节。
[0034]
为了提高系统的稳定形和使用的方便性,将圆形标尺和驱动单元均固定在底板上,发射光路光栅尺12和探测光路光栅尺13分别通过垂直设置的发射光路支杆10和探测光路支杆11固定在发射单元连杆8和探测单元连杆9的底部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1