一种用于车辆周边障碍物检测的装置及检测方法与流程
1.本发明属于车辆主动安全监控技术领域,具体涉及一种用于车辆周边障碍物检测的装置及检测方法。
背景技术:
2.现有的其次安全监控技术中,检测装置是直接利用超声波探头将声波的机械振动转换为电容容量的变化,然后经过长导线在后端进行电压转换,由于导线上的干扰,容易产生误报等错误,原模拟超声波存在抗干扰能力弱,传输距离近,组网方式复杂等缺点。
技术实现要素:
3.为克服上述现有技术的不足,本发明的目的在于提供一种用于车辆周边障碍物检测的装置及检测方法,具有抗干扰能强,传输距离远,组网方式简单的特点。
4.为实现上述目的,本发明采用的技术方案是:一种用于车辆周边障碍物检测的装置,包括有mcu主控制器1,mcu主控制器的uart端通过rs485总线与四芯航插的通讯端相连;四芯航插的电源端与驱动电路的电源端相连;驱动电路的驱动端与升压电路的输入端相连;升压电路的输出端与超声波探头相连;超声波探头的信号检测端与低通滤波器bpf的滤波输入端相连;低通滤波器bpf的滤波输出端与mcu主控制器的信号采集端相连;四芯航插的供电端与线性稳压ldo的输入端相连。
5.利用用于车辆周边障碍物检测的装置的方法,包括以下步骤:
6.步骤1,装置初始化后,mcu读取当前id
7.12v电压一路直接给驱动电路和升压电路,另一路通过线性稳压ldo将降压到5v供给mcu主控制器和rs485总线及滤波电路;
8.步骤2,控制信号输出
9.mcu主控制器1通过pwm方式控制驱动电路驱动升压电路,将12v电压升到120v供给超声波探头,超声波探头将变化的电压信号转换成超声波的机械振动,按照固定的角度发射出去;
10.步骤3,信号采集处理
11.发射出去的超声波振动信号碰到障碍物会反射回来,超声波探头在发射模式发射完成超波信号之后,立刻切换成接收模式,接收超声波信号,然后经过带通滤波,将接收的信号传输给mcu主控制器进行处理;
12.步骤4,距离计算
13.超声波信号传输根据声速计算公式取20℃时c=342m/s,假设信号发送的时间起点为t0,接收到超声波信号的时间为t1,则可以计算出超声波探头距离障碍物的最短距离s=(t1-t0)*c/2;
14.步骤5,信号传输
15.通过mcu主控制器1计算出障碍物距离后,然后通过rs485总线传输按照约定的通
讯协议传输出去,rs485总线具有通讯距离远,抗干扰能力强,每个总线上最多可以挂256个从设备。
16.本发明的有益效果是:
17.本发明的装置由于采用了rs485串口,所以具有抗干扰能力强。挂载探头节点多的优点;由于采用了在探头端进行超声波微弱模拟信号处理,所以具有更高信噪比的优点;本发明的方法由于采用了低通信号滤波放大的步骤,所以具有更远的检测距离的优点;本发明是不经过长导线来传输微弱模拟信号,直接在探头前端进行信号处理。因此在模拟的基础上研发出数字超声波,数字超声波具有抗干扰能强,传输距离远,组网方式简单等优点。
附图说明
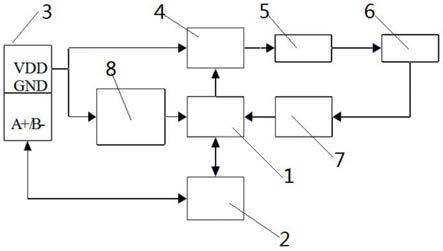
18.图1为本发明的原理框图。
19.图2为本发明的系统组网示意图。
20.图3为本发明的工作流程图。
具体实施方式
21.下面结合具体实施例和附图对本发明作进一步详细说明。
22.参见图1,一种用于车辆周边障碍物检测的装置,包括有mcu主控制器1,mcu主控制器1的uart端通过rs485总线2与四芯航插3的通讯端相连;四芯航插3的电源端与驱动电路4的电源端相连;驱动电路4的驱动端与升压电路5的输入端相连;升压电路的输出端与超声波探头6相连;超声波探头6的信号检测端与低通滤波器bpf7的滤波输入端相连;低通滤波器bpf的滤波输出端与mcu主控制器1的信号采集端相连;四芯航插3的供电端与线性稳压ldo8的输入端相连。
23.本发明用于车辆周边障碍物检测的装置(数字超声波)的实现框图参见图1-2所示:
24.电源部分:外部电源给数字超声波提供12v电压,12v电压一路直接给驱动电路和升压电路,另一路通过线性稳压电路ldo将降压到5v供给mcu和rs485总线及滤波电路;
25.控制信号输出部分:mcu主控制器1通过pwm方式控制驱动电路4驱动升压电路5,将12v电压升到120v供给超声波探头6,超声波探头6将变化的电压信号转换成超声波的机械振动,按照固定的角度发射出去;
26.信号采集处理部分:发射出去的超声波振动信号碰到障碍物会反射回来,超声波探头6在发射模式发射完成超波信号之后,立刻切换成接收模式,接收超声波信号,然后经过带通滤波,将接收的信号传输给mcu主控制器1进行处理;
27.距离计算:根据声速计算公式取20℃时c=342m/s,假设信号发送的时间起点为t0,接收到超声波信号的时间为t1,则可以计算出超声波探头距离障碍物的最短距离s=(t1-t0)*c/2;
28.信号传输:通过mcu计算出障碍物距离后,然后通过rs485总线传输按照约定的通讯协议传输出去,rs485总线具有通讯距离远,抗干扰能力强,每个总线上最多可以挂256个从设备。具体工作流程参见图3。
29.系统组网:系统组网主要由一个主设备(主控制器),多个从设备(数字超声波传感
器)组成,主设备主要给从设备供电和与从设备通讯,主设备读取从设备的距离和位置信息,将这些信息传输给后级终端进行处理或者报警。
30.利用用于车辆周边障碍物检测的装置的方法,包括以下步骤:
31.步骤1,装置初始化后,mcu读取当前id
32.12v电压一路直接给驱动电路和升压电路,另一路通过线性稳压ldo将降压到5v供给mcu主控制器1和rs485总线2及滤波电路(7);
33.步骤2,控制信号输出
34.mcu主控制器1通过pwm方式控制驱动电路4驱动升压电路5,将12v电压升到120v供给超声波探头6,超声波探头6将变化的电压信号转换成超声波的机械振动,按照固定的角度发射出去;
35.步骤3,信号采集处理
36.发射出去的超声波振动信号碰到障碍物会反射回来,超声波探头6在发射模式发射完成超波信号之后,立刻切换成接收模式,接收超声波信号,然后经过带通滤波,将接收的信号传输给mcu主控制器1进行处理;
37.步骤4,距离计算
38.超声波信号传输根据声速计算公式取20℃时c=342m/s,假设信号发送的时间起点为t0,接收到超声波信号的时间为t1,则可以计算出超声波探头6距离障碍物的最短距离s=(t1-t0)*c/2;
39.步骤5,信号传输
40.通过mcu主控制器1计算出障碍物距离后,然后通过rs485总线2传输按照约定的通讯协议传输出去,rs485总线2具有通讯距离远,抗干扰能力强,每个总线上最多可以挂256个从设备。
技术特征:
1.一种用于车辆周边障碍物检测的装置,包括有mcu主控制器(1),其特征在于,mcu主控制器(1)的uart端通过rs485总线(2)与四芯航插(3)的通讯端相连;四芯航插(3)的电源端与驱动电路(4)的电源端相连;驱动电路(4)的驱动端与升压电路(5)的输入端相连;升压电路的输出端与超声波探头(6)相连;超声波探头(6)的信号检测端与低通滤波器bpf(7)的输入端相连;低通滤波器bpf的滤波输出端与mcu主控制器(1)的信号采集端相连;四芯航插(3)的供电端与线性稳压ldo(8)的输入端相连。2.利用用于车辆周边障碍物检测的装置的方法,其特征在于,包括以下步骤:步骤1,装置初始化后,mcu主控制器(1)读取当前id12v电压一路直接给驱动电路和升压电路,另一路通过线性稳压器ldo将降压到5v供给mcu主控制器(1)和rs485总线2及滤波电路(7);步骤2,控制信号输出mcu主控制器(1)通过pwm方式控制驱动电路(4)驱动升压电路(5),将12v电压升到120v供给超声波探头(6),超声波探头(6)将变化的电压信号转换成超声波的机械振动,按照固定的角度发射出去;步骤3,信号采集处理发射出去的超声波振动信号碰到障碍物会反射回来,超声波探头(6)在发射模式发射完成超波信号之后,立刻切换成接收模式,接收超声波信号,然后经过带通滤波,将接收的信号传输给mcu主控制器(1)进行处理;步骤4,距离计算超声波信号传输根据声速计算公式取20℃时c=342m/s,假设信号发送的时间起点为t0,接收到超声波信号的时间为t1,则可以计算出超声波探头6距离障碍物的最短距离s=(t1-t0)*c/2;步骤5,信号传输通过mcu主控制器(1)计算出障碍物距离后,然后通过rs485总线(2)传输按照约定的通讯协议传输出去。
技术总结
一种用于车辆周边障碍物检测的装置,包括有MCU主控制器,MCU主控制器通过RS485总线与四芯航插相连;四芯航插与驱动电路相连;驱动电路与升压电路相连;升压电路与超声波探头相连;超声波探头的与低通滤波器BPF相连;低通滤波器BPF与MCU主控制器相连;四芯航插与线性稳压LDO相连;利用用于车辆周边障碍物检测的装置的方法,包括以下步骤:步骤1,装置初始化后,MCU读取当前ID;步骤2,控制信号输出;步骤3,信号采集处理;步骤4,距离计算;步骤5,信号传输;具有抗干扰能强,传输距离远,组网方式简单等的点。的点。的点。
技术研发人员:祝东东 史志勇 陈倩兰
受保护的技术使用者:西安正昌电子股份有限公司
技术研发日:2021.11.02
技术公布日:2022/2/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1