传感器装置的制作方法
1.本公开涉及传感器装置。
背景技术:
2.日本未经审查的专利申请公开no.2020-112390(jp 2020-112390 a)公开了一种检测旋转轴的旋转角度的传感器装置。该传感器装置具有固定至旋转轴的主驱动齿轮和与主驱动齿轮接合的两个从动齿轮。从动齿轮中的每一者具有与主驱动齿轮的齿接合的齿轮部分以及从齿轮部分的侧表面沿着齿轮部分的轴线延伸的轴部分。从动齿轮的轴部分以可旋转的方式支承在支承孔中,该支承孔被包括在用于支承传感器装置的诸如从动齿轮之类的部件的支承构件中。
3.在jp 2020-112390 a中描述的传感器装置通过对应于两个从动齿轮中的每一者设置的传感器来检测从动齿轮的旋转角度,并且基于所检测到的从动齿轮的旋转角度来计算旋转轴的旋转角度。这种传感器装置具有偏置构件,该偏置构件使从动齿轮朝向主驱动齿轮偏置,以减小主驱动齿轮与从动齿轮之间的齿隙。
技术实现要素:
4.例如,当从动齿轮的轴部分以一定间隙支承在支承孔内时,轴部分随着主驱动齿轮的旋转沿旋转方向在间隙范围内操作。在这种情况下,从动齿轮的轴线偏移,并且从动齿轮的轴部分相对于对应传感器的位置改变。由于从动齿轮的轴部分相对于对应传感器的位置的改变,传感器的检测结果的准确度可能会发生变化。
5.本发明的一方面是传感器装置。该传感器装置包括:主驱动齿轮,该主驱动齿轮固定至待检测的旋转轴;从动齿轮,所述从动齿轮各自包括与主驱动齿轮的齿接合的齿轮部分并且设置有从齿轮部分的侧表面沿着齿轮部分的轴线延伸的轴部分;偏置构件,该偏置构件构造成使从动齿轮朝向主驱动齿轮偏置;支承构件,该支承构件具有以可旋转的方式支承轴部分的支承孔,并且该支承构件构造成通过对轴部分的支承来支承从动齿轮并且构造成支承偏置构件;以及传感器,该传感器配置成基于从动齿轮的旋转而产生电信号。在偏置构件使从动齿轮偏置时所施加的力中,假设与力的作用点处的切线正交的方向被设定为第一方向,第一方向与第二方向不同,其中,第二方向是当从动齿轮被朝向主驱动齿轮偏置时在从动齿轮朝向主驱动齿轮操作时有助于减小从动齿轮与主驱动齿轮之间产生的齿隙的方向。
6.利用这样的构型,可以将偏置构件使从动齿轮偏置时所施加的力分解为第二方向上的分力和正交于第二方向的方向上的分力。从动齿轮通过第二方向上的分力的作用被压向主驱动齿轮。因此,减小了在力沿第一方向起作用的同时在从动齿轮与主驱动齿轮之间产生的齿隙。此外,轴部分通过正交于第二方向的方向上的分力的作用被压向支承孔的内周表面。因此,例如,即使当轴部分以一定间隙支承在支承孔中时,在力沿第一方向起作用的同时,从动齿轮在间隙范围内的操作也受到限制。在这种情况下,在确保了用于减小从动
齿轮与主驱动齿轮之间产生的齿隙的力的同时,还可以确保用于限制从动齿轮在间隙范围内的操作的力。因此,即使当主驱动齿轮旋转时,从动齿轮的操作也受到限制。在这种情况下,从动齿轮的轴线偏移,并且从动齿轮的轴部分相对于对应传感器的位置的变化受到抑制,并且传感器的检测结果的准确度的变化受到抑制。
7.在传感器装置中,从动齿轮和偏置构件的位置可以被调节成使得:在沿第一方向作用的力中,即使当主驱动齿轮旋转时,分解在第三方向上的分力也具有可以维持从动齿轮被压向支承孔的内周表面的状态的量值。第三方向可以是与第二方向正交的方向。
8.利用这样的构型,由于从动齿轮和偏置构件的位置被调节,例如,可以调节所述方向中的每个方向上的力,从而在确保将被分解在第三方向上的分力的足够量值的同时防止将被分解在第二方向上的分力变得不必要得大。
9.在传感器装置中,支承构件可以具有支承孔,该支承孔具有沿第二方向延伸的长形形状并且具有在第二方向上彼此分离开的两个弧形部分和沿第二方向连接两个弧形部分的两个线性部分。从动齿轮和偏置构件的位置可以被调节成使得第三方向与支承孔的两个线性部分中的与作用点分离开的一个线性部分相交。
10.利用这样的构型,在支承孔的两个线性部分中的与作用点分离开的一个线性部分中,由于第三方向上的分力而产生反作用力。该反作用力在限定产生在支承孔的内周表面与被压向内周表面的轴部分的外周表面之间的摩擦力时作为法向力产生。因此,可以适当地维持轴部分被压向支承孔的内周表面的状态。
11.在传感器装置中,从动齿轮可以包括第一从动齿轮和第二从动齿轮。偏置构件可以是扭力螺旋弹簧,该扭力螺旋弹簧包括在施加载荷时产生弯曲应力的线圈部分以及从线圈部分的两个端部沿不同方向延伸的两个臂部分。两个臂部分可以包括使第一从动齿轮朝向主驱动齿轮侧偏置的第一臂部分以及使第二从动齿轮朝向主驱动齿轮侧偏置的第二臂部分。
12.利用这样的构型,可以设置一个构件作为用于第一从动齿轮和第二从动齿轮的偏置构件。因此,在传感器装置中,可以抑制部件数量的增加。
13.在传感器装置中,支承构件可以包括支承线圈部分的线圈支承部分。关于通过将使第一从动齿轮的轴部分的轴线与第二从动齿轮的轴部分的轴线连接的线段延伸而获得的虚拟线,线圈支承部分可以设置在与设置有主驱动齿轮的一侧相反的一侧。当在第一臂部分和第二臂部分向与设置有主驱动齿轮的一侧相反的一侧变形的方向上施加载荷时,线圈部分可以在被线圈支承部分支承的同时产生弯曲应力。第一臂部分和第二臂部分中的每一者可以包括:从线圈部分向设置有主驱动齿轮的一侧延伸的基部端部部分,以及从基部端部部分向与设置有主驱动齿轮的一侧相反的一侧延伸的梢端部分。梢端部分可以是在偏置构件使从动齿轮偏置时所施加的力的作用点。
14.利用这样的构型,第一臂部分的梢端部分和第二臂部分的梢端部分中的每一者在与待偏置的从动齿轮相反的另一从动齿轮的一侧的部分处与待偏置的从动齿轮的轴部分接触。在这种情况下,在偏置构件使从动齿轮朝向主驱动齿轮偏置时第一方向与第二方向不同。因此,例如,即使由于与其他构型的关系,线圈部分需要关于虚拟线被支承构件支承在与设置有主驱动齿轮的一侧相反的一侧时,在传感器装置中,也可以实现下述构型:在该构型中,即使当主驱动齿轮旋转时,也可以限制从动齿轮的操作。
15.传感器装置还可以包括以可旋转的方式围绕轴部分的管状构件。偏置构件可以构造成通过对管状构件的偏置而使从动齿轮朝向主驱动齿轮偏置。
16.利用这样的构型,可以通过设置管状构件来防止偏置构件与轴部分直接接触。因此,可以抑制由于与偏置构件直接接触而导致的轴部分的磨损。
17.根据本发明的传感器装置,可以抑制检测从动齿轮的旋转角度的传感器的检测结果的准确度的变化。
附图说明
18.下面将参照附图对本发明的示例性实施方式的特征、优点以及技术和工业意义进行描述,在附图中,相同的附图标记表示相同的元件,并且在附图中:
19.图1是转向装置的示意性构型图;
20.图2是沿着包括第一从动齿轮的轴线的表面截取的传感器装置的剖视图;
21.图3是示出了扭矩传感器装置的示意性构型的立体图;
22.图4是沿着支承构件与止挡件之间的表面截取的并且从基板侧沿第一小齿轮轴的轴向方向观察的图2的局部剖视图;
23.图5是沿着支承构件与基板之间的表面截取的并且从基板侧沿第一小齿轮轴的轴向方向观察的图2的局部剖视图;
24.图6是示意地示出了根据实施方式的轴部分、管状构件、支承孔与偏置构件之间的位置关系的示意图;
25.图7是示意地示出了根据实施方式的轴部分、管状构件、支承孔与偏置构件之间的位置关系的示意图;
26.图8是示出了根据比较示例的在偏置构件使管状构件偏置时所施加的力的视图;
27.图9是示意地示出了根据另一实施方式的轴部分、管状构件、支承孔与偏置构件之间的位置关系的示意图;
28.图10是示意地示出了根据又一实施方式的轴部分、管状构件、支承孔与偏置构件之间的位置关系的示意图;
29.图11是示意地示出了根据又一实施方式的轴部分、管状构件、支承孔与偏置构件之间的位置关系的示意图;以及
30.图12是示意地示出了根据又一实施方式的轴部分、管状构件、支承孔与偏置构件之间的位置关系的示意图。
具体实施方式
31.在下文中,将参照附图描述传感器装置应用于转向装置的实施方式。如图1中所示,转向装置10包括连接至方向盘11的转向轴12、第一小齿轮轴13、变向轴14、马达21、减速机构22、第二小齿轮轴23、传感器装置24和控制装置25。转向装置10是电动助力转向装置。
32.转向轴12连接至方向盘11。第一小齿轮轴13设置在转向轴12的位于与方向盘11相反的一侧的端部部分处。第一小齿轮轴13的小齿轮齿13a与变向轴14的齿条齿14a接合,变向轴14沿与第一小齿轮轴13相交的方向延伸。左右变向轮16分别经由拉杆15连接至变向轴14的两个端部。
33.马达是转向辅助力的来源。例如,采用三相无刷马达作为马达21。马达21经由减速机构22连接至第二小齿轮轴23。第二小齿轮轴23的小齿轮齿23a与变向轴14的齿条齿14b接合。通过减速机构22使马达21的旋转减速,并且经减速的旋转力作为转向辅助力从第二小齿轮轴23经由变向轴14传递至第一小齿轮轴13。
34.传感器装置24的检测对象是作为旋转轴的第一小齿轮轴13。传感器装置24通过驾驶员相对于方向盘11的转向操作检测作用在第一小齿轮轴13上的扭矩作为转向扭矩th。此外,传感器装置24检测第一小齿轮轴13的在超过360度的多圈旋转中的旋转角度θpa作为转向角度θs。
35.包括传感器装置24和设置在车辆中的车辆速度传感器26的各种传感器连接至控制装置25。例如,由传感器装置24检测到的转向扭矩th和转向角度θs被输入至控制装置25。此外,由车辆速度传感器26检测到的车辆速度v被输入至控制装置25。控制装置25通过基于各种传感器的包括转向扭矩th、转向角度θs和车辆速度v的检测结果执行对马达21的通电控制来产生马达21的旋转力。因此,控制装置25通过基于驾驶员相对于方向盘11的操作将马达21的旋转力作为转向辅助力施加至第一小齿轮轴13来协助驾驶员进行转向操作。
36.将描述传感器装置24的配置。在下文中,为了便于说明,关于第一小齿轮轴13,设置有转向轴12的一侧被称为上侧,并且设置有变向轴14的一侧被称为下侧。此外,沿着第一小齿轮轴13的轴线的方向被称为轴向方向,与第一小齿轮轴13的轴线正交的方向被称为径向方向,并且围绕第一小齿轮轴13的轴线的方向被称为周向方向。
37.如图2中所示,传感器装置24包括传感器壳体31、扭矩传感器装置41和旋转角度传感器装置51。扭矩传感器装置41检测转向扭矩th。旋转角度传感器装置51检测转向角度θs。也就是说,本实施方式的传感器装置24是组合了扭矩传感器装置41和旋转角度传感器装置51的扭矩角度传感器装置。
38.传感器壳体31安装在容纳变向轴14和第一小齿轮轴13的齿轮壳体17中。传感器壳体31具有彼此连通的插入部分32和延伸部分33。插入部分32具有管状形状。插入部分32沿轴向方向延伸。第一小齿轮轴13插入穿过插入部分32。第一小齿轮轴13包括位于转向轴12侧的输入轴、位于变向轴14侧的输出轴、以及将输入轴和输出轴彼此连接的扭力杆。延伸部分33具有盒状形状。延伸部分33从插入部分32沿径向方向延伸。延伸部分33具有开口部分33a,该开口部分33a从插入部分32延伸、然后与轴向方向相交并且在轴向方向上向上敞开。开口部分33a从传感器壳体31的外部被盖34封闭。扭矩传感器装置41和旋转角度传感器装置51被容纳在以这种方式限定的插入部分32和延伸部分33的内部区域中。
39.具体地,如图3中所示,扭矩传感器装置41包括:两个磁轭,包括第一磁轭42和第二磁轭43;两个集磁环,包括第一集磁环44和第二集磁环45;两个磁传感器,包括第一磁传感器46和第二磁传感器47;以及永磁体48。
40.永磁体48具有筒形形状。永磁体48配装成能够相对于输入轴一体地旋转。在永磁体48中,例如,北(n)极和南(s)极在输入轴的周向方向上交替磁化。
41.磁轭42、43中的每一者设置成在周向方向上围绕永磁体48,相对于永磁体48在径向方向上具有间隙。磁轭42、43中的每一者具有筒形形状。磁轭42、43中的每一者以可一体旋转的方式配装至输出轴。磁轭42、43中的每一者形成与永磁体48的磁场相对应的磁路的一部分。第一磁轭42和第二磁轭43沿轴向方向并排设置。
42.第一磁轭42具有第一环形部分42a,该第一环形部分42a具有环形形状。第一环形部分42a在周向方向上连续地延伸以围绕永磁体48的整个圆周。第一环形部分42a设置有多个板状的第一齿部分42b,第一齿部分42b是从第一环形部分42a的位于内周侧的端部部分沿轴向方向向下突出的部分。第一齿部分42b在第一环形部分42a的周向方向上等间隔地设置。第二磁轭43具有作为与第一磁轭42相对应的构型的第二环形部分43a和多个第二齿部分43b。
43.磁轭42、43被组合成使得第一齿部分42b和第二齿部分43b在轴向方向上沿不同的方向突出。此外,第一齿部分42b和第二齿部分43b在周向方向上交替地设置成在径向方向上彼此不重叠。也就是说,第二齿部分43b沿周向方向以一定间隙设置在邻近的第一齿部分42b之间,并且第一齿部分42b沿周向方向以一定间隙设置在邻近的第二齿部分43b之间。
44.第一集磁环44设置成在周向方向上围绕第一磁轭42,相对于第一磁轭42在径向方向上具有间隙。第二集磁环45设置成在周向方向上围绕第二磁轭43,相对于第二磁轭43在径向方向上具有间隙。集磁环44、45中的每一者形成与永磁体48的磁场相对应的磁路的一部分。第一集磁环44和第二集磁环45沿轴向方向并排设置。
45.第一集磁环44具有第一管状部分44a,当沿轴向方向观察时,该第一管状部分44a具有c形管状形状。第一管状部分44a在周向方向上连续地延伸以围绕第一磁轭42的第一环形部分42a的外周的一部分。第一管状部分44a的外周表面连接有第一集磁部分44b。
46.第一集磁部分44b具有作为固定至第一管状部分44a的外周表面的部分的两个固定部分44c、44d。固定部分44c、44d在第一管状部分44a的周向方向上以预定间隔设置。此外,第一集磁部分44b具有作为用于连接在固定部分44c、44d之间的部分的连接部分44e。连接部分44e在连接部分44e与第一管状部分44a的外周表面之间在径向方向上具有间隙。此外,第一集磁部分44b包括两个第一集磁突出部分44f、44g,所述两个第一集磁突出部分44f、44g是从连接部分44e的在轴向方向上位于第二集磁环45侧的端部部分沿径向方向向外突出的部分。第一集磁突出部分44f、44g在第一管状部分44a的周向方向上以预定间隔设置。当沿轴向方向观察时,第一集磁突出部分44f、44g中的每一者具有大致矩形的形状。
47.第二集磁环45设置有作为与第一集磁环44相对应的构型的第二管状部分45a和第二集磁部分45b。第二集磁部分45b包括两个第二集磁突出部分45c、45d,所述两个第二集磁突出部分45c、45d是作为与第一集磁突出部分44f、44g相对应的部分的从第二管状部分45a的在轴向方向上位于第一集磁环44侧的端部部分沿径向方向向外突出的部分。
48.磁传感器46、47设置在图2中示出的基板61的沿轴向方向、即厚度方向位于上侧的一个端表面上。基板61的在轴向方向上位于下侧——即与设置有磁传感器46、47的一侧相反的一侧——的一个端表面侧固定至传感器壳体31的延伸部分33的内部底表面。作为磁传感器46、47中的每一者,例如,可以采用霍尔传感器。第一磁传感器46设置在第一集磁突出部分44f与第二集磁突出部分45c之间。此外,第二磁传感器47设置在第一集磁突出部分44g与第二集磁突出部分45d之间。磁传感器46、47中的每一者检测由永磁体48、第一磁轭42、第二磁轭43、第一集磁环44和第二集磁环45形成的磁路的磁通量以作为电信号。
49.当通过驾驶员的转向操作在第一小齿轮轴13的输入轴与输出轴之间发生相对旋转移位时,扭力杆上产生扭转变形。在扭力杆上产生扭转变形的状态下,第一齿部分42b中的每一者相对于扭力杆上未产生扭转变形的状态在周向方向上偏移,并且因此产生角度差
异。这也适用于第二齿43b中的每一者。因此,在扭力杆上产生扭转变形的状态下,与永磁体48的磁场相对应的磁路形成在磁轭42、43中的每一者和集磁环44、45中的每一者处,并且因此与扭力杆的扭转变形量相对应的磁通量被传输至齿部分42b、43b中的每一者。然后,磁传感器46、47中的每一者产生与由扭力杆的扭转变形引起的磁路的磁通量相对应的电信号。在图1中示出并且连接至磁传感器46、47中的每一者的控制装置25基于由磁传感器46、47中的每一者产生的电信号计算作用在第一小齿轮轴13上的扭矩作为转向扭矩th。
50.如图2和图4中所示,旋转角度传感器装置51包括主驱动齿轮52、由第一从动齿轮53和第二从动齿轮54组成的两个从动齿轮、支承构件55、止挡件56、由第一管状构件74和第二管状构件84组成的两个管状构件、偏置构件100、以及由第一磁传感器62和第二磁传感器63组成的两个磁传感器。
51.主驱动齿轮52具有筒形形状。在主驱动齿轮52的外周表面上设置有多个齿52a。主驱动齿轮52以可一体旋转的方式配装至第一小齿轮轴13。主驱动齿轮52由例如树脂制成。
52.如图2中所示,支承构件55具有接触部分55a和面对部分55b。接触部分55a经由基板61固定至传感器壳体31的延伸部分33的内部底表面。面对部分55b面对基板61,面对部分55b与基板61之间在轴向方向上具有间隙。
53.具体地,如图4和图5中所示,当沿轴向方向观察时,支承构件55具有矩形形状。支承构件55具有长边部分55c,该长边部分55c是面对部分55b的在图5中位于右侧的一部分并且限定了两个长边中的一个长边。支承构件55以齿轮部分71、81中的每一者的一部分从长边部分55c暴露的状态可旋转地支承从动齿轮53、54。支承构件55设置成使得长边部分55c面对主驱动齿轮52,也就是说,使得面对部分55b侧面对主驱动齿轮52。
54.如图5中所示,在支承构件55中,在面对基板61的面对部分55b中设置有第一支承孔91和第二支承孔92。支承孔91、92中的每一者是在轴向方向即厚度方向上穿过面对部分55b的通孔。支承孔91、92分别设置在长边部分55c的两个端部附近。也就是说,在支承构件55中,第一支承孔91设置在短边部分55d的附近,该短边部分55d是面对部分55b的在图5中位于下侧的一部分并且限定了两个短边中的一个短边。此外,在支承构件55中,第二支承孔92设置在短边部分55e的附近,该短边部分55e是面对部分55b的在图5中位于上侧的一部分并且限定了两个短边中的另一短边。
55.当沿第一小齿轮轴13的轴向方向观察时,支承孔91、92中的每一者具有沿径向方向延伸的长形孔形状,径向方向是朝向轴线x的方向。也就是说,支承孔91、92随着其接近主驱动齿轮52而延伸成彼此接近。第一支承孔91包括在作为第一支承孔91延伸的方向的径向方向上彼此分离开的两个弧形部分91a以及沿径向方向连接两个弧形部分91a的两个线性部分91b。弧形部分91a形成通过将正圆一分为二而获得的半圆。第二支承孔92具有作为与第一支承孔91相对应的构型的两个弧形部分92a和两个线性部分92b。
56.如图2和图5中所示,第一从动齿轮53具有第一齿轮部分71和第一轴部分72。第一齿轮部分71具有盘形状。在第一齿轮部分71的外周表面上设置有多个齿71a。第一齿轮部分71的齿71a与主驱动齿轮52的齿52a接合。第一齿轮部分71的齿71a的数量被设定成小于主驱动齿轮52的齿52a的数量。第一轴部分72从第一齿轮部分71的一个侧表面沿着第一齿轮部分71的轴线x延伸。第一轴部分72的外径被设定成小于第一齿轮部分71的外径。在第一轴部分72的梢端部分处设置有在第一轴部分72的轴向方向上具有深度的凹入部分72a。凹入
部分72a的与第一轴部分72的轴向方向正交的横截面具有圆形形状。第一永磁体73配装到凹入部分72a中。第一永磁体73例如是所谓的二极磁体,其中一个n极在其位于径向方向上的一个端部处被磁化并且一个s极在其位于径向方向上的另一端部处被磁化。第一从动齿轮是53由例如树脂制成。
57.此外,第二从动齿轮54具有与第一从动齿轮53相对应的构型。也就是说,第二从动齿轮54具有与第一齿轮部分71、第一轴部分72和第一永磁体73相对应的构型。也就是说,如图5中所示,第二从动齿轮54具有第二齿轮部分81、第二轴部分82和第二永磁体83。第二从动齿轮54的齿的数量与第一从动齿轮53的齿的数量不同。
58.如图2和图5中所示,磁传感器62、63中的每一者设置在基板61的位于面对从动齿轮53、54中的每一者的一侧的一个端表面上,也就是说,设置在沿轴向方向位于上侧的一个端表面上。例如,采用霍尔传感器作为磁传感器62、63中的每一者。第一磁传感器62在轴向方向上面对第一永磁体73。第二磁传感器63在轴向方向上面对第二永磁体83。磁传感器62、63中的每一者检测由永磁体73、83中的每一者形成的磁路的磁通量以作为电信号。
59.当第一小齿轮轴13通过方向盘11的操作而旋转时,固定至第一小齿轮轴13的输入轴的主驱动齿轮52旋转。当主驱动齿轮52旋转时,从动齿轮54、54中的每一者通过主驱动齿轮52的齿52a与从动齿轮53、54中的每一者的齿71a、81a的接合而旋转。当从动齿轮53、54中的每一者旋转时,由永磁体73、83中的每一者形成的磁路的磁通量改变。因此,在第一小齿轮轴13旋转的状态下,形成与永磁体73、83中的每一者的磁场相对应的磁路,并且与小齿轮轴13的旋转量相对应的磁通量被传输至磁传感器62、63中的每一者。然后,磁传感器62、63中的每一者产生与根据第一小齿轮轴13的旋转量引起的磁路的磁通量相对应的电信号。连接至磁传感器62、63中的每一者的图1中所示的控制装置25基于由第一磁传感器62产生的电信号计算第一从动齿轮53的旋转角度,并且基于由第二磁传感器63产生的电信号计算第二从动齿轮54的旋转角度。控制装置25基于计算出的旋转角度计算第一小齿轮轴13的旋转角度θpa作为转向角度θs。
60.如图5中所示,第一从动齿轮53经由第一管状构件74插入到第一支承孔91中。第一管状构件74具有筒形形状。第一管状构件74以可旋转的方式围绕第一轴部分72。第一管状构件74在轴向方向上的长度被设定成与第一轴部分72在轴向方向上的长度大致相同。此外,第一管状构件74的内径被设定成略大于第一轴部分72的外径,并且被设定成相对于第一轴部分72具有间隙。第一管状构件74由能够阻挡磁性的金属材料制成。也就是说,第一管状构件74用作支承第一轴部分72的旋转的轴承,并且用作阻挡第一永磁体73的磁泄露并且因此防止扭矩传感器装置41中的噪声的磁屏蔽件。
61.此外,第一管状构件74的外径被设定成在第一管状构件74的外周表面与第一支承孔91的弧形部分91a的内周表面之间具有间隙,也就是说,在第一管状构件74的外周表面与第一支承孔91的两个线性部分91b的内周表面之间具有间隙。此外,第一齿轮部分71的外径被设定成使得第一齿轮部分71的侧表面和第一支承孔91的弧形部分91a的周向边缘部分——也就是说两个线性部分91b的彼此平行的周向边缘部分——在轴向方向上彼此面对。因此,第一从动齿轮53被限制成朝向基板61侧从第一支承孔91出来。第二管状构件84具有与第一管状构件74相对应的构型。
62.如图2中所示,止挡件56具有板状形状。止挡件56被安装成从在轴向方向上与基板
61相反的一侧覆盖支承构件55的包括从动齿轮53的轴部分72和从动齿轮54的轴部分82的部分。因此,从动齿轮53、54被限制成朝向与基板61相反的一侧从支承孔91、92出来。
63.如图4至图6中所示,在支承构件55的面对部分55b上设置有用于支承偏置构件100的线圈支承部分57。线圈支承部分57具有柱状形状。线圈支承部分57从面对部分55b的沿轴向方向的上侧——即与基板61相反的一侧——突出。
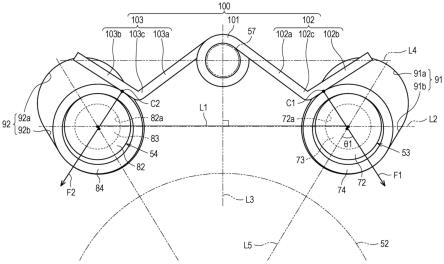
64.这里,如图6中所示,当通过将使第一从动齿轮53的轴部分72的轴线和第二从动齿轮54的轴部分82的轴线连接的线段l1延伸而获得的线被定义为虚拟线l2时,线圈支承部分57被构造成关于虚拟线l2位于与设置有主驱动齿轮52的一侧相反的一侧。此外,线圈支承部分57被构造成位于线段l1的垂直平分线l3上,也就是说,在周向方向上位于第一从动齿轮53和第二从动齿轮54的中心。
65.如图5和图6中所示,偏置构件100具有线圈部分101和由第一臂部分102与第二臂部分103组成的两个臂部分。线圈部分101例如是卷绕成线圈形状使得在施加载荷时产生弯曲应力的金属线。线圈部分101的两个端部构造成处于在线圈部分101的轴向方向上其彼此大致重叠的位置处。沿不同方向延伸的第一臂部分102和第二臂部分103设置在线圈部分101的两个端部处。线圈部分101被调节成使得线圈部分101的两个端部位于与设置有主驱动齿轮52的一侧相反的一侧,并且线圈部分101通过插入到线圈支承部分57中而被支承。然后,在线圈部分101插入到线圈支承部分57中的状态下,当在第一臂部分102和第二臂部分103向与设置有主驱动齿轮52的一侧相反的方向变形的方向上施加载荷时,线圈部分101产生弯曲应力。也就是说,偏置构件100是扭力螺旋弹簧。
66.第一臂部分102具有基部端部部分102a、梢端部分102b和连接部分102c。基部端部部分102a从线圈部分101的两个端部中的一个端部向设置有主驱动齿轮52的一侧延伸。梢端部分102b从基部端部部分102a向与设置有主驱动齿轮52的一侧相反的一侧延伸。
67.这里,如图6中所示,当平行于虚拟线l2穿过线圈部分101的轴线延伸的线被定义为虚拟线l4时,在线圈部分101插入到线圈支承部分57中的状态下,第一臂部分102延伸至虚拟线l2与虚拟线l4之间的范围。然后,在第一臂部分102中,作为基部端部部分102a和梢端部分102b所连接的部分的连接部分102c被构造成位于最靠近主驱动齿轮52的位置。
68.此外,第二臂部分103具有与第一臂部分102相对应的构型。也就是说,第二臂部分103具有与基部端部部分102a、梢端部分102b和连接部分102c相对应的构型。也就是说,如图6中所示,第二臂部分103具有基部端部部分103a、梢端部分103b和连接部分103c。
69.在线圈部分101插入到线圈支承部分57中的状态下,偏置构件100组装至支承构件55,以通过第一臂部分102使第一从动齿轮53和第一管状构件74一起朝向主驱动齿轮52偏置。此外,在线圈部分101插入到线圈支承部分57中的状态下,偏置构件100组装至支承构件55,以通过第二臂部分103使第二从动齿轮54和第二管状构件84一起朝向主驱动齿轮52偏置。
70.然后,在沿第一臂部分102和第二臂部分103向与设置有主驱动齿轮52的一侧相反的方向变形的方向对线圈部分101施加载荷的状态下,偏置构件100被组装至支承构件55。在这种情况下,偏置构件100产生与通过臂部分102、103、通过线圈部分101施加的载荷相对应的弯曲应力f1、f2,作为用于使从动齿轮53、54中的每一者朝向主驱动齿轮52偏置的力。由偏置构件100产生的弯曲应力f1、f2也可以通过向连接部分102c、103c施加载荷而产生,
但是由线圈部分101产生的弯曲应力占主导。
71.具体地,如图6中所示,第一臂部分102通过使梢端部分102b与从与设置有主驱动齿轮52的一侧相反的一侧插入到第一支承孔91中的第一管状构件74的外周表面接触而施加通过线圈部分101产生的弯曲应力f1。在这种情况下,梢端部分102b与第一管状构件74的外周表面彼此接触的部分成为弯曲应力f1的作用点c1。在作用点c1处,弯曲应力f1沿第一方向作用,第一方向是与梢端部分102b延伸的方向正交的方向。因此,在第一支承孔91中,第一管状构件74通过其外周表面被压靠于位于主驱动齿轮52侧的弧形部分91a以及位于与第二支承孔92分离开、也就是说与作用点c1分离开的一侧的线性部分91b的内周表面。
72.在这种情况下,第一管状构件74在第一支承孔91中的间隙范围内操作的同时在第二方向上操作,第二方向是有助于减小第一从动齿轮53与主驱动齿轮52之间产生的齿隙的方向。第二方向与第一管状构件74和第一从动齿轮53一起在第一支承孔91中沿第一支承孔91延伸的方向操作的方向一致。此外,第一管状构件74在第一支承孔91中的间隙范围内操作的同时在第三方向上操作,第三方向是与第二方向正交的方向。第三方向是接近两个线性部分91b中的与作用点c1分离开的线性部分91b的方向,并且第三方向与大致正交于线性部分91b的方向一致。也就是说,在本实施方式中,弯曲应力f1作用的第一方向与作为有助于减小第一从动齿轮53与主驱动齿轮52之间产生的齿隙的方向的第二方向不同。
73.这同样适用于第二臂部分103,并且梢端部分103b与第二管状构件84的外周表面彼此接触的部分成为弯曲应力f2的作用点c2。在作用点c2处,弯曲应力f2沿第一方向作用,第一方向是与梢端部分103b延伸的方向正交的方向。在第二支承孔92中,第二管状构件84通过其外周表面被压靠于位于主驱动齿轮52侧的弧形部分92a以及线性部分92b的位于与第一支承孔91分离开的一侧、也就是说与作用点c2分离开的一侧的内周表面。在这种情况下,第二管状构件84在第二方向和第三方向上操作,第二方向是有助于减小第二从动齿轮54与主驱动齿轮52之间产生的齿隙的方向,第三方向是与第二方向正交的方向。也就是说,在本实施方式中,弯曲应力f2作用的第一方向与作为有助于减小第二从动齿轮54与主驱动齿轮52之间产生的齿隙的方向的第二方向不同。
74.在本实施方式中,如图6中所示,由第一从动齿轮53与偏置构件100之间的相互位置关系获得的作用点c1的位置基于多个参数进行调节,这些参数包括梢端部分102b与第一管状构件74接触的位置以及由弯曲应力f相对于基于该位置、也就是说基于第一方向指定的第二方向形成的角度θ1。
75.在本实施方式中,例如,梢端部分102b与第一管状构件74接触的位置被构造成位于第二支承孔92侧,也就是说,关于通过将使第一管状构件74的轴线和主驱动齿轮52的轴线彼此连接的线段延伸而获得的虚拟线l5位于线圈部分101侧,也就是说,在径向方向上位于第一管状构件74的外侧。也就是说,梢端部分102b在位于第二从动齿轮54侧的部分处与第一管状构件74接触,第二从动齿轮54侧是待偏置的第一从动齿轮53的另一侧。
76.以这种方式,根据以下观点对作用点c1的位置进行调节:弯曲应力f1起作用,第一管状构件74在第一支承孔91中被压靠于位于主驱动齿轮52侧的弧形部分92a的内周表面,并且可以获得作为用于减小第一从动齿轮53与主驱动齿轮52之间产生的齿隙的力的足够的量值。此外,根据以下观点对作用点c1的位置进行调节:弯曲应力f1起作用,在第一支承孔91中第一管状构件74被压靠于位于与第二支承孔92分离开、也就是说与作用点c1分离开
的一侧的线性部分91b的内周表面,并且可以获得用于限制第一从动齿轮53在间隙范围内的操作的力的足够的量值。作为用于限制第一从动齿轮53在间隙范围内的操作的力的足够的量值是通过实验针对以下量值获得的:该量值即使在主驱动齿轮52旋转时也能够维持第一从动齿轮53被压向第一支承孔91的内周表面的状态。在这种实验及类似实验中,要求由第一方向相对于第二方向形成的角度θ1例如为适当的值,使得角度θ1是“10
°”
或更大,并且更优选地是“20
°”
或更大。这也适用于作用点c2的位置。也就是说,根据以下观点对作用点c2的位置进行调节:弯曲应力f2起作用,并且可以获得作为减小第二从动齿轮54与主驱动齿轮52之间产生的齿隙的力以及限制第二从动齿轮54在主驱动齿轮52的周向方向上操作的力的足够的量值。
77.在下文中,将描述本实施方式的操作。在本实施方式中,如图7中所示,作为在偏置构件100使第一从动齿轮53偏置时被施加并且沿第一方向作用的力的弯曲应力f1可以分解成分力f12和分力f13,分力f12是沿第二方向作用的力,分力f13是沿与第二方向正交的方向作用的力。换句话说,沿第一方向作用的弯曲应力f1是沿第二方向作用的分力f12与沿第三方向作用的分力f13的合力。
78.在这种情况下,第一管状构件74由于分力f12的作用而在第一支承孔91中被压靠于位于主驱动齿轮52侧的弧形部分92a的内周表面,使得第一从动齿轮53被压向主驱动齿轮52。因此,在弯曲应力f1作用的同时,减小了第一从动齿轮53与主驱动齿轮52之间产生的齿隙。
79.此外,由于分力f13的作用,第一管状构件74在第一支承孔91中被压靠于位于与第二支承孔92分离开的一侧的线性部分91b的内周表面,使得第一轴部分72被压向第一支承孔91的内周表面。因此,在弯曲应力f1作用的同时,第一从动齿轮53在间隙范围内、例如在周向方向上的操作受到限制。也就是说,即使在主驱动齿轮52旋转时,第一从动齿轮53的操作也受到限制。
80.在下文中,将描述本发明的效果。在本实施方式中,弯曲应力f1作用的第一方向与作为有助于减小第二从动齿轮54与主驱动齿轮52之间产生的齿隙的方向的第二方向不同。在这种情况下,在确保分力f12的同时,也可以确保分力f13。因此,第一从动齿轮53的第一轴部分72相对于对应的第一磁传感器62的位置由于第一从动齿轮53的轴线的偏移而发生的变化被抑制,并且可以抑制第一磁传感器62的检测结果的准确度的变化。这也适用于第二从动齿轮54,并且可以抑制对应的第二磁传感器63的检测结果的准确度的变化。
81.如图8中所示,与其中弯曲应力f1作用的第一方向与作为有助于减小第一从动齿轮53与主驱动齿轮52之间产生的齿隙的方向的第二方向一致的比较示例相比,本实施方式的效果显著。在这样的比较示例中,不存在本实施方式的分力f12和f13。
82.在本实施方式中,根据以下观点对第一从动齿轮53与偏置构件100之间的位置关系进行调节:弯曲应力f1起作用,并且可以获得作为用于减小第一从动齿轮53与主驱动齿轮52之间产生的齿隙的力以及用于限制第一从动齿轮53在主驱动齿轮52的周向方向上操作的力中的每个力的足够的量值。也就是说,通过调节第一从动齿轮53和偏置构件100的位置而调节分力f12和f13中的每一者,使得在确保足够的量值作为分力f13的同时抑制分力f12的不必要的增加。这也适用于第二从动齿轮54和偏置构件100相对于彼此的位置。
83.在本实施方式中,第一从动齿轮53和偏置构件100相对于具有沿第二方向延伸的
长形形状的第一支承孔91之间的位置关系被调节成使得作为分力f13作用的方向的第三方向大致正交于两个线性部分91b中的与作用点c1分离开的线性部分91b。
84.在这种情况下,如图7中所示,在第一支承孔91的两个线性部分91b中的与作用点c1分离开的线性部分91b中产生由分力f13引起的反作用力f14。在第一轴部分72被压向第一支承孔91的内周表面的状态下,反作用力f14在限定产生在第一支承孔91的内周表面与第一轴部分72的外周表面之间的摩擦力时作为法向力产生。因此,可以适当地维持第一轴部分72被压向第一支承孔91的内周表面的状态。这也适用于第二从动齿轮54和偏置构件100相对于彼此的位置,并且可以优选地维持第二轴部分82被压向第二支承孔92的内周表面的状态。
85.在本实施方式中,采用下述扭力螺旋弹簧作为偏置构件100:该扭力螺旋弹簧具有线圈部分101并且构造成使得臂部分102、103从线圈部分101的两个端部沿不同方向延伸。在这种情况下,可以设置一个构件作为用于从动齿轮53、54中的每一者的偏置构件100。因此,在传感器装置24中,可以抑制零件数量的增加。
86.在本实施方式中,在偏置构件100中,第一臂部分102的梢端部分102b和第二臂部分103的梢端部分103b与从动齿轮53的轴部分72和从动齿轮54的轴部分82的位于从动齿轮侧的待偏置的部分接触,从动齿轮侧是待偏置的从动齿轮53、54的另一侧。在这种情况下,当偏置构件100使从动齿轮53、54朝向主驱动齿轮52偏置时,第一方向变得与第二方向不同。因此,即使在支承构件55应该在关于虚拟线l2与设置有主驱动齿轮52的一侧相反的一侧支承线圈部分101的本实施方式中,也可以在传感器装置24中实现下述构型:在该构型中,即使在主驱动齿轮52旋转时,从动齿轮53、54中的每一者的操作也可以受到限制。
87.在本实施方式中,由于设置了管状构件74、84,特别地,偏置构件100被构造成使得梢端部分102b、103b不与轴部分72、82直接接触。因此,可以抑制由梢端部分102b、103b的直接接触引起的轴部分72、82的磨损。
88.实施方式可以进行如下改型。此外,以下的其他实施方式可以在各实施方式在技术上一致的程度上彼此组合。管状构件74、84中的每一者可以被删除。也就是说,偏置构件100的梢端部分102b、103b与轴部分72、82直接接触,并且直接接触点是作用点c1和c2的弯曲应力f1、f2直接作用于从动齿轮53、54。在这种情况下,关于管状构件74、84中的每一者所拥有的磁屏蔽的功能,例如,可以在支承孔91、92中的每一者的内周表面或轴部分72、82中的每一者的外周表面上安装类似于管状构件74、84中的每一者的能够阻挡磁性的金属材料。
89.管状构件74、84中的每一者可以由能够阻挡磁性的金属材料制成,但是也可以由例如树脂材料制成。也就是说,管状构件74、84中的每一者仅具有作为支承轴部分72、82中的每一者的旋转的轴承的功能。在这种情况下,关于管状构件74、84中的每一者所拥有的磁屏蔽的功能,例如,可以在支承孔91、92中的每一者的内周表面或轴部分72、82中的每一者的外周表面上安装类似于管状构件74、84中的每一者的能够阻挡磁性的金属材料。
90.在偏置构件100中,如果由于弯曲应力f1的作用可以获得减小第一从动齿轮53与主驱动齿轮52之间产生的齿隙的力和限制第一从动齿轮53在主驱动齿轮52的周向方向上的操作的力中的每个力以具有足够的量值,作用点c1的位置可以适当地改变。也就是说,梢端部分102b与第一管状构件74接触的位置以及由弯曲应力f1相对于基于该位置、也就是说
基于第一方向认定的第二方向形成的角度θ1可以适当地改变。这也适用于弯曲应力f2,也就是说,也适用于作用点c2的位置。
91.例如,如图9中所示,在偏置构件100中,只要满足第一方向和第二方向彼此不同的要求,臂部分102、103的形状可以适当地改变。在这种情况下,偏置构件100的臂部分112和113关于虚拟线l2从线圈部分111的两个端部向设置有主驱动齿轮52的一侧延伸。臂部分112、113具有从线圈部分111延伸成在周向方向上彼此分离开的基部端部部分112a和113a以及从基部端部部分112a、113a延伸成在周向方向上彼此接近的梢端部分112b、113b。此外,梢端部分112b和113b的梢端构造成位于最靠近主驱动齿轮52的位置。此外,连接部分112c和113c构造成在臂部分112和113中定位成在周向方向上彼此相距最远。
92.例如,如图10中所示,在偏置构件100中,如果可以满足第一方向和第二方向彼此不同的要求,并且无需关于虚拟线l2将线圈部分101支承在与设置有主驱动齿轮52的一侧相反的一侧,则臂部分102、103的形状可以适当地改变。在这种情况下,线圈支承部分570被构造成相对于上述实施方式的线圈支承部分57定位成关于虚拟线l2沿着虚拟线l4向设置有主驱动齿轮52的一侧偏移。然后,偏置构件100的臂部分122和123关于虚拟线l2从线圈部分121的两个端部向与设置有主驱动齿轮52的一侧相反的一侧延伸。臂部分122和123从线圈部分121延伸成在周向方向上彼此分离开。
93.例如,如图11中所示,在偏置构件100中,如果可以满足第一方向和第二方向彼此不同的要求,并且需要关于虚拟线l2将线圈部分101最远地支承在与设置有主驱动齿轮52的一侧相反的一侧,则臂部分132和133的形状可以适当地改变。在这种情况下,线圈支承部分580被构造成相对于上述实施方式的线圈支承部分57定位成关于虚拟线l2沿着虚拟线l4在与设置有主驱动齿轮52的一侧相反的更远侧偏移。然后,偏置构件100的臂部分132和133关于虚拟线l2从线圈部分131的两个端部向设置有主驱动齿轮52的一侧延伸。臂部分132和133从线圈部分131延伸成在周向方向上彼此分离开。在这种情况下,例如,第一臂部分132与第一管状构件74接触的位置构造成处于与第二支承孔92相反的一侧,也就是说,关于虚拟线l5处于与线圈部分131相反的一侧,也就是说,在径向方向上处于第一管状构件74的外侧。也就是说,第一臂部分132与第一管状构件74的处于与第二从动齿轮54侧相反的一侧的部分接触,第二从动齿轮54侧是待偏置的第一从动齿轮53的另一侧。这也适用于第二管状构件84,也就是说,也适用于第二臂部分133。
94.例如,如图12中所示,在支承构件55中,第一支承孔91延伸的方向可以适当地改变。在这种情况下,第一支承孔91延伸成与实施方式的虚拟线l5相交。这也适用于第二支承孔92。
95.当沿第一小齿轮轴13的轴向方向观察时,支承孔91、92可以具有圆孔形状。虽然可以使用扭力螺旋弹簧作为偏置构件100,但也可以使用板簧、另一螺旋弹簧等。
96.偏置构件100可以构造为使从动齿轮53、54中的每一者单独偏置的偏置构件。传感器壳体31可以构造成具有支承从动齿轮53、54的功能和支承偏置构件100的功能。在这种情况下,传感器壳体31用作支承构件。
97.在传感器装置24中,设置有从动齿轮53、54,但是从动齿轮的数量可以适当地改变。在这种情况下,在支承构件55和偏置构件100中,支承孔和臂部分的数量可以根据从动齿轮的数量而改变。例如,可以存在单个从动齿轮。即使具有这样的构型,当值在360度以内
时,也可以检测到旋转角度。在这种情况下,支承构件55和偏置构件100可以仅具有单个支承孔和臂部分。
98.在传感器装置24中,扭矩传感器装置41的构型可以被删除。可以使用霍尔传感器作为磁传感器46、47、62、63,但是也可以使用磁阻传感器。
99.安装有传感器装置24的转向装置10可以是将马达的扭矩作为辅助力施加至转向轴12的电动助力转向装置。此外,转向装置10可以是线控转向型转向装置,在线控转向型转向装置中,连接至方向盘11的转向部与通过根据转向部的转向输入操作变向轴14而使变向轮16变向的变向部之间的动力传输被分离。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1