一种高温激光3D轮廓传感器的制作方法
一种高温激光3d轮廓传感器
技术领域
1.本实用新型涉及一种轮廓传感器,具体是一种高温激光3d轮廓传感器。
背景技术:
2.基于三角法的线结构光技术具有模型简单,不产生光条混淆,易于实现等优点,广泛应用于传动带上零件的检测,被测物体表面特定轮廓的测量等。使用线结构光法,在被测区域投射一高对比度的光条,使用面阵ccd摄像机接收散射光,从而获得表面被照明区域的截面形状或轮廓。因此,我们将用线结构光技术实现的传感器称为轮廓传感器。现有的轮廓传感器需要在较高温度的环境去使用,其本身工作也会产生一定的热量,如果热量不能得到及时的疏散,会造成传感器使用寿命的缩短。因此,本实用新型提供了一种高温激光3d轮廓传感器,以解决上述提出的问题。
技术实现要素:
3.本实用新型的目的在于提供一种高温激光3d轮廓传感器,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种高温激光d轮廓传感器,包括壳体,所述壳体后方设置壳盖,壳盖内开设若干个通孔;
6.壳体内设置过滤网,壳体内设置固定板,且固定板位于过滤网前方,固定板内中部开设若干个散热孔;
7.固定板内设置若干个转轴,转轴纵向设置,且转轴和固定板转动连接,转轴前端安装扇叶,转轴后端伞齿轮一;
8.固定板和过滤网之间设置转动杆,转动杆左端转动连接壳体内壁,转动杆右端安装电机,转动杆外套设若干个伞齿轮二,且伞齿轮二和伞齿轮一啮合;
9.转动杆外套设皮带轮一,过滤网后方设置螺纹杆,且螺纹杆两端分别转动连接壳体内壁,螺纹杆外套设刷子杆,刷子杆和螺纹杆螺纹连接,且刷子杆和过滤网接触;
10.螺纹杆外套设皮带轮二,皮带轮一和皮带轮二外共套设传动皮带。
11.作为本实用新型进一步的方案,所述壳体后端对称开设插槽,插槽内壁设置移动卡块,移动卡块一端安装弹簧一。
12.作为本实用新型再进一步的方案,所述壳体内设置传感器。
13.作为本实用新型再进一步的方案,所述壳盖前端对称安装固定卡块。
14.作为本实用新型再进一步的方案,所述壳体左右两侧对称设置收集罩,壳体左右两端对应收集罩的位置开设连接孔,且连接孔对应刷子杆。
15.作为本实用新型再进一步的方案,所述收集罩上下两端对称设置l形板,壳体左右两端对称安装连接板,连接板一端开设卡槽。
16.作为本实用新型再进一步的方案,所述l形板内设置拉杆,拉杆靠近卡槽一端安装
卡块,拉杆外套设弹簧二。
17.与现有技术相比,本实用新型的有益效果是:
18.本实用新型通过电机带动扇叶转动,通过散热孔、过滤网和通孔对传感器进行散热,同时通过过滤网阻止灰尘的入侵,保证传感器的使用寿命,同时转动杆刷子杆进行移动,刷子杆对过滤网表面进行清理,将灰尘清理走,防止过滤网被灰尘堵塞住。
附图说明
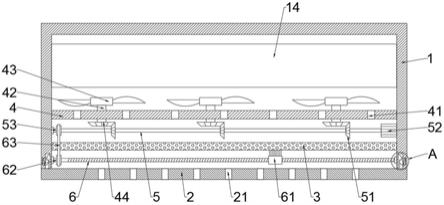
19.图1为一种高温激光3d轮廓传感器实施例1的结构示意图。
20.图2为一种高温激光3d轮廓传感器实施例1中壳体的结构示意图。
21.图3为一种高温激光3d轮廓传感器实施例1中图2中a处的放大图。
22.图4为一种高温激光3d轮廓传感器实施例2的结构示意图。
23.图5为一种高温激光3d轮廓传感器实施例2中图4中b处的放大图。
24.图中:1、壳体;11、插槽;12、移动卡块;13、弹簧一;14、传感器;2、壳盖;21、通孔;22、固定卡块;3、过滤网;4、固定板;41、散热孔;42、转轴;43、扇叶;44、伞齿轮一;5、转动杆;51、伞齿轮二;52、电机;53、皮带轮一;6、螺纹杆;61、刷子杆;62、皮带轮二;63、传动皮带;7、收集罩;71、l形板;72、卡块;73、拉杆;74、弹簧二;8、连接板;81、卡槽。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.实施例1
27.请参阅图1~3,一种高温激光3d轮廓传感器,包括壳体1,所述壳体1后方设置壳盖2,壳盖2内开设若干个通孔21,壳体1后端对称开设插槽11,插槽11内壁设置移动卡块12,移动卡块12一端安装弹簧一13,壳盖2前端对称安装固定卡块22,壳体1内设置传感器14,壳体1内设置过滤网3,壳体1内设置固定板4,且固定板4位于过滤网3前方,固定板4内中部开设若干个散热孔41,固定板4内设置若干个转轴42,转轴42纵向设置,且转轴42和固定板4转动连接,转轴42前端安装扇叶43,转轴42后端伞齿轮一44,固定板4和过滤网3之间设置转动杆5,转动杆5左端转动连接壳体1内壁,转动杆5右端安装电机52,转动杆5外套设若干个伞齿轮二51,且伞齿轮二51和伞齿轮一44啮合,转动杆5外套设皮带轮一53,过滤网3后方设置螺纹杆6,且螺纹杆6两端分别转动连接壳体1内壁,螺纹杆6外套设刷子杆61,刷子杆61和螺纹杆6螺纹连接,且刷子杆61和过滤网3接触,螺纹杆6外套设皮带轮二62,皮带轮一53和皮带轮二62外共套设传动皮带63。
28.本实用新型的工作原理是:电机52带动转动杆5转动,转动杆5通过伞齿轮二51和伞齿轮一44啮合传动带动转轴42转动,转轴42带动扇叶43转动,通过散热孔41、过滤网3和通孔21对传感器14进行散热,同时通过过滤网3阻止灰尘的入侵,同时转动杆5通过皮带轮一53、传动皮带63和皮带轮二62带动螺纹杆6转动,螺纹杆6带动刷子杆61进行移动,刷子杆61对过滤网3表面进行清理,将灰尘清理走,防止过滤网3被灰尘堵塞住。
29.实施例2
30.请参阅图4~5,与实施例1区别在于,所述壳体1左右两侧对称设置收集罩7,壳体1左右两端对应收集罩7的位置开设连接孔,且连接孔对应刷子杆61,收集罩7上下两端对称设置l形板71,壳体1左右两端对称安装连接板8,连接板8一端开设卡槽81,l形板71内设置拉杆73,拉杆73靠近卡槽81一端安装卡块72,拉杆73外套设弹簧二74,通过拉杆73拉动卡块72,弹簧二74被压缩,将收集罩7贴近壳体1,放开拉杆73,通过弹簧二74的推力使卡块72插进卡槽81内,方便收集刷子杆61刷下来的灰尘。
31.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种高温激光3d轮廓传感器,包括壳体(1),其特征在于,所述壳体(1)后方设置壳盖(2),壳盖(2)内开设若干个通孔(21);壳体(1)内设置过滤网(3),壳体(1)内设置固定板(4),且固定板(4)位于过滤网(3)前方,固定板(4)内中部开设若干个散热孔(41);固定板(4)内设置若干个转轴(42),转轴(42)纵向设置,且转轴(42)和固定板(4)转动连接,转轴(42)前端安装扇叶(43),转轴(42)后端伞齿轮一(44);固定板(4)和过滤网(3)之间设置转动杆(5),转动杆(5)左端转动连接壳体(1)内壁,转动杆(5)右端安装电机(52),转动杆(5)外套设若干个伞齿轮二(51),且伞齿轮二(51)和伞齿轮一(44)啮合;转动杆(5)外套设皮带轮一(53),过滤网(3)后方设置螺纹杆(6),且螺纹杆(6)两端分别转动连接壳体(1)内壁,螺纹杆(6)外套设刷子杆(61),刷子杆(61)和螺纹杆(6)螺纹连接,且刷子杆(61)和过滤网(3)接触;螺纹杆(6)外套设皮带轮二(62),皮带轮一(53)和皮带轮二(62)外共套设传动皮带(63)。2.根据权利要求1所述的一种高温激光3d轮廓传感器,其特征在于,所述壳体(1)后端对称开设插槽(11),插槽(11)内壁设置移动卡块(12),移动卡块(12)一端安装弹簧一(13)。3.根据权利要求1所述的一种高温激光3d轮廓传感器,其特征在于,所述壳体(1)内设置传感器(14)。4.根据权利要求1所述的一种高温激光3d轮廓传感器,其特征在于,所述壳盖(2)前端对称安装固定卡块(22)。5.根据权利要求1所述的一种高温激光3d轮廓传感器,其特征在于,所述壳体(1)左右两侧对称设置收集罩(7),壳体(1)左右两端对应收集罩(7)的位置开设连接孔,且连接孔对应刷子杆(61)。6.根据权利要求5所述的一种高温激光3d轮廓传感器,其特征在于,所述收集罩(7)上下两端对称设置l形板(71),壳体(1)左右两端对称安装连接板(8),连接板(8)一端开设卡槽(81)。7.根据权利要求6所述的一种高温激光3d轮廓传感器,其特征在于,所述l形板(71)内设置拉杆(73),拉杆(73)靠近卡槽(81)一端安装卡块(72),拉杆(73)外套设弹簧二(74)。
技术总结
本实用新型公开了一种高温激光3D轮廓传感器,包括壳体,所述壳体后方设置壳盖,壳盖内开设若干个通孔,壳体内设置过滤网,壳体内设置固定板,且固定板位于过滤网前方,固定板内中部开设若干个散热孔,固定板内设置若干个转轴,转轴纵向设置,且转轴和固定板转动连接,转轴前端安装扇叶,转轴后端伞齿轮一,固定板和过滤网之间设置转动杆,转动杆左端转动连接壳体内壁,转动杆右端安装电机,转动杆外套设若干个伞齿轮二,且伞齿轮二和伞齿轮一啮合。本实用新型通过电机带动扇叶转动,通过散热孔、过滤网和通孔对传感器进行散热,同时通过过滤网阻止灰尘的入侵,保证传感器的使用寿命。保证传感器的使用寿命。保证传感器的使用寿命。
技术研发人员:滕国兴
受保护的技术使用者:广东鑫兴林科技有限公司
技术研发日:2021.04.28
技术公布日:2022/1/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1