一种医疗机器人用传感器的制作方法
1.本实用新型涉及传感器技术领域,特别是涉及一种医疗机器人用传感器。
背景技术:
2.癌症被人类视为死神,但其也不是不可战胜。随着社会的进步,医学的快速发展,人类正在逐渐战胜这个病魔。而在此过程中,更加高端的,智能的医疗设备起着举足轻重的作用。目前肺癌手术基本都是有资深医生操刀,各个科室相互协作,各种仪器设备加以辅助。医生基本凭借着多年的工作经验进行着一步又一步的操作,其过程中没有机器人一样的设备给予具体数据上的支持,不能防错或者给予提醒。
技术实现要素:
3.本实用新型的目的在于提供一种医疗机器人用传感器,以克服现有技术的不足。
4.为达到上述目的,本实用新型的技术方案如下:
5.本实用新型公开了一种医疗机器人用传感器,包括弹性体、应变计、fpcb和电缆组件,所述fpcb分别电连接所述应变计和电缆组件,所述应变计和fpcb设置在所述弹性体上,所述弹性体采用双孔平行梁结构,所述弹性体上设置有用于将其安装在医疗机器人上的螺纹安装孔和连接孔,所述连接孔内设置有用于与医疗机器人的机械臂连接的连杆。
6.优选的,所述弹性体上靠近所述螺纹安装孔的位置开始有用于去除安装应力的缺口。
7.进一步优选的,所述螺纹安装孔和连接孔分别设置于所述弹性体的两端部。
8.进一步优选的,所述缺口采用设置于所述弹性体的下端面上的开口向下的弧形凹槽。
9.优选的,还包括数字放大器,所述数字放大器与所述电缆组件连接。
10.优选的,所述弹性体的材质采用铝合金。
11.优选的,所述应变计、fpcb通过硅胶密封在所述弹性体的应变区。
12.优选的,所述弹性体长为25~35mm,宽为5~11mm,高为5~11mm。
13.与现有技术相比,本实用新型的优点在于:
14.1)本实用新型所提供的医疗机器人用传感器用于手术机器人,与机器人机械臂连接,当机械臂运动时,传感器信号即发生变化,实时监测着机械手臂的受力情况,能够给医护人员提供更精确、更定向的数据支持,帮助医生更好地完成手术;
15.2)本实用新型所提供的医疗机器人用传感器,结构简单、小巧,不占用空间;
16.3)本实用新型提供的弹性体的材料采用铝合金,既保证了扭矩要求,又可以实现传感器的轻量化。
17.4)本实用新型提供采用高精度的应变计,保证传感器本身的精度;
18.5)本实用新型所提供的传感器密封性好,稳定性强,防水性以及防腐性好。
附图说明
19.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍。
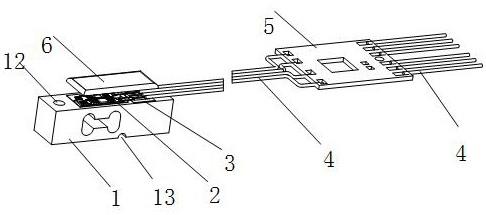
20.图1为本实用新型实施例所公开的医疗机器人用传感器的结构示意图;
21.图2为本实用新型实施例所公开的医疗机器人用传感器的主视图。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
23.参见图1-2所示,本实用新型实施例公开了一种医疗机器人用传感器,包括弹性体1、应变计2、fpcb3和电缆组件4,fpcb3分别电连接应变计2和电缆组件4,应变计2和fpcb3设置在弹性体1上,弹性体1采用双孔平行梁结构,弹性体1上设置有用于将其安装在医疗机器人上的螺纹安装孔11和连接孔12,连接孔12内设置有用于与医疗机器人的机械臂连接的连杆。
24.本实用新型实施例所提供的医疗机器人用传感器用于手术机器人,与机器人机械臂连接,当机械臂运动时,传感器信号即发生变化,实时监测着机械手臂的受力情况,能够给医护人员提供更精确、更定向的数据支持,帮助医生更好地完成手术。
25.优选的,弹性体1上靠近螺纹安装孔11的位置开始有用于去除安装应力的缺口13。
26.进一步优选的,螺纹安装孔11和连接孔12分别设置于弹性体1的两端部。缺口13采用设置于弹性体1的下端面上的开口向下的弧形凹槽。
27.优选的,该医疗机器人用传感器还包括数字放大器5,数字放大器5与电缆组件4连接。
28.优选的,弹性体1的材料采用铝合金,既保证了扭矩要求,又可以实现传感器的轻量化。
29.应变计2、fpcb3通过硅胶6密封在弹性体1的应变区。通过硅胶密封,传感器密封性好,稳定性强,防水性以及防腐性好。
30.优选的,弹性体1长为25~35mm,宽为5~11mm,高为5~11mm。结构简单、小巧,不占用空间。更为优选的,弹性体1长为30mm,宽为8mm,高为8mm,但并不限于此。
31.该医疗机器人用传感器在工作时,手术机器人的机械臂动作,传感器因为受力产生变形,应变计2感应到变形后会通过惠斯通电桥把模拟信号传送给数字放大器5,数字放大器5把接受到的模拟信号通过放大处理产生数字信号,数字信号通过电缆线传输给医疗机器人的数字采集系统。
32.对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
技术特征:
1.一种医疗机器人用传感器,其特征在于:包括弹性体、应变计、fpcb和电缆组件,所述fpcb分别电连接所述应变计和电缆组件,所述应变计和fpcb设置在所述弹性体上,所述弹性体采用双孔平行梁结构,所述弹性体上设置有用于将其安装在医疗机器人上的螺纹安装孔和连接孔,所述连接孔内设置有用于与医疗机器人的机械臂连接的连杆。2.根据权利要求1所述的一种医疗机器人用传感器,其特征在于:所述弹性体上靠近所述螺纹安装孔的位置开始有用于去除安装应力的缺口。3.根据权利要求2所述的一种医疗机器人用传感器,其特征在于:所述螺纹安装孔和连接孔分别设置于所述弹性体的两端部。4.根据权利要求3所述的一种医疗机器人用传感器,其特征在于:所述缺口采用设置于所述弹性体的下端面上的开口向下的弧形凹槽。5.根据权利要求1所述的一种医疗机器人用传感器,其特征在于:还包括数字放大器,所述数字放大器与所述电缆组件连接。6.根据权利要求1所述的一种医疗机器人用传感器,其特征在于:所述弹性体的材质采用铝合金。7.根据权利要求1所述的一种医疗机器人用传感器,其特征在于:所述应变计、fpcb通过硅胶密封在所述弹性体的应变区。8.根据权利要求1所述的一种医疗机器人用传感器,其特征在于:所述弹性体长为25~35mm,宽为5~11mm,高为5~11mm。
技术总结
本实用新型提供了一种医疗机器人用传感器,包括弹性体、应变计、FPCB和电缆组件,所述FPCB分别电连接所述应变计和电缆组件,所述应变计和FPCB设置在所述弹性体上,所述弹性体采用双孔平行梁结构,所述弹性体上设置有用于将其安装在医疗机器人上的螺纹安装孔和连接孔,所述连接孔内设置有用于与医疗机器人的机械臂连接的连杆。本实用新型所提供的医疗机器人用传感器用于手术机器人,与机器人机械臂连接,当机械臂运动时,传感器信号即发生变化,实时监测着机械手臂的受力情况,能够给医护人员提供更精确、更定向的数据支持,帮助医生更好地完成手术。地完成手术。地完成手术。
技术研发人员:胡元凯
受保护的技术使用者:霍丁格必凯(苏州)电子测量技术有限公司
技术研发日:2021.08.04
技术公布日:2022/2/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1