一种带挠性支撑结构的星载多普勒差分干涉仪
1.本发明涉及一种多普勒差分干涉仪,具体涉及一种带挠性支撑结构的星载多普勒差分干涉仪。
背景技术:
2.中高层大气(30-300km高度范围)包括低热层、中间层和平流层,是研究大气科学的重要内容之一,也是表征大气动力学特性的重要参数之一,同时也是影响大气热学结构、动力学特性、物质与能量分布的重要因素之一。多普勒空间差分干涉技术作为一种被动风场探测技术体制,利用大气成分随大气运动时,其特征光谱会出现多普勒频移效应,谱线频移量与大气运动速度有关,通过测量干涉图位置或相位等信息可以反演大气风场。
3.针对不同的探测高度需选择不同的探测源,而不同的探测源要求不同的多普勒差分干涉仪的光谱分辨率。调整光谱分辨率δσ,可通过调整光栅的有效宽度w和littorow角θ
l
达成干涉仪的不同分辨率要求。其中θ
l
是由光栅的刻线密度和littorow波长决定的,不能随意改变,因此,若需要提高光谱分辨率,可通过增加光栅的有效宽度w,但此会导致多普勒差分干涉仪尺寸和质量变大,δσ为:
[0004][0005]
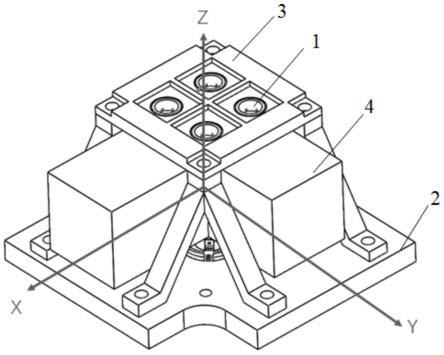
多普勒差分干涉仪刚性固定采用胶粘方式,通过刚性连接提高干涉仪组件固有频率的方法,保证干涉仪高力学稳定性。如图1至图4所示,差分干涉仪组件由光学件和结构件组成,光学件包括分光棱镜、视场棱镜、光栅、间隔元件、间隔元件等,结构件包括底座、盖板、四根斜筋。分光棱镜与底座凸台采用环氧胶粘接,底座和盖板与斜筋之间分别采用螺钉连接。底座和盖板采用与光学件材料的热膨胀系数匹配的结构材料。
[0006]
由于差分干涉仪的光谱分辨率提高,导致光学件尺寸增大。若采用刚性固定方式,由可知,为保证干涉仪的高力学稳定性固定,需要提高组件的刚度,即增加胶粘面积。这会增加热传导,导致组件热稳定性降低、及影响光学面形保证等问题,二者相互矛盾,难以解决。
技术实现要素:
[0007]
本发明目的是解决现有差分干涉仪采用刚性固定会增加热传导,导致组件热稳定性降低以及影响光学面形等技术问题,而提供一种带挠性支撑结构的星载多普勒差分干涉仪。
[0008]
本发明的技术解决方案:
[0009]
一种带挠性支撑结构的星载多普勒差分干涉仪,包括多普勒差分干涉仪、分别设置在差分干涉仪两端的底座和盖板、两组凸台柔节单元和用于连接底座和盖板的连接单元,其特殊之处在于:
[0010]
所述底座和盖板上均设置有与分光棱镜接触面相适配的安装槽,两组凸台柔节单元分別位于安装槽内,且安装槽的安装面为水平面;
[0011]
每组凸台柔节单元包括多个设置在安装槽内的凸台柔节模块;
[0012]
所述凸台柔节模块包括圆柱状的复合柔节、环状固定框架以及连接在复合柔节和环状固定框架之间的四个均布的柔节;
[0013]
所述复合柔节内端设置有第一切口型柔性铰链和第二切口型柔性铰链,用于分别提供多普勒差分干涉仪绕y轴和x轴的转动自由度;每个柔节上设置有平行于z轴的两个分别开口于两侧的外切缝和一个全封闭的内切缝,所述内切缝和两个外切缝呈品字形分布且相互间凹凸配合,用于提供多多普勒差分干涉仪绕z轴的转动自由度;
[0014]
任一轴线的两个柔节与x轴的夹角均为45
°
;
[0015]
每组凸台柔节单元的所有复合柔节的内端面形成与分光棱镜端面粘接的粘接面,粘接面与柔节的内表面及外表面分别平行;
[0016]
所述复合柔节、环状固定框架以及柔节均采用与光学件材料的热膨胀系数相匹配的材料。
[0017]
进一步地,所述复合柔节侧面沿周向均匀设置有四个螺纹孔;所述柔节远离环状固定框架的一端设置有与复合柔节侧面螺纹孔相对应的圆孔,复合柔节和柔节通过将螺钉依次穿入圆孔和螺纹孔固定连接。
[0018]
进一步地,所述复合柔节外侧端沿轴向设置减重孔。
[0019]
进一步地,所述粘接面与的内表面及外表面的平行度优于0.005mm;所述安装面的平面度为0.01
±
0.005mm。
[0020]
进一步地,所述环状固定框架外围沿周向设置多个连接块,连接块上设置第一圆孔;所述底座和盖板的安装槽内分别设置有与第一圆孔相对应的螺纹孔;所述凸台柔节模块通过螺钉拧入第一圆孔和螺纹孔固定连接在底座或盖板上。
[0021]
进一步地,每组凸台柔节单元包括四个呈田字形设置在安装槽内的凸台柔节模块;所述柔节和连接块均为四个,且柔节和连接块对应设置在环状固定框架的内外侧。
[0022]
进一步地,所述柔节、连接块和环状固定框架为一体件。
[0023]
进一步地,所述底座和所述盖板均采用与光学件材料的热膨胀系数匹配的结构材料。
[0024]
进一步地,所述复合柔节、柔节、环状固定框架、底座和盖板的材料根据以下公式的计算结果,按偏转角度最小且重量最轻的原则进行选择:
[0025]
所述多普勒差分干涉仪4的长臂绕z轴的偏转角度为α:
[0026]
α=arctan(
△
cdy/l
cd
);
[0027]
多普勒差分干涉仪4的长臂绕y轴转动的角度为β:
[0028]
β=arctan(
△
cdz/l
cd
);
[0029]
多普勒差分干涉仪4的短臂绕x轴转动的角度为γ:
[0030]
γ=arctan(
△
aby/l
ab
);
[0031]
多普勒差分干涉仪4的短臂绕y轴转动的角度为δ:
[0032]
δ=arctan(
△
ab
x
/l
ab
);
[0033]
ab为多普勒差分干涉仪的短臂;
[0034]
cd为多普勒差分干涉仪的长臂;
[0035]
△
ijk为i,j两点在k方向的位移变化差;
[0036]
l
ij
为i,j两点的距离。
[0037]
进一步地,所述复合柔节、环状固定框架、底座、盖板和柔节的材料为硬铝合金4j45。
[0038]
本发明的有益效果:
[0039]
1.本发明挠性支撑结构使得在静力学条件下,分光棱镜入射面和出射面光学面形满足要求,优于刚性结构方法,且柔节处的应力远小于材料的许用应力,不会发生塑性变形。
[0040]
2.采用本发明挠性支撑结构承载的多普勒差分干涉仪组件的一阶固有频率为大于卫星对载荷的基频100hz要求。
[0041]
3.本发明挠性支撑结构,在随机振动条件下,柔节处应力范围是远小于许用应力值不会发生塑性变形;不会发生脱胶现象;同时保证光学件最大位移远小于安装间隙不会发生光机间的碰撞。
[0042]
4.本发明挠性支撑结构具有重量轻,热稳定性高,可靠性强的优点。
附图说明
[0043]
图1是现有多普勒差分干涉仪结构示意图一;
[0044]
图2是现有多普勒差分干涉仪结构示意图二;
[0045]
图3是现有多普勒差分干涉仪中底座与凸台结构的连接示意图;
[0046]
图4是现有多普勒差分干涉仪中凸台结构的结构示意图;
[0047]
图5是本发明多普勒差分干涉仪结构示意图;
[0048]
图6是本发明多普勒差分干涉仪中光学件的结构示意图;
[0049]
图7是本发明多普勒差分干涉仪中凸台柔节模块的结构示意图;
[0050]
图8是本发明多普勒差分干涉仪中复合柔节的结构示意图;
[0051]
图9是复合柔节的侧面图;
[0052]
图10是本发明多普勒差分干涉仪中柔节、环状固定框架和连接块的连接示意图;
[0053]
图11是本发明多普勒差分干涉仪中柔节、环状固定框架和连接块的连接示意图及局部放大图;
[0054]
图12是图7的俯视图;
[0055]
图13是本发明多普勒差分干涉仪中凸台柔节单元与底座的连接示意图;
[0056]
图14是本发明多普勒差分干涉仪中底座的结构示意图;
[0057]
图15是本发明多普勒差分干涉仪中底座与多普勒差分干涉仪的安装示意图。
[0058]
附图标记:1-凸台柔节模块,11-复合柔节,111-第一切口型柔性铰链,112-第二切口型柔性铰链,113-螺纹孔,114-减重孔,121-外切缝,122-内切缝,123-圆孔,124-第一圆孔,125-环状固定框架,126-柔节,2-底座,21-安装槽,3-盖板,4-多普勒差分干涉仪,41-分光棱镜,6-第一对称轴,7-第二对称轴,8-第三对称轴,9-第四对称轴。
具体实施方式
[0059]
下面通过实施例和附图对本发明进行详细的描述。
[0060]
如图5和图6所示,本发明一种带挠性支撑结构的星载多普勒差分干涉仪,包括多普勒差分干涉仪4、分别设置在差分干涉仪4两端的底座2和盖板3、两组凸台柔节单元和用于连接底座2和盖板3的连接单元。
[0061]
底座2和盖板3上均设置有与分光棱镜41接触面相适配的安装槽21,两组凸台柔节单元分別位于安装槽21内,且安装槽21的安装面为水平面,安装面的平面度为0.01
±
0.005mm;每组凸台柔节单元包括多个设置在安装槽21内的凸台柔节模块1。
[0062]
如图7至图11所示,凸台柔节模块1包括圆柱状的复合柔节11、环状固定框架125以及连接在复合柔节11和环状固定框架125之间的四个均布的柔节126;复合柔节11内端设置有第一切口型柔性铰链111和第二切口型柔性铰链112,用于分别提供多普勒差分干涉仪4绕y轴和x轴的转动自由度;每个柔节126上设置有平行于z轴的两个分别开口于两侧的外切缝121和一个全封闭的内切缝122,所述内切缝和两个外切缝121呈品字形分布且相互间凹凸配合,用于提供多多普勒差分干涉仪4绕z轴的转动自由度;任一轴线的两个柔节126与x轴的夹角均为45
°
;每组凸台柔节单元的所有复合柔节11的内端面形成与分光棱镜41端面粘接的粘接面,粘接面与柔节126的内表面及外表面分别平行,平行度优于0.005mm;复合柔节11侧面沿周向均匀设置有四个螺纹孔113;柔节126远离环状固定框架125的一端设置有与复合柔节11侧面螺纹孔113相对应的圆孔123,复合柔节11和柔节126通过将螺钉依次穿入圆孔123和螺纹孔113固定连接。复合柔节11外侧端沿轴向设置减重孔114。
[0063]
环状固定框架125外围沿周向设置多个连接块,连接块上设置第一圆孔124;底座2和盖板3的安装槽内分别设置有与第一圆孔124相对应的螺纹孔;凸台柔节模块1通过螺钉拧入第一圆孔124和螺纹孔固定连接在底座2或盖板3上。每组凸台柔节单元包括四个呈田字形设置在安装槽21内的凸台柔节模块1;柔节126和连接块均为四个,且柔节126和连接块对应设置在环状固定框架125的内外侧;柔节126、连接块和环状固定框架125为一体件。
[0064]
复合柔节11、环状固定框架125、底座2和盖板3以及柔节126均采用与光学件材料的热膨胀系数相匹配的材料。
[0065]
对刚性固定多普勒差分干涉仪结构模态分析,得出前三阶振型分别是绕y、x、z轴转动。因此,本发明在多普勒干涉仪绕y、x、z轴转动的方向上施加柔节,增加结构阻尼、释放应力、降低力学响应。
[0066]
复合柔节11共有两层:包括第一切口型柔性铰链111和第二切口型柔性铰链112。切口型柔性铰链的宽度d决定复合柔节11的刚度,并保证力学试验过程中,所有的变形均位于第一切口型柔性铰链111和第二切口型柔性铰链112处,如图9所示。
[0067]
第一切口型柔性铰链111提供多普勒干涉仪绕y轴转动自由度,第二切口型柔性铰链112提供多普勒干涉仪绕x轴转动自由度,外切缝121和内切缝122提供多普勒干涉仪绕z轴转动自由度,分别对应刚性安装方法的前三阶振型。
[0068]
如图11所示,每个凸台柔节模块1包括四个柔节126,每个柔节126上包括外切缝121和内切缝122。切缝间隔决定环状固定框架125的刚度,间隔是保证力学试验过程中所有的变形均位于切缝处。
[0069]
如图12所示,复合柔节11有两条对称轴,分别为对称轴6和对称轴7。环状固定框架
125有两条对称轴,分别为对称轴8和对称轴9。对称轴8与对称轴6呈45
°
夹角,对称轴9与对称轴7呈45
°
夹角。
[0070]
如图13所示,四个凸台柔节模块1呈“田”字形分布。
[0071]
如图14和图15所示,凸台柔节单元的装配,需要保证安装面21与复合柔节11的光机粘接面平行,平行度优于0.005mm。。
[0072]
复合柔节11、环状固定框架125、底座2、盖板3和柔节126的材料为硬铝合金4j45,多普勒差分干涉仪4中光学件的分光棱镜41和复合柔节11采用环氧胶粘。盖板2和底座3与凸台柔节单元的安装方式一致。
[0073]
本发明从结构形式和材料两方面开展研究。
[0074]
结构方面:对可见光干涉仪刚性方法进行整机模态分析,确定其模态,随后根据振型结果设计第一切口型柔性铰链111、第二切口型柔性铰链112、外切缝121和内切缝122的摆放位置。为此,建立了刚性结构方法的干涉仪组件模型并对其进行模态分析,前三阶模态结果如表1所示。
[0075]
表1前三阶模态结果
[0076][0077]
基于振型分析结果,可知干涉仪组件的前三阶振型分别是绕y、x、z轴转动;因此,柔性铰链和切缝施加后干涉仪应可绕x、y、z转动,增加结构阻尼,降低响应。
[0078]
本发明中第一切口型柔性铰链111、第二切口型柔性铰链112为双层“工”字形设计,属于切口型柔节,空间上相互正交,第一切口型柔性铰链111、第二切口型柔性铰链112分别提供了绕y轴和x轴的转动自由度,切缝提供了绕z轴转动的自由度。
[0079]
材料方面:
[0080]
以干涉仪在实际使用过程中的热力学条件作为输入,优化干涉仪材料组成。以干涉仪沿x、y、z三轴的偏转角度作为评价标准。
[0081]
复合柔节11、柔节126、环状固定框架125、底座2和盖板3的材料根据以下公式的计算结果,按偏转角度最小且重量最轻的原则进行选择:
[0082]
多普勒差分干涉仪4的长臂绕z轴的偏转角度为α:
[0083]
α=arctan(
△
cdy/l
cd
);
[0084]
多普勒差分干涉仪4的长臂绕y轴转动的角度为β:
[0085]
β=arctan(
△
cdz/l
cd
);
[0086]
多普勒差分干涉仪4的短臂绕x轴转动的角度为γ:
[0087]
γ=arctan(
△
aby/l
ab
);
[0088]
多普勒差分干涉仪4的短臂绕y轴转动的角度为δ:
[0089]
δ=arctan(
△
ab
x
/l
ab
);
[0090]
ab为多普勒差分干涉仪的短臂;
[0091]
cd为多普勒差分干涉仪的长臂;
[0092]
△
ijk为i,j两点在k方向的位移变化差;
[0093]
l
ij
为i,j两点的距离。
[0094]
其中,δcdy为c,d两点在y方向的位移变化差,δcdz为c,d两点在z方向的位移变化差,δaby为a,b两点在y方向的位移变化差,δab
x
为a,b两点在x方向的位移变化差,i
cd
为c,d两点的距离,i
ab
为a,b两点的距离。
[0095]
下面将分别分析三种不同材料的支撑结构对多普勒干涉仪的位移与扭转角的影响,如三种支撑结构的材料组成表2所示。
[0096]
表2支撑结构的材料组成
[0097][0098]
分析结果显示方案2、3的变化相比方案1小,且方案2的重量比方案3大,遂采用方案3,复合柔节11、环状固定框架125、底座2、盖板3和柔节126的材料为硬铝合金4j45。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1