一种用于高速公路巡检的无人机的制作方法
[0001]
本发明涉及一种用于高速公路巡检的无人机。
背景技术:
[0002]
所谓的应急车道是指位于路面行驶方向最右侧、主要用于发生事故或故障时停车以及专为救险所用的车道,也就是人们通常所说的“硬路肩”。
[0003]
高速公路应急车道是专门供工程救险、消防救援、医疗救护或民警执行紧急公务等处理应急事务的车辆使用、任何社会车辆禁止驶入或者以各种理由在车道内停留。
[0004]
近年来,随着车辆保有量的持续上升,道路时常出现拥堵,车辆占用高速公路应急车道。当发生交通事故时,导致救援车辆无法及时到达现场,救援活动无法及时开展,也无法对恶意违法占用应急车道的车辆进行取证和处罚,以遏制该现象的再次发生。
[0005]
随着无人机快速的发展,无人机被广泛运用于高速公路路况巡航抓拍应急车道违章,但现有技术中的无人机至少存在以下问题:现有技术通常是采用无人机在巡航过程中拍摄高速道路视频传输到地面站台,如果强调实时性,视频数据较大,传输成本高,而且传输过程消耗能源多。如果不要求实时性,其也会产生大量储存数据,一方面需要承担存储成本,另一方面占用无人机资源,影响无人机正常工作和续航。
技术实现要素:
[0006]
本发明的目的在于提出一种能够有效完成高速公路巡航并且有效降低视频传输成本的无人机系统。
[0007]
为解决上述问题,本发明提供了一种用于高速公路巡检的无人机,包括无人机和地面站台,所述无人机设有无人机飞行模块、机载摄像模块、视频处理模块、图像识别模块、视频及图像储存模块以及通讯模块,其中,所述无人机飞行模块用于控制所述无人机的飞行与导航,所述机载摄像模块用于所述无人机飞行时对高速路面进行视频拍摄,其特征在于,所述视频处理模块设有视频段制成单元、视频段处理单元及视频段缓存单元,其中:-所述视频段制成单元与所述机载摄像模块通信连接,其将所述机载摄像模块摄制的视频按设定时长制成视频段并储存,所述视频段在所述图像识别模块空闲时接受所述视频段处理单元的调用,在所述图像识别模块执行工作时接受所述视频段缓存单元的调用,所述视频段在被调用后从所述视频段制成单元中删除;-所述视频段处理单元调用所述视频段制成单元或者所述视频段缓存单元中储存的视频段,并从所述视频段中提取至少一个帧的图像,所述视频段处理单元在所述视频段缓存单元中储存有所述视频段时优先调用其中的视频段;-所述视频段缓存单元调用所述视频段后对所述视频段临时储存,并接受所述视频段处理单元的调用,所述视频段缓存单元中缓存的视频段多于一时,所述视频段缓存单元对其被调用的优先级进行划分,储存于所述视频段缓存单元更早则优先被调用,所述视频段
在接受调用后删除;所述图像识别模块用于对所述视频段处理单元中提取的图像进行识别,判断该图像中有无车辆占用应急车道,若无则将所述视频段处理单元中的所述视频段删除,若有则所述视频段处理单元中的视频段以及被识别的图像存储至所述视频及图像储存模块中;通讯模块与所述地面站台进行通讯,并将所述视频及图像储存模块中储存的图像和视频传输至所述地面站台。
[0008]
作为本发明的进一步改进,所述图像识别模块包括:图像语义分割单元,与所述视频段处理单元通信连接,所述图像语义分割单元能够将所述视频段处理单元提取的所述图像进行语义分析,从而分割出车道和背景;车道曲线拟合单元,与所述图像语义分割单元通信连接,所述车道曲线拟合单元对语义分割后的所述图像中上的车道区域进行曲线拟合,获得行车道轮廓线和应急车道轮廓线;车辆检测单元,判断提取的所述图像中,应急车道一侧内是否有车辆通过。
[0009]
作为本发明的进一步改进,所述车道曲线拟合单元获能够取所述图像上的车道区域的车道线的像素坐标,再通过最小二乘法对所述车道线坐标进行曲线拟合,获得行车道和应急车道的二次抛物线曲线方程,最后根据获得的二次抛物线方程在所述帧图像的车道区域上绘制出拟合出来的行车线和应急车道线。
[0010]
作为本发明的进一步改进,所述车辆检测单元还能够获得所述行车道内的车辆数量信息,从而统计车流量。
[0011]
本发明的有益效果在于,本发明中将无人机拍摄的视频按时长分割成若干段,在无人机上对每段视频段提取少量帧图像,对该图像进行语义识别从而初步判断是否有车辆占用应急车道,初步判断结果显示有车辆占用时将该上述图像以及视频传输至地面站台,由地面站台做进一步确认,否则删除该视频段,本发明一方面只提取部分帧图片,工作强度低、占用资源少,另一方面,无需对整个视频进行数据传输,也降低了传输成本,降低了数据传输过程中的能源损耗。
附图说明
[0012]
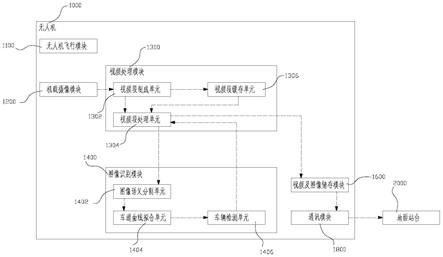
图1是本发明的结构示意图。
[0013]
图中:无人机1000、无人机飞行模块1100、机载摄像模块1200、视频处理模块1300、视频段制成单元1302、视频段处理单元1304、视频段缓存单元1306、图像识别模块1400、图像语义分割单元1402、车道曲线拟合单元1404、车辆检测单元1406、视频及图像储存模块1600、通讯模块1800、地面站台2000。
具体实施方式
[0014]
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
[0015]
如图1所示,本发明包括无人机1000和地面站台2000,所述无人机设有无人机飞行模块1100、机载摄像模块1200、视频处理模块1300、图像识别模块1400、视频及图像储存模块1600以及通讯模块1800,其中,所述无人机飞行模块1100用于控制所述无人机的飞行与导航,
所述机载摄像模块1200用于所述无人机飞行时对高速路面进行视频拍摄,其特征在于,所述视频处理模块1300设有视频段制成单元1302、视频段处理单元1304及视频段缓存单元1306,其中:-所述视频段制成单元1302与所述机载摄像模块1200通信连接,其将所述机载摄像模块1200摄制的视频按设定时长制成视频段并储存,所述视频段在所述图像识别模块1400空闲时接受所述视频段处理单元1304的调用,在所述图像识别模块1400执行工作时接受所述视频段缓存单元1306的调用,所述视频段在被调用后从所述视频段制成单元1302中删除;-所述视频段处理单元1304调用所述视频段制成单元1302或者所述视频段缓存单元1306中储存的视频段,并从所述视频段中提取至少一个帧的图像,所述视频段处理单元1304在所述视频段缓存单元1306中储存有所述视频段时优先调用其中的视频段;-所述视频段缓存单元1306调用所述视频段后对所述视频段临时储存,并接受所述视频段处理单元1304的调用,所述视频段缓存单元1306中缓存的视频段多于一时,所述视频段缓存单元1306对其被调用的优先级进行划分,储存于所述视频段缓存单元1306更早则优先被调用,所述视频段在接受调用后删除;所述图像识别模块1400用于对所述视频段处理单元1304中提取的图像进行识别,判断该图像中有无车辆占用应急车道,若无则将所述视频段处理单元1304中的所述视频段删除,若有则所述视频段处理单元1304中的视频段以及被识别的图像存储至所述视频及图像储存模块1600中;通讯模块1800与所述地面站台2000进行通讯,并将所述视频及图像储存模块1600中储存的图像和视频传输至所述地面站台2000。
[0016]
作为本发明的进一步改进,所述图像识别模块1400包括:图像语义分割单元1402,与所述视频段处理单元1304通信连接,所述图像语义分割单元1402能够将所述视频段处理单元1304提取的所述图像进行语义分析,从而分割出车道和背景;车道曲线拟合单元1404,与所述图像语义分割单元1402通信连接,所述车道曲线拟合单元1404对语义分割后的所述图像中上的车道区域进行曲线拟合,获得行车道轮廓线和应急车道轮廓线;车辆检测单元1406,判断提取的所述图像中,应急车道一侧内是否有车辆通过。
[0017]
作为本发明的进一步改进,所述车道曲线拟合单元1404获能够取所述图像上的车道区域的车道线的像素坐标,再通过最小二乘法对所述车道线坐标进行曲线拟合,获得行车道和应急车道的二次抛物线曲线方程,最后根据获得的二次抛物线方程在所述帧图像的车道区域上绘制出拟合出来的行车线和应急车道线。
[0018]
作为本发明的进一步改进,所述车辆检测单元1406还能够获得所述行车道内的车辆数量信息,从而统计车流量。
[0019]
本发明的具体原理如下:(1)无人机起飞,根据机载导航对目标高速公路进行巡航;(2)机载摄像头打开,对高速公路进行视频拍摄;(3)拍摄的视频由视频段制成单元1302处理后形成视频段,临时储存,如拍摄5分钟后,
将该5分钟的视频作为视频段予以临时储存;(4)检测图像识别模块1400是否空闲,(5)若图像识别模块1400不空闲,则视频段缓存单元1306调用该视频段制成单元1302中的视频段,被调用后,该视频段从视频段制成单元1302中删除,当视频段缓存单元1306中存储有多个视频段时,对该视频段进行优先级划分,其中,在所述视频缓存单元中先储存的视频段优先级高于后储存的视频段;(6)若图像识别模块1400空闲,则该视频段处理单元1304对视频段进行调用,该视频段来源于视频段制成单元1302或者视频缓存段缓存单元,当视频段缓存单元1306中缓存有视频段时,优先调用视频段缓存单元1306中的缓存视频段,且该视频段缓存单元1306中优先级高的视频段优先被调用,视频段在被调用后,从视频段制成单元1302或者视频缓存段缓存单元删除;(7)视频段处理单元1304对调用的视频段进行操作,对于美国视频段提取至少一个帧图像,至于多少帧根据工作需求而定和视频段的长短而定,如果视频段较短或者目的在于应急承担违章抓拍,则提取较少帧图像,如果视频段较长或者目的在于统计实时车流量,则可以提取更多帧图像;(8)通过图像语义分割单元1402对提取的图像进行语义分割,从而在该图像上获得将车道区域和背景区域,为做区分,可以将赋予车道区域以及背景区域不同的像素值;(9)车道曲线拟合单元1404获能够取语义分割后的图像上的车道区域的车道线的像素坐标;(10)通过最小二乘法对车道线坐标进行曲线拟合,获得行车道和应急车道的二次抛物线曲线方程;(11)根据获得的二次抛物线方程在图像的车道区域上绘制出拟合出来的行车线和应急车道线;(12)判断是否有车辆在应急车道线的一侧;(13)如果没有,则删除视频段处理单元1304中储存的视频段,图像识别模块1400处于空闲状态;(14)如果有,则由视频及图像储存单元调用视频段处理单元1304中储存的视频段提及拟合有车道线的图像,并储存,此时被调用的视频段被删除,图像识别模块1400处于空闲状态;(15)通过通讯模块1800将上述视频段和图像传输至地面站台2000。
[0020]
以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1