一种多功能乘务服务智能机器车系统及其控制方法与流程
[0001]
本发明涉及智能机器人技术领域,尤其涉及一种多功能乘务服务智能机器车系统及其控制方法。
背景技术:
[0002]
目前大多数火车上的乘务服务内容都太过于传统,如人工检票,餐车供餐,接开水等。人工检票需要的人力工作量大,消耗时间长,还容易出现逃票漏票现象;餐车供餐的供餐量少,且由于火车过道狭窄,容易造成人员拥挤,大部分乘客都更倾向于使用点餐app进行提前点餐送餐,导致难以管理;接开水的服务需要乘客自行前往车厢底部自行接水,容易造成人员拥挤。且人工服务的服务内容单一。
[0003]
采用传统的人工送餐模式,不仅会造成列车拥挤,难以管理,还会导致站内资源得不到有效利用,和某些操作复杂等问题。而如今智能化的推行不仅能解决人力投入量大的问题,还能减少乘客与乘务员的工作量,提升乘务服务的效率和降低可能存在的拥挤风险。
技术实现要素:
[0004]
本发明要解决的技术问题在于针对现有技术中的缺陷,提供一种多功能乘务服务智能机器车系统及其控制方法。
[0005]
本发明解决其技术问题所采用的技术方案是:
[0006]
本发明提供一种多功能乘务服务智能机器车系统,该系统包括智能机器车,设置在智能机器车内的控制模块、身份证识别模块、压力检测模块、磁传感器模块、超声波模块和无线通讯模块,以及云端;其中:
[0007]
智能机器车,其车身上设置有开水出水系统和送餐系统;
[0008]
身份证识别模块,用于检测身份证信息,并通过无线通讯模块将身份证信息发送到云端进行身份核实;
[0009]
压力检测模块,用于检测开水出水系统的水压,通过控制模块接收压力检测模块和云端的数据,并对存储在控制模块中的压力参数值进行调用和比较,进而对开水出水系统进行控制;
[0010]
磁传感器模块,用于采集电磁信号进行路线寻迹,通过控制模块接收云端发送的位置信息,并读取磁传感器模块采集到的电磁信号后进行寻迹前往服务位置;
[0011]
超声波模块,用于在智能机器车进行路线寻迹时实时进行障碍物检测,当检测到障碍物信息时,通过控制模块控制智能机器车停止;
[0012]
控制模块,还用于对开水出水系统和送餐系统的步进电机进行控制,在抵达服务位置后,实现送餐门和开水门的开启和关闭操作,并进行语音识别的人机交互。
[0013]
进一步地,本发明的所述控制模块采用stm32f407zgt6核心控制模块。
[0014]
进一步地,本发明的所述控制模块在一个控制周期内对接收信息和寻迹路线行进规划的调控过程中,首先初始化控制模块内部所存储的地点位置变量的设定值,这些设定
值被保存在其内部的一块特定的ram区域中,其后从云端收到地点数据并进行数据解码,解码后从ram中调取初始位置变量的设定值与当前值进行比较,计算出偏差值,利用该偏差值计算出系统执行器的所需的前进距离,最后根据距离寻迹前往相应地点。
[0015]
进一步地,本发明的所述云端的服务器在列车出站后,将下车人数和上车人数的数据存入数据库中,并向控制模块发送需要检票的位置信息,智能车根据位置信息前往指定位置进行身份证检票。
[0016]
进一步地,本发明的该系统还包括乘客客户端,乘客在客户端中选择自己需要的相应服务内容,服务数据将传输给云端的服务器存入数据库中,并将服务信息和服务位置数据传输给智能车系统,智能车采用磁传感的方法进行寻迹,超声波检测进行避障处理,在抵达指定位置后,智能车系统控制不同部件实现不同的服务内容。
[0017]
本发明提供一种多功能乘务服务智能机器车系统的控制方法,包括以下步骤:
[0018]
步骤1、判断智能车系统当前所处的工作模式,若未选择服务模式,系统默认进入检票模式,执行步骤2;若系统选择服务模式,执行步骤3;
[0019]
步骤2、检票模式:接收由云端传来的新上乘客的位置信息,智能车通过路径寻迹和避障识别达到目的地,然后进行语音提示身份证检票,检测完后将身份证信息上传云端进行检索核对,核对完成后语音提示检票成功,智能车回到原位;
[0020]
步骤3、服务模式:乘客通过客户端将需求服务信息传递给云端服务器,云端服务器将检索的车票验证信息传输给智能车系统,云端服务器的数据库将用户的身份信息及需求服务信息有效储存并与云端服务器通信;
[0021]
步骤4、云端服务器向智能车系统发送服务信息和服务位置,智能车通过路径寻迹和避障识别达到服务位置,并判断服务信息的类型;
[0022]
步骤5、若为送水服务,则控制步进电机进行出水门的开门操作,并发出语音提示;若为送餐服务,则控制步进电机进行送餐门的开门操作,并发出语音提示;
[0023]
步骤6、完成服务模式后,智能车回到原位。
[0024]
进一步地,本发明的该方法中进行路径寻迹的算法具体为:
[0025]
保持智能车在列车上直线行驶取,使当前智能车行进的导航角与预期相同,保持与过道的左右间隔相等;计算导航角的方法为:
[0026]
计算地球磁场和导航角之间的关系,将该点的地磁场hearth分解为两个平行于当地水平面的分量和一个垂直于当地水平面的分量;
[0027]
在水平方向上磁场两个分量的矢量和总是指向磁北,地磁传感器中的导航角θ1就是当前所指的方向和磁北x的夹角,即:
[0028]
θ1=a tan 2(hy,hx)
[0029]
其中,hnorth和hz分别是hearth在垂直方向和水平方向的分量,hx和hy是hnorth在x和y方向上的分量;atan2函数是返回方向角的函数,θ1取值范围是[-pi,pi],θ1的取值不仅取决于正切值hy/hx,还取决于坐标(hy,hx)属于哪个象限:
[0030]
当坐标(hy,hx)属于第一象限,0<θ1<pi/2;
[0031]
当坐标(hy,hx)属于第二象限,pi/2<θ1<pi;
[0032]
当坐标(hy,hx)属于第三象限,-pi<θ1<-pi/2;
[0033]
当坐标(hy,hx)属于第四象限,-pi/2<θ1<0;
[0034]
当hy=0,hx>0时,θ1=0;
[0035]
当hy=0,hx<0时,θ1=pi;
[0036]
当hy>0,hx=0时,θ1=pi/2;
[0037]
当hy<0,hx=0时,θ1=-pi/2;
[0038]
使计算出的地磁传感器中的导航角θ1值为反正切值,需要将反正切值再乘以180/pi,得到反正切角,角度范围为-180
°
~180
°
,再将其加180
°
得到最终的导航角:
[0039]
angle=atan 2(hy,hx)
×
(180/pi)+180。
[0040]
进一步地,本发明的该方法中进行避障识别的算法具体为:
[0041]
在智能车行驶过程中,当超声波传感器检测到有移动物体穿行过道时,将移动目标距智能车的相对距离和其移动速度传回主控模块;
[0042]
智能车在满足车辆自身制动约束条件、建立避障系统的制动距离d
s
:
[0043][0044]
其中,a1为智能车减速度,d0为最小间距,在采取避障措施的情况下,保证距离移动物体的最小间距,根据安全距离dd与制动距离ds建立模型,根据实际超声波模块的检测距离d1来判断是否需要避障。
[0045]
进一步地,本发明的该方法中需要进行避障时,其算法具体为:
[0046]
当需要进行避障时,先以智能车当前位置为起点,移动物体出现所映射到智能车路径上的投影点为末端;通过二次规划与牛顿法相结合的方法寻找车辆距离基准线的最近点;假设车辆距离基准线的最近点所在基准线上的弧长为s,车辆与基准线之间的距离为横向偏移量ρ,则车辆当前坐标可用s-ρ坐标系表示;在此坐标中,避障路径由基准线长度
△
s、当前车辆位置偏移量ρ
si
已经最终横向偏移量ρ
fi
确定;避障候选路径满足以下方程,则第i条避障候选路径表示为:
[0047][0048]
其中,δs=s-s
start
为智能车距离基准线的最近点所在基准线上的弧长;s
end
为基准线上候选避障路径的末端对应的弧长;
[0049]
求解上式中系数a、b、c,避障候选路径上的生成需考虑智能车当前的航向,同时希望路径末端与基准线的前进方向相同,以保证规划出可行路径,确认以下边界条件:
[0050][0051]
其中,θ为基准线最近点切向角θ
start
与当前智能车航向θ0之差
[0052]
由上述算法通过设定合适的横向偏移量
△
ρ,根据不同的横向偏移量ρ
fi
的值,计算出不同的系数,a、b、c,从而得到多条避障候选路线;
[0053]
由于考虑到移动物体的移动速度与距离智能车的相对距离,使用一种加权多目标代价函数去确定最佳避障路线;代价函数主要考虑路径安全性,设计函数如下,包括路径安全性代价函数f
s
和路径偏移代价函数f0:
[0054]
f(i)=w
s
f
s
(i)+w0f0(i)
[0055]
select=min f(i)
[0056]
其中,f(i)为路径总代价函数;i为避障候选路径序列号;w
s
和w0分别为各代价函数的权重系数;select为选择的路径;
[0057]
选择以下权重系数:w
s
=0.7,w0=0.10,f
s
∈(0.4,1]。
[0058]
进一步地,本发明的该方法的送水服务中控制出水的算法具体为:
[0059]
由于考虑到智能车出水口压力传感器信号易受到高频信号干扰,采用有限冲击响应iir低通滤波器抑制干扰后,再采用零极点补偿进行压力检测传感器检测信号补偿;
[0060]
iir滤波器用差分方程和系统函数描述,差分方程为:
[0061][0062]
其中,x为输入信号;y为输出信号;a,b为系数;对应系统函数为:
[0063][0064]
由于传感器动态特性与其传递函数零极点有关,现对其零极点分析,观察配置有效零极点来对系统动态特性补偿;对于使用的压力传感器,先采用二阶系统传感器模型进行其极点特性求解;
[0065][0066][0067]
其中,α为新配置极点的实部,β为新配置极点的虚部,t为采样间隔,现去0.6us,t
rr
为所要求的响应时间,现取5us,ζ
e
为等效阻尼比,现取0.9;由上式求出:p
e1,2
=0.69767
±
i0.00212;
[0068]
由公式:
[0069][0070][0071]
其中,g
e
(z)为补偿模型,因此最终压力补偿滤波器为:
[0072][0073]
本发明产生的有益效果是:本发明的多功能乘务服务智能机器车系统及其控制方法,可完成身份证检票,送餐,提供开水等乘务服务需求,且可根据需要灵活添加各种外设来满足需求。车票检测使用身份证检测方法,既可减少乘客取票的繁琐过程,也减少了对智能车体积的占用。同时一体化服务软件中内置了多种功能服务,使乘务服务多元化。乘客使用操作软件选择所需的服务内容,软件将发送数据至云平台服务器,服务器链接管理系统,待准备完成后,智能车系统就可准确服务乘客。使管理更加方便,服务乘客更加快捷。
附图说明
[0074]
下面将结合附图及实施例对本发明作进一步说明,附图中:
[0075]
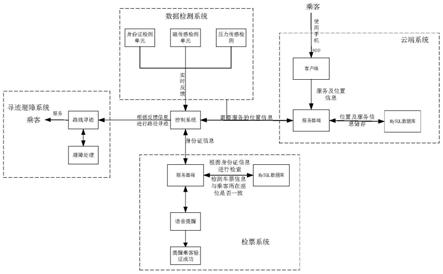
图1是本发明实施例的系统整体结构框图;
[0076]
图2是本发明实施例的软件流程框图;
[0077]
图3是本发明实施例的软件与多功能智能车交互流程图;
[0078]
图4是本发明实施例的多功能智能车的整体设计图;
[0079]
图5是本发明实施例的智能车行驶图;
[0080]
图6是本发明实施例的磁场向量分析图;
[0081]
图7是本发明实施例的智能避障图;
[0082]
图8是本发明实施例的智能避障计算边界条件图。
具体实施方式
[0083]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0084]
本发明实施例的多功能乘务服务智能机器车系统,该系统包括智能机器车,设置在智能机器车内的控制模块、身份证识别模块、压力检测模块、磁传感器模块、超声波模块和无线通讯模块,以及云端;其中:
[0085]
智能机器车,其车身上设置有开水出水系统和送餐系统;
[0086]
身份证识别模块,用于检测身份证信息,并通过无线通讯模块将身份证信息发送到云端进行身份核实;
[0087]
压力检测模块,用于检测开水出水系统的水压,通过控制模块接收压力检测模块和云端的数据,并对存储在控制模块中的压力参数值进行调用和比较,进而对开水出水系统进行控制;
[0088]
磁传感器模块,用于采集电磁信号进行路线寻迹,通过控制模块接收云端发送的位置信息,并读取磁传感器模块采集到的电磁信号后进行寻迹前往服务位置;
[0089]
超声波模块,用于在智能机器车进行路线寻迹时实时进行障碍物检测,当检测到障碍物信息时,通过控制模块控制智能机器车停止;
[0090]
控制模块,还用于对开水出水系统和送餐系统的步进电机进行控制,在抵达服务位置后,实现送餐门和开水门的开启和关闭操作,并进行语音识别的人机交互。
[0091]
如图1所示乘务服务多功能智能车系统内按功能进行划分:包含了主控系统部分,寻迹避障系统,数据检测系统,云端交互系统,检票系统。其中,寻迹避障系统包括服务路径寻迹与避障停车两部分。检测系统涵盖身份证检测单元,磁传感检测单元,压力传感检测单元三部分。检票系统包括语音交互设计与云端数据交互设计两部分。以及一套web端开发的云端交互系统所组成。
[0092]
如图2所示的系统一个控制周期内的软件工作流程,首先会判断当前系统所处的工作状态,若未选择其他工作模式,系统默认进入检票工作流程,系统先接收由云端传来的新上乘客的位置信息,接下来乘务服务多功能智能车系统通过路径寻迹和避障识别达到目的地,然后进行语音提示身份证检票,检测完后将身份证信息上传云端进行检索核对,核对完成后语音提示检票成功,智能车回到原位。若为服务模式,云端先向乘务服务多功能智能车系统发送服务信息和服务位置,接下来乘务服务多功能智能车系统通过路径寻迹和避障识别达到目的地,驱动电机打开相应服务所需的门并发出语音提示。
[0093]
检测系统将传感器采集到的系统信息以特定频率发送给主控芯片实现信息的实时反馈,控制系统根据反馈得到的信息进行智能车路径寻迹和避障识别,同时在进行送水操作时会通过压力传感器判断何时出水。人机交互系统通过语音识别技术实现人机交互功能。云端系统中,乘客通过客户端将需求服务信息传递给服务器端,服务器端将检索的车票验证信息传输给智能车系统。mysql数据库将用户的身份信息及需求服务信息有效储存并与服务器端通信。
[0094]
如图3所示,本web项目分为车票检测系统以及服务系统。通过系统对智能车系统端接收的身份证检测信息,服务器端根据身份证检测数据进行检索,并将检索信息反馈给智能车系统端。起始登录页面可注册普通账号,进入服务系统进行服务选择。
[0095]
在客户选择服务完毕后,客户端会将服务数据反馈给服务器端,同时作为历史数据存入数据库。进而将数据传输给智能车系统,控制智能车前往指定位置完成相应服务。
[0096]
如图4所示的是多功能智能车的整体设计图,智能车整体在结构上可分为三层:最上层为智能车的检测通讯层,智能车的控制系统,检测系统,人机交互系统,通讯系统等弱电系统均位于顶层;中间层为储物层,此层中分布着两个大仓和两个小仓:其中大仓用于储存食物,舱门受一个拉杆系统控制,通过步进电机的运动控制舱门的开闭;小仓用于储存热水,小仓的闸门式舱门受步进电机驱动控制,其仓内底部设置了一个压力传感器,使小仓能够做到压敏出水。同类型的仓室分居智能车两侧,使得智能车两边的乘客都能轻松拿到食物和水。最下层为制动层,智能车的制动系统、储电充电系统和电磁检测系统位于此层,给整智能车提供动力和路径寻迹,支持整智能车的运作。
[0097]
本发明实施例的多功能乘务服务智能机器车系统的控制方法,包括以下步骤:
[0098]
步骤1、判断智能车系统当前所处的工作模式,若未选择服务模式,系统默认进入检票模式,执行步骤2;若系统选择服务模式,执行步骤3;
[0099]
步骤2、检票模式:接收由云端传来的新上乘客的位置信息,智能车通过路径寻迹和避障识别达到目的地,然后进行语音提示身份证检票,检测完后将身份证信息上传云端进行检索核对,核对完成后语音提示检票成功,智能车回到原位;
[0100]
步骤3、服务模式:乘客通过客户端将需求服务信息传递给云端服务器,云端服务器将检索的车票验证信息传输给智能车系统,云端服务器的数据库将用户的身份信息及需求服务信息有效储存并与云端服务器通信;
[0101]
步骤4、云端服务器向智能车系统发送服务信息和服务位置,智能车通过路径寻迹和避障识别达到服务位置,并判断服务信息的类型;
[0102]
步骤5、若为送水服务,则控制步进电机进行出水门的开门操作,并发出语音提示;若为送餐服务,则控制步进电机进行送餐门的开门操作,并发出语音提示;
[0103]
步骤6、完成服务模式后,智能车回到原位。
[0104]
如图5所示,该方法中进行路径寻迹的算法具体为:
[0105]
保持智能车在列车上直线行驶取,使当前智能车行进的导航角与预期相同,保持与过道的左右间隔相等;计算导航角的方法为:
[0106]
计算地球磁场和导航角之间的关系,将该点的地磁场hearth分解为两个平行于当地水平面的分量和一个垂直于当地水平面的分量;
[0107]
如图6所示,在水平方向上磁场两个分量的矢量和总是指向磁北,地磁传感器中的导航角θ1就是当前所指的方向和磁北x的夹角,即:
[0108]
θ1=a tan 2(hy,hx)
[0109]
其中,hnorth和hz分别是hearth在垂直方向和水平方向的分量,hx和hy是hnorth在x和y方向上的分量;atan2函数是返回方向角的函数,θ1取值范围是[-pi,pi],θ1的取值不仅取决于正切值hy/hx,还取决于坐标(hy,hx)属于哪个象限:
[0110]
当坐标(hy,hx)属于第一象限,0<θ1<pi/2;
[0111]
当坐标(hy,hx)属于第二象限,pi/2<θ1<pi;
[0112]
当坐标(hy,hx)属于第三象限,-pi<θ1<-pi/2;
[0113]
当坐标(hy,hx)属于第四象限,-pi/2<θ1<0;
[0114]
当hy=0,hx>0时,θ1=0;
[0115]
当hy=0,hx<0时,θ1=pi;
[0116]
当hy>0,hx=0时,θ1=pi/2;
[0117]
当hy<0,hx=0时,θ1=-pi/2;
[0118]
使计算出的地磁传感器中的导航角θ1值为反正切值,需要将反正切值再乘以180/pi,得到反正切角,角度范围为-180
°
~180
°
,再将其加180
°
得到最终的导航角:
[0119]
angle=atan 2(hy,hx)
×
(180/pi)+180。
[0120]
如图7所示,该方法中进行避障识别的算法具体为:
[0121]
在智能车行驶过程中,当超声波传感器检测到有移动物体穿行过道时,将移动目标距智能车的相对距离和其移动速度传回主控模块;
[0122]
智能车在满足车辆自身制动约束条件、建立避障系统的制动距离d
s
:
[0123][0124]
其中,a1为智能车减速度,d0为最小间距,在采取避障措施的情况下,保证距离移动物体的最小间距,根据安全距离dd与制动距离ds建立模型,根据实际超声波模块的检测距离d1来判断是否需要避障。
[0125]
该方法中需要进行避障时,其算法具体为:
[0126]
当需要进行避障时,先以智能车当前位置为起点,移动物体出现所映射到智能车路径上的投影点为末端;通过二次规划与牛顿法相结合的方法寻找车辆距离基准线的最近点;假设车辆距离基准线的最近点所在基准线上的弧长为s,车辆与基准线之间的距离为横向偏移量ρ,则车辆当前坐标可用s-ρ坐标系表示;在此坐标中,避障路径由基准线长度
△
s、当前车辆位置偏移量ρ
si
已经最终横向偏移量ρ
fi
确定;避障候选路径满足以下方程,则第i条避障候选路径表示为:
[0127][0128]
其中,δs=s-s
start
为智能车距离基准线的最近点所在基准线上的弧长;s
end
为基准线上候选避障路径的末端对应的弧长;
[0129]
求解上式中系数a、b、c,避障候选路径上的生成需考虑智能车当前的航向,同时希望路径末端与基准线的前进方向相同,以保证规划出可行路径,确认以下边界条件:
[0130][0131]
其中,θ为基准线最近点切向角θ
start
与当前智能车航向θ0之差
[0132]
如图8所示,由上述算法通过设定合适的横向偏移量
△
ρ,根据不同的横向偏移量ρ
fi
的值,计算出不同的系数,a、b、c,从而得到多条避障候选路线;
[0133]
由于考虑到移动物体的移动速度与距离智能车的相对距离,使用一种加权多目标代价函数去确定最佳避障路线;代价函数主要考虑路径安全性,设计函数如下,包括路径安全性代价函数f
s
和路径偏移代价函数f0:
[0134]
f(i)=w
s
f
s
(i)+w0f0(i)
[0135]
select=min f(i)
[0136]
其中,f(i)为路径总代价函数;i为避障候选路径序列号;w
s
和w0分别为各代价函数的权重系数;select为选择的路径;
[0137]
选择以下权重系数:w
s
=0.7,w0=0.10,f
s
∈(0.4,1]。
[0138]
该方法的送水服务中控制出水的算法具体为:
[0139]
由于考虑到智能车出水口压力传感器信号易受到高频信号干扰,采用有限冲击响应iir低通滤波器抑制干扰后,再采用零极点补偿进行压力检测传感器检测信号补偿;
[0140]
iir滤波器用差分方程和系统函数描述,差分方程为:
[0141]
[0142]
其中,x为输入信号;y为输出信号;a,b为系数;对应系统函数为:
[0143][0144]
由于传感器动态特性与其传递函数零极点有关,现对其零极点分析,观察配置有效零极点来对系统动态特性补偿;对于使用的压力传感器,先采用二阶系统传感器模型进行其极点特性求解;
[0145][0146][0147]
其中,α为新配置极点的实部,β为新配置极点的虚部,t为采样间隔,现去0.6us,t
rr
为所要求的响应时间,现取5us,ζ
e
为等效阻尼比,现取0.9;由上式求出:p
e1,2
=0.69767
±
i0.00212;
[0148]
由公式:
[0149][0150][0151]
其中,g
e
(z)为补偿模型,因此最终压力补偿滤波器为:
[0152][0153]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1