机器人控制系统、机器人控制方法和存储介质与流程
1.本公开涉及一种机器人控制系统、机器人控制方法和存储介质。
背景技术:
2.日本未审查专利申请公开第9-267276号公开了在医疗福利设施中移动的递送机器人系统。
技术实现要素:
3.在这样的递送机器人系统中,期望对机器人进行适当的控制。
4.为满足这种期望而做出的本公开提供了能够实现对机器人的适当控制的机器人控制系统、机器人控制方法和存储介质。
5.根据本实施例的机器人控制系统是用于控制在设施内可自主移动的移动机器人的机器人控制系统。所述系统执行:获取关于在所述移动机器人的前进方向上的前方的行驶区域中存在的人的属性信息;根据所述属性信息设定所述移动机器人的操作强度的上限;以及根据所述上限控制所述移动机器人的操作。
6.在所述控制系统中,所述操作强度的所述上限可以是所述移动机器人的移动速度的速度上限。
7.在所述控制系统中,可以由相机拍摄所述行驶区域,并且可以基于所述相机的所述图像获取所述属性信息。
8.在所述控制系统中,所述相机可以是设置在所述设施中的环境相机。
9.在所述控制系统中,所述相机可以是安装在所述移动机器人上的机器人相机。
10.在所述控制系统中,所述设施可以是医疗福利设施,并且所述属性信息可以包括指示所述人是否为医护人员的信息。
11.在所述控制系统中,所述属性信息可以包括指示所述人是健全人还是残疾人的信息。
12.在所述控制系统中,所述属性信息可以包括关于年龄的信息。
13.根据本实施例的机器人控制方法是用于控制在设施内可自主移动的移动机器人的机器人控制方法。所述方法包括:获取关于在所述移动机器人的前进方向上的前方的行驶区域中存在的人的属性信息;根据所述属性信息设定所述移动机器人的操作强度的上限;以及根据所述上限控制所述移动机器人的操作。
14.在所述控制方法中,所述操作强度的所述上限可以是所述移动机器人的移动速度的速度上限。
15.在所述控制方法中,可以由相机拍摄所述行驶区域,并且可以基于所述相机的所述图像获取所述属性信息。
16.在所述控制方法中,所述相机可以是设置在所述设施中的环境相机。
17.在所述控制方法中,所述相机可以是安装在所述移动机器人上的机器人相机。
18.在所述控制方法中,所述设施可以是医疗福利设施,并且所述属性信息可以包括指示所述人是否为医护人员的信息。
19.在所述控制方法中,所述属性信息可以包括指示所述人是健全人还是残疾人的信息。
20.在所述控制方法中,所述属性信息可以包括关于年龄的信息。
21.根据本实施例的存储介质是存储有程序的存储介质,所述程序使计算机执行用于控制在设施内可自主移动的移动机器人的机器人控制方法。所述机器人控制方法包括:获取关于在所述移动机器人的前进方向上的前方的行驶区域中存在的人的属性信息;根据所述属性信息设定所述移动机器人的操作强度的上限;以及根据所述上限控制所述移动机器人的操作。
22.在所述存储介质中,所述操作强度的所述上限可以是所述移动机器人的移动速度的速度上限。
23.在所述存储介质中,可以由相机拍摄所述行驶区域,并且可以基于所述相机的所述图像获取所述属性信息。
24.在所述存储介质中,所述相机可以是设置在所述设施中的环境相机。
25.在所述存储介质中,所述相机可以是安装在所述移动机器人上的机器人相机。
26.在所述存储介质中,所述设施可以是医疗福利设施,并且所述属性信息可以包括指示所述人是否为医护人员的信息。
27.在所述存储介质中,所述属性信息可以包括指示所述人是健全人还是残疾人的信息。
28.在所述存储介质中,所述属性信息可以包括关于年龄的信息。
29.根据本发明,能够提供能够实现移动机器人的适当控制的机器人控制系统、机器人控制方法和存储介质。
附图说明
30.下面将参照附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,其中,相同的标号表示相同的元件,并且其中:
31.图1是用于描述使用了根据实施例的移动机器人的系统的整体配置的概念图;
32.图2是根据本实施例的控制系统的控制框图;
33.图3是示出移动机器人的示例的示意图;
34.图4是示例1的说明性视图;
35.图5是示例2的说明性视图;
36.图6是示例3的说明性视图;以及
37.图7是示出根据本实施例的控制方法的流程图。
具体实施方式
38.尽管在下文中将通过本发明的实施例描述本发明,但是由权利要求书所述的范围内的本发明不限于以下描述的实施例。而且,并不是实施例中描述的所有组成构件都是为实现目的不可或缺的手段。
39.示意性配置
40.图1是用于描述用于使用根据本实施例的移动机器人20的系统1的整体配置的概念图。例如,移动机器人20是执行待递送物品的递送作为任务的递送机器人。移动机器人20自主行驶,以在诸如医院、康复中心、护理设施和养老院的医疗福利设施内递送待递送物品。根据本实施例的系统还能够用于诸如购物中心的商业设施。
41.用户u1将待递送物品放置在移动机器人20中并且提出递送请求。移动机器人20通过自主移动到设定的目标目的地来递送待递送物品。换句话说,移动机器人20执行物品递送任务(在下文中也简称为任务)。在以下描述中,将装载待递送物品的场所定义为递送源,并且将递送待递送物品的场所定义为递送目的地。
42.例如,假设移动机器人20在具有多个医疗科室的综合医院内移动。移动机器人20在医疗科室之间递送物资、消耗品、医疗设备等。例如,移动机器人从一个医疗科室的护士站向另一个医疗科室的护士站递送待递送物品。可替代地,移动机器人20从物资和医疗设备的仓库向任意医疗科室的护士站递送待递送物品。移动机器人20还向医疗科室或计划使用这些药品的患者递送在配药科中配好的药品。
43.待递送物品的示例可以包括药品、诸如包装袋的消耗品、标本、测试工具、医疗设备、医院餐食以及诸如文具的物资。医疗设备的示例可以包括血压计、输血泵、注射泵、脚踏泵、护士呼叫器、离床传感器、低压连续抽吸装置、心电监视仪、药物注射控制器、肠道喂养泵、人工呼吸机、袖带压力计、触摸传感器、抽吸装置、雾化器、脉搏血氧计、血压计、人工复苏器、无菌装置和回声装置。移动机器人20还可以递送诸如医院餐食或用于检查的食物的餐食。移动机器人20可以进一步递送使用过的装备、餐具等。这使得收集使用过的装备、餐具等成为可能。当递送目的地位于不同的楼层上,移动机器人20可以通过使用电梯或其他设备移动。
44.系统1包括一个以上的移动机器人20、上层管理装置10、网络600、通信单元610和用户终端400。用户u1或用户u2能够通过使用他或她的用户终端400提出待递送物品的递送请求。例如,用户终端400是平板电脑或智能手机。用户终端400可以是能够通过无线或有线连接通信的信息处理装置。
45.在本实施例中,移动机器人20和用户终端400经由网络600连接到上层管理装置10。移动机器人20和用户终端400通过通信单元610连接到网络600。网络600是有线或无线的局域网(lan)或广域网(wan)。上层管理装置10以有线或无线的方式进一步连接到网络600。例如,通信单元610是安装在相应环境中的无线lan单元。例如,通信单元610可以是通用的通信装置,例如wifi路由器。
46.从用户u1和用户u2的用户终端400输出的各种信号经由网络600被一次发送到上层管理装置10,并且从上层管理装置10转送到目标移动机器人20。类似地,从移动机器人20输出的各种信号经由网络600被一次发送到上层管理装置10,并且然后从上层管理装置10转送到目标用户终端400。上层管理装置10是连接到各个装置的服务器,并且从各个装置收集数据。上层管理装置10不限于物理上单个的装置。相反,上层管理装置10可以包括执行分布式处理的多个装置。上层管理装置10也可以分布式地安装在诸如移动机器人20的边缘装置中。例如,系统1可以部分或全部安装在移动机器人20中。
47.用户终端400和移动机器人20可以在不经由上层管理装置10的情况下交换信号。
例如,用户终端400和移动机器人20可以经由通过无线通信直接交换信号。可替代地,用户终端400和移动机器人20可以经由通信单元610交换信号。
48.用户u1或用户u2使用用户终端400提出待递送物品的递送的请求。在下文中,将假设用户u1是在递送源处提出递送请求的人并且用户u2是递送目的地(目标目的地)处的预期接收者来进行说明。当然,递送目的地处的用户u2能够提出递送请求。位于除递送源和递送目的地以外的地点处的用户也可以提出递送请求。
49.当用户u1提出递送请求时,用户u1使用用户终端400输入待递送物品的细节、待递送物品的接收地点(在下文中也称作递送源)、待递送物品的递送地点(在下文中也称作递送目的地)、到达递送源的估计时间(待递送物品的接收时间)、到达递送目的地的估计时间(递送截止时间)等。在下文中,这些信息也称作递送请求信息。用户u1能够通过操作用户终端400的触摸面板来输入递送请求信息。递送源可以是用户u1存在的场所,或待递送物品的存放场所。递送目的地是用户u2或计划使用待递送物品的患者存在的场所。
50.用户终端400向上层管理装置10发送由用户u1输入的递送请求信息。上层管理装置10是管理多个移动机器人20的管理系统。上层管理装置10向移动机器人20发送用于执行递送任务的操作命令。上层管理装置10针对各个递送请求判定被用于执行相关递送任务的移动机器人20。然后,上层管理装置10向所选择的移动机器人20发送包括该操作命令的控制信号。移动机器人20根据操作命令从递送源移动以到达递送目的地。
51.例如,上层管理装置10将递送任务分配给递送源处或递送源附近的移动机器人20。可替代地,上层管理装置10将递送任务分配给正在接近递送源或其附近的移动机器人20。被分配了任务的移动机器人20前往递送源以接收待递送物品。例如,递送源是请求了任务的用户u1存在的场所。
52.当移动机器人20到达递送源处时,用户u1或其他人员将待递送物品装载到移动机器人20上。装载有待递送物品的移动机器人20自主移动到作为目标目的地的递送目的地。上层管理装置10向递送目的地处的用户u2的用户终端400发送信号。这使得用户u2知道待递送物品正在递送中并且知道物品的计划到达时刻。当移动机器人20到达设定的递送目的地时,用户u2能够接收存放在移动机器人20中的待递送物品。以这种方式,移动机器人20执行递送任务。
53.在这个整体配置中,控制系统的多个元件能够被分布到移动机器人20、用户终端400和上层管理装置10,并且这些元件能够构建作为整体的控制系统。还能够通过能够将用于实现待递送物品的递送的实质元件集中在一个装置中来构建系统。上层管理装置10控制一个以上的移动机器人20。
54.控制框图
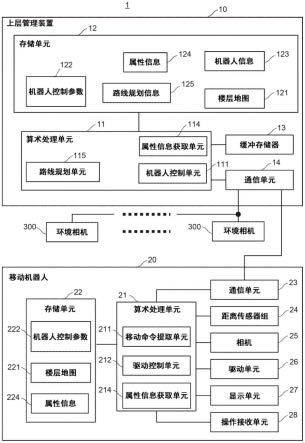
55.图2是示出系统1的控制系统的控制框图。如图2中所示,系统1包括上层管理装置10、移动机器人20和环境相机300。
56.系统1在使移动机器人20在规定设施内自主移动的同时高效地控制移动机器人20。因此,在设施中安装环境相机300。例如,环境相机300安装在设施中的通道、走廊、电梯和设施出入口这样的场所当中。
57.环境相机300获取移动机器人20的移动范围的图像。在系统1中,由上层管理装置10收集由环境相机300获取的图像和基于图像的信息。可替代地,可以直接向移动机器人发
送由环境相机300获取的图像等。环境相机300可以是设置在设施内部的通道和设施出入口中的监控相机等。环境相机300可以用来得到设施内部的拥挤状况的分布。
58.在根据第一实施例的系统1中,上层管理装置10基于递送请求信息执行路线规划。上层管理装置10基于生成的路线规划信息为各个移动机器人20指定待前往的场所。然后,移动机器人20向由上层管理装置10指定的场所自主移动。移动机器人20使用安装在其自身中的传感器、楼层地图、位置信息等向指定场所(目的地)自主移动。
59.例如,移动机器人20行驶以便不与周围的装置、物体、墙、人(在下文中统称为周边物体)接触。具体地,移动机器人20检测与周边物体的距离并在与周边物体保持固定距离(距离阈值)以上的状态下行驶。当与周边物体的距离变得等于或小于距离阈值时,移动机器人20减速或停止。以这种方式,移动机器人20能够在不与周边物体接触的情况下行驶。由于能够避免接触,因此能够实现安全和高效的递送。
60.上层管理装置10包括算术处理单元11、存储单元12、缓冲存储器13和通信单元14。算术处理单元11执行算术处理以控制和管理移动机器人20。例如,算术处理单元11能够实施为能够执行程序的装置,例如计算机的中央处理单元(cpu)。各种功能也能够通过程序实现。图2仅示出了算术处理单元11中的特征单元,包括机器人控制单元111、属性信息获取单元114和路线规划单元115。然而,算术处理单元11能够包括其他处理框。
61.机器人控制单元111执行算术处理并且生成用于远程控制移动机器人20的控制信号。机器人控制单元111基于稍后描述的路线规划信息125等生成控制信号。机器人控制单元111进一步基于从环境相机300和移动机器人20得到的各种信息来生成控制信号。控制信号可以包括稍后描述的楼层地图121、机器人信息123和机器人控制参数122的更新信息。换句话说,当更新了各种信息时,机器人控制单元111生成对应于更新信息的控制信号。
62.属性信息获取单元114基于由环境相机300和移动机器人20的相机25获取的图像获取属性信息。属性信息将稍后描述。机器人控制单元111可以基于属性信息生成控制信号。通信单元14向各个移动机器人20发送由机器人控制单元111生成的控制信号。
63.路线规划单元115针对各个移动机器人20执行路线规划。当输入递送任务时,路线规划单元115基于递送请求信息执行用于将相关待递送物品递送到递送目的地(目标目的地)的路线规划。具体地,路线规划单元115参照已经存储在存储单元12中的路线规划信息125、机器人信息123等来确定要执行新的递送任务的移动机器人20。出发地是诸如移动机器人20的当前位置、移动机器人20的前一个递送任务的递送目的地和接收待递送物品的场所等。目标目的地是诸如待递送物品的递送目的地、等待场所和充电场所等的场所。
64.这里,路线规划单元115在移动机器人20出发地和目的地之间设定通过点。路线规划单元115针对各个移动机器人20设定通过点的通过顺序。例如,通过点设定到路口、交叉口、电梯前的大厅及其周围。在狭窄通道中,移动机器人20难以彼此通过。在这些情况下,可以将狭窄通道前面的点设定为通过点。可以预先在楼层地图121中登记通过点的候选。
65.路线规划单元115从多个移动机器人20中确定执行各个递送任务所使用的移动机器人20,使得系统能够作为整体高效地执行任务。路线规划单元115优先将递送任务分配给等待状态下的移动机器人20或位于递送源附近的移动机器人20。
66.路线规划单元115针对被分配了递送任务的移动机器人20设定包括出发地和目标目的地在内的多个通过点。例如,当从递送源到递送目的地有两条以上的移动路线时,路线
规划单元115设定通过点使得移动机器人20能够以更短时间移动。因此,上层管理装置10基于相机图像等更新指示通道的拥挤状况的信息。具体地,其他移动机器人20正通过的场所和具有许多人的地点具有高的拥挤度。因此,路线规划单元115设定通过点以便于避开具有高拥挤度的场所。
67.存在这样的情况,其中移动机器人20能够以逆时针移动路线和顺时针移动路线移动到目标目的地。在这些情况下,路线规划单元115设定通过点以便于沿低拥挤的移动路线通行。由于路线规划单元115设定了到目标目的地的一个以上的通过点,因此移动机器人20能够沿不拥挤的移动路线移动。例如,当通道在路口或交叉口处被分支时,路线规划单元115适当地在路口、交叉口、转角及其周围设定通过点。这使得能够提高递送效率。
68.路线规划单元115可以基于电梯的拥挤状况、移动距离等设定通过点。上层管理装置10可以进一步估计在给定的移动机器人20计划通过给定场所时的移动机器人20的数量和人数。路线规划单元115可以根据估计的拥挤状况设定通过点。路线规划单元115还可以根据拥挤状况的变化动态地改变通过点。路线规划单元115为被分配了递送任务的移动机器人20按序设定通过点。通过点可以包括递送源和递送目的地。如稍后将描述的,移动机器人20自主移动以便于按序通过由路线规划单元115设定的通过点。
69.存储单元12是存储管理和控制机器人所需的信息的存储单元。在图2所示的示例中,示出了楼层地图121、机器人信息123、机器人控制参数122、属性信息124、路线规划信息125。然而,存储单元12中可以存储其他信息。算术处理单元11在执行各种处理的同时使用存储在存储单元12中的信息执行算术操作。存储在存储单元12中的各种信息能够被适当地更新。
70.楼层地图121是关于移动机器人20在其中移动的设施的地图信息。楼层地图121可以预先生成,基于从移动机器人20得到的信息生成,或可以通过将基于从移动机器人20得到的信息而准备的地图修正信息添加到预先生成的基本地图中而生成。
71.机器人信息123描述诸如由上层管理装置10管理的移动机器人20的id、型号和规格等的信息。机器人信息123可以包括指示移动机器人20的当前位置的位置信息。机器人信息123可以包括指示移动机器人20是执行任务中还是等待状态中的信息。机器人信息123可以包括指示移动机器人20是操作中、故障中等的信息。机器人信息123还可以包括关于能被递送的待递送物品和不能被递送的待递送物品的信息。
72.机器人控制参数122描述由上层管理装置10管理的移动机器人20的诸如与周边物体的阈值距离的控制参数。阈值距离是避免与包括人在内的周边物体接触的余量距离。机器人控制参数122可以进一步包括关于操作强度的信息,诸如移动机器人20的移动速度的速度上限。
73.机器人控制参数122可以基于如稍后将描述的属性信息被更新。机器人控制参数122可以包括指示收纳柜291的收纳空间的空缺状态和使用状态的信息。机器人控制参数122可以包括关于能够被递送的待递送物品和不能被递送的待递送物品的信息。机器人控制参数122与各个移动机器人20的各种信息相关联。
74.属性信息124是由属性信息获取单元114获取的属性信息。这里,关于设施中的人的属性信息与关于人的位置信息相关联地存储。
75.路线规划信息125包括关于路线规划单元115中规划的路线规划的信息。例如,路
线规划信息125包括指示递送任务的信息。路线规划信息125可以包括分配了任务的移动机器人20的id、起点、待递送物品的内容、递送目的地、到达递送目的地的估计到达时刻和递送截止时间。路线规划信息125可以与各个递送任务的各种信息相关联。路线规划信息125可以包括由用户u1输入的递送请求信息的至少一部分。
76.路线规划信息125可以进一步包括关于针对各个移动机器人20或针对各个递送任务的通过点的信息。例如,路线规划信息125包括指示各个移动机器人20的通过点的通过顺序的信息。路线规划信息125可以包括楼层地图121上的各个通过点的坐标和指示移动机器人20是否已经通过通过点的信息。
77.路线规划单元115参照存储在存储单元12中的各种信息来制定路线规划。例如,路线规划单元115基于楼层地图121、机器人信息123、机器人控制参数122和路线规划信息125来确定执行任务的移动机器人20。然后,路线规划单元115参照楼层地图121设定到递送目的地的通过点及其通过顺序。预先在楼层地图121中登记通过点的候选。路线规划单元115根据拥挤状况等设定通过点。在连续处理任务的情况下,路线规划单元115可以将递送源和递送目的地设定为通过点。
78.还能够将单个递送任务分配给两个以上的移动机器人20。例如,当待递送物品大于移动机器人20的可递送容量时,将待递送物品一分为二并装载到两个移动机器人20上。可替代地,当待递送物品重于移动机器人20的可递送重量时,将待递送物品一分为二并装载到两个移动机器人20上。以这种方式,两个以上的移动机器人20能够共享并执行一个递送任务。当然,在控制不同尺寸的移动机器人20的情况下,可以执行路线规划使得能够递送待递送物品的移动机器人20接收待递送物品。
79.此外,一个移动机器人20可以并行地执行两个以上的递送任务。例如,两个以上的待递送物品可以同时装载到一个移动机器人20上并依序递送到不同的递送目的地。可替代地,在一个移动机器人20递送一个待递送物品的同时,可以将另一个待递送物品装载到该移动机器人20上。而且,在不同场所装载的待递送物品可以具有相同递送目的地或不同的递送目的地。以这种方式,能够高效地执行任务。
80.在这些情况下,可以更新指示移动机器人20中的收纳空间的使用状态或空缺状态的收纳信息。换句话说,上层管理装置10能够通过管理指示空缺状态的收纳信息控制移动机器人20。例如,当完成了待递送物品的装载或接收时,收纳信息被更新。当输入递送任务时,上层管理装置10参照收纳信息并调遣具有足够空间来装载待递送物品的移动机器人20来接收待递送物品。以这种方式,一个移动机器人20能够同时执行多个递送任务,并且两个以上的移动机器人20能够共享并执行一个递送任务。例如,可以在移动机器人20的收纳空间中安装传感器以检测空缺状态。此外,可以预先登记各个待递送物品的容量和重量。
81.缓冲存储器13是累积由算术处理单元11执行的处理中生成的中间信息的存储器。通信单元14是用于与设置在使用系统1的设施中的环境相机300和至少一个移动机器人20进行通信的通信接口。通信单元14既能够执行有线通信也能够执行无线通信。例如,通信单元14向各个移动机器人20发送控制各个移动机器人20所需的控制信号。通信单元14还接收由移动机器人20和环境相机300收集的信息。
82.移动机器人20包括算术处理单元21、存储单元22、通信单元23和接近传感器(例如,距离传感器组24)、相机25、驱动单元26、显示单元27和操作接收单元28。图2仅示出了移
动机器人20中包括的典型的处理框。然而,移动机器人20包括未示出的许多其他处理框。
83.通信单元23是用于与上层管理装置10的通信单元14进行通信的通信接口。例如,通信单元23使用无线电信号与通信单元14进行通信。例如,距离传感器组24是输出指示与在移动机器人20周围存在的物体或人的距离的接近物体距离信息的接近传感器。例如,相机25拍摄图像以便掌握移动机器人20的周围的情况。相机25还能够拍摄例如设置在设施的天花板上的地点标记的图像。可以使用该地点标记使移动机器人20知道其自身的位置。
84.驱动单元26驱动设置在移动机器人20上的驱动轮。驱动单元26还可以具有检测驱动轮及其驱动电机的转数的编码器。可以根据编码器的输出估计移动机器人20的自身位置(当前位置)。移动机器人20检测自身当前位置,并向上层管理装置10发送自身当前位置。
85.显示单元27和操作接收单元28利用触摸面板显示器实现。显示单元27显示用作操作接收单元28的用户界面屏幕。显示单元27可以显示移动机器人20的目的地和指示移动机器人20的状态的信息。操作接收单元28从用户接收操作。操作接收单元28包括显示在显示单元27上的用户界面屏幕,以及设置在移动机器人20上的各种开关。
86.算术处理单元21执行用于移动机器人20的控制的算术操作。例如,算术处理单元21能够实施为能够执行程序的装置,例如计算机的中央处理单元(cpu)。各种功能还能够由程序实现。算术处理单元21包括移动命令提取单元211、驱动控制单元212和属性信息获取单元214。图2仅示出算术处理单元21中包括的典型的处理框。然而,算术处理单元21可以包括未示出的处理框。算术处理单元21还可以搜索通过点之间的路线。
87.移动命令提取单元211从上层管理装置10给出的控制信号提取移动指令。例如,移动命令包括关于下一个通过点的信息。例如,控制信号可以包括通过点的坐标和关于通过点的通过顺序的信息。移动命令提取单元211提取这些信息作为移动命令。
88.移动命令可以进一步包括指示能够向下一个通过点移动的信息。当通道宽度狭窄时,移动机器人20可能无法彼此通过。而且,还存在一些通道暂时关闭的情况。在这些情况下,控制信号包括使移动机器人20在应停止的场所前的通过点处停止的指令。然后,在另外的移动机器人已经通过或在该通道变得可通过后,上层管理装置10输出指示移动机器人20可移动的控制信号。这使得处于暂时停止状态的移动机器人20重新开始移动。
89.驱动控制单元212基于从移动命令提取单元211给出的移动命令控制驱动单元26移动移动机器人20。例如,驱动单元26具有根据来自驱动控制单元212的控制命令值旋转的驱动轮。移动命令提取单元211提取移动命令以便于使移动机器人20朝向从上层管理装置10接收的通过点移动。驱动单元26然后旋转地驱动驱动轮。移动机器人20朝向下一个通过点自主移动。以这种方式,移动机器人20依序地通过通过点并且到达递送目的地。移动机器人20可以估计其自身位置,并且向上层管理装置10发送指示移动机器人20已经通过通过点的信号。因此,上层管理装置10能够管理各个移动机器人20的当前位置和递送状态。
90.与属性信息获取单元114相同,属性信息获取单元214获取关于人的属性的信息。属性信息获取单元214基于由移动机器人20的相机25获取的图像获取关于移动机器人20周围存在的人的属性的信息。在以下描述中,上层管理装置10中的属性信息获取单元114主要执行独自获取属性信息的处理。然而,移动机器人20中的属性信息获取单元214可以执行获取属性信息的处理。可替代地,属性信息获取单元114和属性信息获取单元214可以通过彼此协同或划分各自的角色来执行获取属性信息的处理。而且,可以省略属性信息获取单元
114和属性信息获取单元214中的至少一个。
91.存储单元22存储楼层地图221和机器人控制参数222。图2示出了存储在存储单元22中的信息中的一些。存储单元22还可以存储除图2中示出的楼层地图221和机器人控制参数222之外的信息。楼层地图221是关于移动机器人20在其中移动的设施的地图信息。例如,楼层地图221是从上层管理设备10下载的楼层地图121。可以预先准备楼层地图221。楼层地图221还可以是部分地包括移动机器人20计划要行驶的区的地图信息,而不是关于整个设施的地图信息。
92.机器人控制参数222是用于操作移动机器人20的参数。例如,机器人控制参数222包括与周边物体的距离的阈值。机器人控制参数222可以进一步用作设定移动机器人的操作强度的上限的设定单元。具体地,机器人控制参数222包括移动机器人20的速度上限。可替代地,当移动机器人20具有机械臂时,操作强度可以是机械臂的操作速度。
93.驱动控制单元212参照机器人控制参数222,并响应于从距离传感器组24得到的距离信息变得低于距离阈值而使其操作停止或减速。驱动控制单元212控制驱动单元26以便于以等于或低于速度上限的速度行驶。驱动控制单元212限制驱动轮的旋转速度,使得移动机器人20不以高于速度上限的速度移动。
94.与属性信息124相同,属性信息224由属性信息获取单元214或属性信息获取单元114获取。属性信息224是关于移动机器人20的前进方向上的前方的行驶区域中存在的人的属性的信息。因此,属性信息224可以仅是属性信息124中的关于移动机器人20的附近的一些人的信息。
95.移动机器人20的配置
96.这里,将描述移动机器人20的外观。图3示出移动机器人20的示意图。图3中示出的移动机器人20是移动机器人20的一个方案。移动机器人20可以具有任意其他配置。在图3中,x方向是移动机器人20的前进方向和后退方向,y方向是移动机器人20的左右方向,并且z方向是移动机器人20的高度方向。
97.移动机器人20包括主体单元290和台车(truck)单元260。主体单元290安装在台车单元260的顶部上。主体单元290和台车单元260分别具有长方体的壳体,并且其中安装了各个组成构件。例如,驱动单元26收纳在台车单元260中。
98.主体单元290包括用作收纳空间的收纳柜291和密封收纳柜291的门292。收纳柜291具有多层货架,并且针对各层货架管理空缺状态。例如,通过在各层货架中布置各种传感器(诸如重量传感器),能够更新空缺状态。移动机器人20自主移动以将收纳在收纳柜291中的待递送物品递送到由上层管理装置10指定的目标目的地。主体单元290可以在壳体中包括控制箱等(未示出)。门292可以利用电子钥匙等进行锁定。在到达递送目的地时,用户u2利用电子钥匙对门292进行解锁。可替代地,在到达递送目的地时,门292可以自动地打开。
99.如图3中所示,作为距离传感器组24的前后距离传感器241和左右距离传感器242设置在移动机器人20的外部上。移动机器人20利用前后距离传感器241测量在移动机器人20的前后方向上与周边物体的距离。移动机器人20也利用左右距离传感器242测量在移动机器人20的左右方向上与周边物体的距离。
100.例如,前后距离传感器241布置在主体单元290的壳体的前表面和后表面上。左右
距离传感器242设置在主体单元290的壳体的左侧表面和右侧表面上。例如,前后距离传感器241和左右距离传感器242是超声波距离传感器或激光测距仪。前后距离传感器241和左右距离传感器242检测与周边物体的距离。当通过前后距离传感器241或左右距离传感器242检测到的与周边物体的距离变成距离阈值或小于距离阈值时,移动机器人20减速或停止。
101.驱动单元26装备有驱动轮261和脚轮262。驱动轮261是用于使移动机器人20向前、向后、向左和向右移动的轮子。脚轮262是不施加驱动力的从动轮。脚轮262通过跟随驱动轮261进行旋转。驱动单元26具有驱动电机(未示出)以驱动驱动轮261。
102.例如,驱动单元26在壳体中支撑两个驱动轮261和两个脚轮262,两个驱动轮261和两个脚轮262中的各个与行驶表面接触。两个驱动轮261具有设置以便于彼此重合的旋转轴。各个驱动轮261由未示出的电机独立驱动。驱动轮261响应于来自图2中的驱动控制单元212的控制命令值旋转。脚轮262是从动轮,其设置成使得从驱动单元26竖直地延伸的枢转轴远离轮子的旋转轴的一定距离支撑轮子。脚轮262跟随以便于追随驱动单元26的移动方向。
103.例如,当两个驱动轮261以相同旋转速度在相同方向上旋转时,移动机器人20向前移动,而当两个驱动轮261以相同旋转速度在相反方向上旋转时,移动机器人20围绕大致延伸通过两个驱动轮261的中心的垂直轴线枢转。当两个驱动轮261在相同方向上以不同旋转速度旋转时,移动机器人20能够在移动的同时左转和右转。例如,通过使左驱动轮261的旋转速度高于右驱动轮261的旋转速度,移动机器人20能够进行右转。相反,通过使右驱动轮261的旋转速度高于左驱动轮261的旋转速度,移动机器人20能够进行左转。这意味着通过控制两个驱动轮261中的旋转方向和旋转速度,移动机器人20能够在任意方向上直行、枢转、右转和左转等。
104.移动机器人20在主体单元290的上表面上还具有显示单元27和操作界面281。显示单元27显示操作界面281。当用户触摸并且操作显示在显示单元27上的操作界面281时,操作接收单元28能够接收用户指令。在显示单元27的上表面上还设置有紧急停止按钮282。紧急停止按钮282和操作界面281用作操作接收单元28。
105.例如,显示单元27是液晶面板。显示单元27显示作为图示的人物面部,并且通过文本或图标显示关于移动机器人20的信息。当在显示单元27上显示人物面部时,能够对移动机器人20周围的观察者给出显示单元27是假的面部的印象。还能够使用安装在移动机器人20中的显示单元27等作为用户终端400。
106.相机25安装在主体单元290的前表面上。在这个示例中,两个相机25用作立体相机。换句话说,具有相同视角的两个相机25彼此水平分离地布置。由相机25拍摄的图像作为图像数据输出。基于来自两个相机25的图像数据,能够计算与对象的距离和对象的尺寸。算术处理单元21能够通过分析相机25的图像来检测在移动方向上的前方的人和障碍物。如果在前进方向上的前方存在人或障碍物,则移动机器人20在躲避他们的同时沿路线移动。向上层管理装置10发送来自相机25的图像数据。
107.移动机器人20分析从相机25输出的图像数据以及从前后距离传感器241和左右距离传感器242输出的检测信号,并且从而识别周边物体或识别自身位置。相机25拍摄移动机器人20的前进方向上的前方区域。如图中所示,移动机器人20的前方区域是位于安装了相
机25的移动机器人20的一侧。换句话说,在正常移动期间,移动机器人20的向前方向是以箭头表示的前进方向。
108.属性信息
109.现在描述由图2中的属性信息获取单元114获取的属性信息124。属性信息是指示设施中存在的人的属性的信息。设施由大量不特定的人使用,诸如设施工作人员、设施用户和访客。设施工作人员包括医生、护士、护理人员、药剂师、工程师和物理治疗师。还有除医护人员之外的设施人员,例如it部门人员。用户包括住院患者和门诊患者。此外,住院患者的访客和门诊患者的陪同者也使用设施。访客包括设备、必需品和药物的供应者。
110.在诸如医院的医疗福利设施中,有许多用户是残疾人,如带有残疾的人。许多用户使用例如轮椅、拐杖、步行器、扶手、步行手推车和手杖等行走。一些用户带着输液架行走。这些行走有困难的人比健全人行走地慢。老人和儿童可能也慢速行走。因此,当移动机器人20接近行走有困难的人时,对于行走有困难的人而言无法迅速避开移动机器人20。
111.因此,在本实施例中,属性信息获取单元114获取关于存在于各个移动机器人20的周围的人的属性信息。机器人控制单元111能够根据属性信息改变移动机器人20的速度上限。例如,当使用拐杖行走的行走有困难的人在移动机器人20的附近时,移动机器人20的速度上限降低。以这种方式,行走有困难的人无需担心就能在移动机器人20附近行走。
112.具体地,环境相机300和机器人的相机25拍摄移动机器人20的移动方向上的前方的行驶区域。然后,属性信息获取单元114基于来自相机25和环境相机300的图像数据获取关于行驶区域中存在的人或多个人的信息。例如,属性信息获取单元114使用图像分析以检测图像中的人。然后,属性信息获取单元114判定图像中的人是否正使用任何设备。属性信息获取单元114通过图像分析识别助行器,如步行器、拐杖和手杖。属性信息获取单元114还识别轮椅、输液架等。属性信息获取单元114能够获取各个属性信息。属性信息获取单元114可以进一步根据使用中的设备确定速度上限。
113.属性信息可以包括指示人是否为医疗工作人员的信息。当属性信息获取单元114检测到人时,属性信息获取单元114估计该人是否为医疗工作人员。可替代地,当使医疗工作人员携带用于短程无线电通信的非接触ic卡时,能够省略导致高处理负荷的物体的检测。
114.例如,医疗工作人员通常穿着制服,这使得通过图像分析可以容易地确定他们。由于医疗工作人员很有可能是诸如医生、护士、护理人员、药剂师和物理治疗师的职工,很有可能的是他们能够以正常行走速度行走。在设施中工作的医疗工作人员对移动机器人20的操作熟悉。当检测到的人是医疗工作人员时,机器人控制单元111维持高速上限。可替代地,当检测到由作为医疗工作人员的职工佩戴的姓名标签时,属性信息获取单元114确定具有姓名标签的人为医疗工作人员。当检测到通常由医疗工作人员握持的医疗设备(诸如听诊器)时,属性信息获取单元114确定握持着医疗设备的人作为医疗工作人员。在这些情况下,机器人控制单元111也维持高速上限。
115.当检测到的人是除医疗工作人员之外的一般用户时,机器人控制单元111降低速度上限。由于除医疗工作人员之外的一般用户不具有关于移动机器人20的操作的知识,他们可以突然地接近移动机器人20。因此,针对移动靠近一般用户的移动机器人20,机器人控制单元111设定较低的速度上限。这使得可以安全和高效地执行任务。
116.属性信息包括关于年龄的信息。例如,当检测到的人是一般用户时,速度上限可以根据用户的年龄而变化。属性信息获取单元114估计一般用户的年龄。属性信息获取单元114可以根据一般用户的年龄进一步降低速度上限。根据年龄,属性信息获取单元114可以判定婴儿、儿童、未成年人、老人、成年人等。例如,当存在老人或婴儿时,速度上限可以进一步降低。这意味着人根据年龄而分类,并且速度上限仅在存在老人或婴儿的情况下进一步降低。
117.属性信息可以包括指示健全人或残疾人的信息。当行驶区域中存在的人使用手杖、拐杖、步行器、石膏绷带、输液架、轮椅等时,速度上限进一步降低。当通过图像分析检测到正使用助行器或轮椅的人时,属性信息获取单元114确定该人为行走有困难的人。在这种情况下,机器人控制单元111将速度上限降至最低。当检测到特定的装置或人时,可以将移动机器人20的速度上限设定为0。换句话说,当检测到特定的装置或人时,移动机器人20可以被暂时地停止。
118.以这种方式,机器人控制单元111根据关于行驶区域中存在的人或多个人的属性信息设定速度上限。然后,上层管理装置10向移动机器人20发送速度上限。发送的速度上限存储在机器人控制参数222中。移动机器人20以等于或小于速度上限的速度行驶。例如,驱动控制单元212控制驱动轮261的旋转速度使得移动机器人20在行走有困难的人的附近以等于或小于速度上限的速度移动。以这种方式,能够更多地提高安全性并且更高效地执行任务处理。这使得执行适合于医疗福利设施中的情况的高效控制成为可能。
119.机器人控制单元111根据属性信息按阶段设定速度上限。当仅存在医疗工作人员时,使用高速模式。在高速模式中,例如,速度上限是3km。当存在任何使用手杖、拐杖、石膏绷带、输液架或轮椅的行走有困难的人时,使用低速模式。当存在任何的婴儿或老人时,使用低速模式。在低速模式中,例如,速度大约是0.5km/h。当存在一般用户,但不存在行走有困难的人,没有老人和婴儿时,使用中速模式。在中速模式中,速度大约是1km/h。当然,本实施例不限于按阶段设定的速度或速度上限。
120.速度上限还可以针对设施中的各个区域而变化。可以预先将设施划分为多个区域,并且可以针对各个区域设定速度上限。例如,楼层地图121、221可以包括关于速度上限的信息。在仅允许医疗工作人员的职工专属区域中速度上限可以较高,并且在存在除医疗工作人员之外的一般用户的区域中速度上限可以较低。具体地,在一般用户能够进入的区域(如设施的入口周围和接待区域)中,将速度上限设定得较低。可以将医疗工作人员能够通过出示(presenting)id等进入的区域设定为职工专属区域。
121.通过收集环境相机300和移动机器人20的相机25的图像,可以在任何时间进行更新楼层地图121和221中包括的速度上限。例如,当在检测点处检测到行走有困难的人、老人和儿童时,可以在楼层地图中降低检测点处及其附近的速度上限。当行走有困难的人、老人和儿童已经从检测点中移出时,楼层地图中的速度上限可以恢复到初始值。上层管理装置10向移动机器人20发送包括关于速度上限的信息。上层管理装置10发送楼层地图的在各个移动机器人20的附近的一些部分。移动机器人20可以从楼层地图221读取速度上限。
122.属性信息获取单元114的至少一些处理可以由环境相机300或移动机器人20执行。例如,安装在环境相机300或移动机器人20上的处理器可以执行图像分析以确定人的属性。然后,上层管理装置10可以从环境相机300或移动机器人20接收属性信息。
123.示例1
124.图4是用于获取属性信息的示例1的说明性视图。在图4中,基于安装在移动机器人20上的相机25的图像得到属性信息。假设移动机器人20沿路线r从通过点m1移动到通过点m2。在移动方向上的前方的行驶区域a中,存在人p1和人p2。行驶区域a是移动机器人20的前方的并且从移动机器人20起延伸超过规定距离的区域。
125.相机25拍摄移动方向上的前方的行驶区域a。因此,人p1和人p2存在于相机25的图像中。上层管理装置10接收相机25的图像数据。属性信息获取单元114通过分析相机25的图像获取关于人p1和人p2的属性信息。例如,当人p2正使用助行器时,设定最低速度上限。当行驶区域a中存在的人p1和人p2都为医疗工作人员时,设定最高速度上限。
126.在示例1中,移动机器人20能够独自地设定速度上限。在这种情况下,移动机器人20中的属性信息获取单元214获取属性信息。相机25拍摄移动机器人20的移动方向上的前方的图像。算术处理单元21可以分析相机25的图像,并且从而属性信息获取单元214可以获取关于行驶区域中存在的人的属性信息。
127.示例2
128.图5是用于获取属性信息的示例2的说明性视图。在示例2中,假设移动机器人20沿路线r从通过点m1移动到通过点m2。更具体地,移动机器人20沿路线r右转。
129.因此,基于安装在设施中的环境相机300的图像,属性信息获取单元114获取关于人p1和人p2的属性信息。例如,在交叉口或拐角处,在移动方向上的前方的行驶区域a中形成了相机25的盲点。因此,在示例2中,属性信息获取单元114基于安装在拐角处的环境相机300的图像获取属性信息。以这种方式,能够在移动机器人20到达拐角前设定速度上限。
130.例如,上层管理装置10接收环境相机300的图像数据。属性信息获取单元114分析环境相机300的图像,并且从而获取关于行驶区域a中的人p1的属性信息。例如,当人p1正使用助行器时,使用低速模式。当环境相机300的图像中的人p1是医疗工作人员时,使用高速模式。当然,在示例2中,可以使用来自移动机器人20的相机25的图像确定属性信息。
131.通过移动机器人20的属性信息获取单元214对来自环境相机300的图像数据执行图像处理可以生成属性信息。在这种情况下,向移动机器人20发送环境相机的图像数据。
132.示例3
133.图6是用于获取属性信息的示例3的说明性视图。在示例3中,除了图5中示出的配置之外,移动机器人20从相反方向沿路线ra在拐角处左转。在行驶区域a中,还存在人p3。在示例3中,基于来自环境相机300、移动机器人20的相机25和移动机器人20a的相机25a的图像,属性信息获取单元114获取关于人p1到人p3的各个的属性信息。换句话说,基于从多个方向拍摄的行驶区域a的图像,属性信息获取单元114获取属性信息。
134.在图6中,行驶区域a中存在人p1到p3。在环境相机300与人p3之间存在人p2。因此,有可能环境相机300仅能够部分地拍摄人p3。当仅部分地拍摄到人p3时,难以通过图像分析确定属性。因此,在本实施例中,属性信息获取单元114基于移动机器人20a的相机25a的图像获取属性信息。
135.以这种方式,能够准确地确定行驶区域a中存在的所有人p1到p3的属性。换句话说,当不存在在行驶区域a中从相反方向移动的移动机器人20a时,无法拍摄人p3。通过以这种方式使用具有不同拍摄方向的多个相机,能够提高通过图像分析处理确定属性的精度。
136.注意,可以从移动机器人20a的相机25a拍摄的图像获取属性信息。移动机器人20a可以直接向移动机器人20发送属性信息和关于人p3的位置信息。当然,移动机器人20a可以向上层管理装置10发送属性信息。然后,管理移动机器人20的当前位置的上层管理装置10可以向移动机器人20发送关于人p3的属性信息。
137.当人p1、p2是医疗工作人员并且人p3是行走有困难的人时,机器人控制单元111将速度上限设定为最低。通过以这种方式使用多个相机,能够减少盲点。这使得提高确定关于人的属性信息的精度成为可能。因此,移动机器人20能够更安全和高效地执行递送任务。
138.图7是示出根据本实施例的控制方法的流程图。图7示出路线规划后待执行的处理,路线规划是响应于递送请求而执行的。换句话说,图7示出在移动机器人20正移动的同时上层管理装置10的处理。
139.首先,属性信息获取单元114获取属性信息(s701)。例如,环境相机300和相机25拍摄前进方向上的前方的行驶区域。上层管理装置10从环境相机300和相机25接收图像。上层管理装置10基于图像获取关于行驶区域中存在的人的属性信息。
140.接下来,算术处理单元11基于属性信息设定移动机器人20的操作的上限(s702)。例如,当行驶区域中存在除医疗工作人员之外的一般用户时,算术处理单元11降低速度上限。当一般用户是行走有困难的人时,算术处理单元11进一步降低速度上限。
141.基于以这种方式设定的上限,机器人控制单元111执行机器人控制(s703)。换句话说,当更新了速度上限时,上层管理装置10向移动机器人20发送速度上限。移动机器人20以等于或小于速度上限的速度行驶。
142.以这种方式,能够实现移动机器人的适当的控制。例如,当行驶区域中存在行走有困难的人、老人或婴儿时,移动机器人20以低速模式移动。当行驶区域中仅存在医疗工作人员时,移动机器人20以高速模式移动。因此,能够安全和高效地处理任务。
143.而且,上层管理装置10、移动机器人20等中的处理的部分或全部能够实现为计算机程序。这样的程序能够使用各种类型的非暂时性计算机可读介质存储并提供给计算机。非暂时性计算机可读介质包括各种类型的有形存储介质。非暂时性计算机可读介质的示例包括磁记录介质(例如软盘、磁带、硬盘驱动器)、磁光记录介质(例如磁光盘)、只读光盘存储器(cd-rom)、cd-r、cd-r/w、半导体存储器(例如掩模型rom、可编程rom(prom)、可擦prom(eprom)、闪存rom和随机存取存储器(ram))。程序可以通过使用各种类型的暂时性计算机可读介质提供给计算机。暂时性计算机可读介质的示例包括电信号、光信号和电磁波。暂时性计算机可读介质能够经由诸如电线和光纤的有线通信路径或无线通信路径将程序提供给计算机。
144.注意,本发明不限于公开的实施例并且在不背离本发明的范围的情况下可以进行适当的修改。例如,在公开的实施例中,描述了包括在医院内部自主移动的递送机器人的系统。然而,该系统允许在酒店、餐厅、办公楼、活动场所或综合设施中将规定物作为物品进行递送。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1