石油平台矩形电气间的大型设备搬运多点协同作业方法与流程
1.本发明涉及大型设备搬运多点协同作业方法,尤其涉及海洋石油平台的电气间模块大型设备搬运多点协同作业方法。
背景技术:
2.由于fpso项目模块化设计越来越精巧,电气间模块中又存在着这大量地电气设备,且电气设备的维修维护非常频繁。而受尺寸空间重量等限制,电气间又不能无限制加高加宽,传统吊装不能满足装卸传运需求,而现阶段电气间模块内电气设备传运多采用人工搬运作业,自动化程度低,费时费力,工作效率较低。
3.技术方案
4.本发明的目的在于克服已有技术的不足,提供一种石油平台矩形电气间的大型设备搬运多点协同作业方法。该方法提高了电气间模块内大型电气设备的搬运效率,进而提高电气间内设备的维护维修工作效率。
5.本发明的石油平台矩形电气间的大型设备搬运多点协同作业方法,包括以下步骤:
6.步骤一、以矩形电气间地面、左壁、后壁所形成的直角坐标系为模块绝对坐标系osx
syszs
,其中osx
sys
平面为地面,osx
szs
平面为左壁,o
syszs
平面为后壁,由后壁指向前壁的方向设定为xs轴正方向,指向右侧的方向设定为ys轴正方向,zs轴以竖直向上的方向为正方向,三个面所汇交的os点为原点;
7.步骤二、在矩形电气间内设置计算机,计算机内安装c++开发的视频采集软件,计算机通过通信线分别与三台葫芦吊的伺服电机相连,在三个伺服电机的底部固定有可360
°
旋转的摄像机,同时在矩形电气间的四个拐角处布置4台全站仪,在电气间内顶壁上前后平行间隔设置有三条轨道,所述的三条轨道均与ys轴互相平行,三台葫芦吊的伺服电机通过滚轮各自与一条轨道滑动连接,每台葫芦吊的导链与电气间底面垂直距离均为h,第一导链初始位置在处,第二导链初始位置在处,第三导链初始位置在处,待搬运重物的顶壁中心点p1在坐标系osx
syszs
下的坐标为(x0,y0,0),搬运终点为p2坐标为(x2,y2,0),调整三个导链长度,使三个导链的吊钩沿各自轨道分别移动至(x1,y0,h)、(x2,y0,h)、(x3,y0,h),人工将三个导链均与待搬运的重物连接,等待搬运,此时三个导链的长度分别为l1、l2、l3;
8.步骤三、三个导链同时缩短使大型设备沿竖直上升,重物上升的距离为h,然后计算出三个导链的长度分别为l1’
、l2’
、l3’
;
9.步骤四、保持l1’
、l2’
、l3’
的长度不变,三个导链同时沿ys轴,朝着p2点方向移动,沿着ys方向移动过程中,摄像机对移动路径上的障碍物信息进行录像,然后将录像信息传输给计算机,计算机内视频采集软件将录像信息进行处理,在视频采集软件中记录移动区域是否存在障碍物,如果沿着ys轴方向移动过程中无障碍物,则在计算机的视频采集软件上
标记为绿色区域,重物持续移动到ys=y2处,停止三个导链沿ys轴的移动,保持重物的上升距离h不变,改变三个导链的长度使重物沿xs轴,朝着p2点方向移动,同时摄像机旋转角度,对xs轴方向的障碍物信息进行摄像,将摄像信息传输到计算机的视频采集软件中,计算机在视频采集软件中记录移动过程中是否存在障碍物,重物持续移动到xs=x2处,停止三个导链长度变化,进行步骤八,如果在沿着ys轴方向移动过程中存在障碍物则进行步骤五,在沿着xs轴方向移动过程中存在障碍物则进行步骤六,如果在移动过程中xs轴方向和ys轴方向同时存在障碍物,则进行步骤七;
10.步骤五、如果沿ys轴方向移动遇到障碍物时,重物停止沿ys轴方向的移动,调整三个导链的长度,使得重物沿着xs轴方向移动,当跨过障碍物后,重物继续沿着ys轴方向移动,在计算机的视频采集软件上将障碍物区域标记为红色区域,返回步骤四,重新判断,直到重物持续移动到ys=y2处,停止三个导链沿ys轴方向的移动,三个导链的长度变化为l
1”、l
2”、l
3”;
11.步骤六、如果沿xs轴方向移动遇到障碍物时,在计算机的视频采集软件上将障碍物标记为红色区域,三个导链停止长度变化,保持三个导链的长度不变,使得重物沿着ys轴方向移动,移动过程中摄像机不断的进行录像,将采集的图像传输到计算机的视频采集软件中,计算机的视频采集软件同时判断ys轴方向是否存在障碍物,如果ys轴方向存在障碍物,则进行步骤五,如果不存在障碍物则进行步骤四;
12.步骤七、当xs轴与ys轴同时遇到障碍物时,若此时导链沿xs轴方向运动,则停止当前方向运动,转而沿xs轴相反方向运动至在视频采集软件中标记为绿色无障碍物区域内,停止沿xs轴方向运动;同时沿ys轴相反方向运动至有计算机在视频采集软件中标记的区域绿色内,停止沿ys轴方向运动,矩形电气间拐角处的全站仪测量出障碍物的高度h2,将障碍物的高度h2通过通信线输入到计算机的视频采集软件中,计算机的视频采集软件提取障碍物的高度信息比较xs轴与ys轴障碍物的高度h2数据,选出较高的障碍物的高度h2,调整三个导链的长度,将重物提高到大于障碍物的高度h2的0.5m处,返回步骤四重新判断;
13.步骤八、移动到p2点后伸长三个导链,将重物放至p2点。
14.与现有技术相比较,采用本发明的优点在于:本发明实现了石油平台矩形电气间模块内大型设备搬运多点协同作业,通过多个导链协同移动待维修的大型设备至指定位置,从而减少人工搬运,使设备搬运轨迹合理化、高效化,提高电气间模块内大型电气设备的搬运效率,进而提高电气间内设备的维护维修工作效率。
附图说明
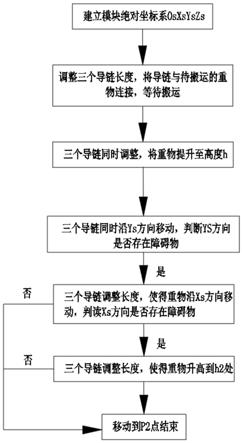
15.图1为本发明石油平台矩形电气间的大型设备搬运多点协同作业方法的流程图;
16.图2为本发明矩形电气间模块空间立体示意图;
17.图3为本发明多点协同作业搬运重物竖直方向移动示意图;
18.图4为本发明多点协同作业搬运重物沿ys方向移动明示意图;
19.图5为本发明多点协同作业搬运重物沿xs方向移动示意图;
20.图6为本发明多点协同作业搬运重物轨迹示意图。
具体实施方式
21.下面结合附图和具体实施例对本发明加以说明。
22.本发明石油平台矩形电气间的大型设备搬运多点协同作业方法,包括以下步骤:
23.步骤一、以矩形电气间地面、左壁、后壁所形成的直角坐标系为模块绝对坐标系osx
syszs
,其中osx
sys
平面为地面,osx
szs
平面为左壁,o
syszs
平面为后壁,由后壁指向前壁的方向设定为xs轴正方向,指向右侧的方向设定为ys轴正方向,zs轴以竖直向上的方向为正方向,三个面所汇交的os点为原点;
24.步骤二、在矩形电气间内设置计算机,计算机内安装c++开发的视频采集软件,计算机通过通信线分别与三台葫芦吊的伺服电机相连,在三个伺服电机的底部固定有可360
°
旋转的摄像机,同时在矩形电气间的四个拐角处布置4台全站仪,在电气间内顶壁上前后平行间隔设置有三条轨道,所述的三条轨道均与ys轴互相平行,三台葫芦吊的伺服电机通过滚轮各自与一条轨道滑动连接,每台葫芦吊的导链与电气间底面垂直距离均为h,即第一导链初始位置在处,可以沿ys方向移动,第二导链初始位置在处,可以沿ys方向移动,第三导链初始位置在处,可以沿ys方向移动,待搬运重物的顶壁中心点p1在坐标系osx
syszs
下的坐标为(x0,y0,0),搬运终点为p2坐标为(x2,y2,0),调整三个导链长度,使三个导链的吊钩沿各自轨道分别移动至(x1,y0,h)、(x2,y0,h)、(x3,y0,h),人工将三个导链均与待搬运的重物连接,等待搬运,此时三个导链的长度分别为l1、l2、l3;
25.步骤三、三个导链同时缩短使大型设备沿竖直上升,重物上升的距离为h,然后用公式计算出三个导链的长度分别为:
[0026][0027][0028][0029]
式中:l1’
表示第一导链的吊钩在重物上升到高度h时的长度;l2’
表示第二导链的吊钩在重物上升到高度h时的长度;l3’
表示第三导链的吊钩在重物上升到高度h时的长度。
[0030]
步骤四、保持l1’
、l2’
、l3’
的长度不变,三个导链同时沿ys轴,朝着p2点方向移动,沿着ys方向移动过程中,摄像机对移动路径上的障碍物信息进行录像,然后将录像信息传输给计算机,计算机内视频采集软件将录像信息进行处理,在视频采集软件中记录移动区域是否存在障碍物,如果沿着ys轴方向移动过程中无障碍物,则在计算机的视频采集软件上标记为绿色区域,重物持续移动到ys=y2处,停止三个导链沿ys轴的移动,保持重物的上升距离h不变,改变三个导链的长度使重物沿xs轴,朝着p2点方向移动,同时摄像机旋转角度,对xs轴方向的障碍物信息进行摄像,将摄像信息传输到计算机的视频采集软件中,计算机在视频采集软件中记录移动过程中是否存在障碍物,重物持续移动到xs=x2处,停止三个导链长度变化,进行步骤八,如果在沿着ys轴方向移动过程中存在障碍物则进行步骤五,在沿着xs轴方向移动过程中存在障碍物则进行步骤六,如果在移动过程中xs轴方向和ys轴方向同时存在障碍物,则进行步骤七;
[0031]
步骤五、如果沿ys轴方向移动遇到障碍物时,重物停止沿ys轴方向的移动,调整三
个导链的长度,使得重物沿着xs轴方向移动,当跨过障碍物后,重物继续沿着ys轴方向移动,在计算机的视频采集软件上将障碍物区域标记为红色区域,返回步骤四,重新判断,直到重物持续移动到ys=y2处,停止三个导链沿ys轴方向的移动,三个导链的长度变化如下:
[0032][0033][0034][0035]
式中:x0’
为重物的顶壁中心点在xs轴上的坐标,l
1”表示第一导链在重物移动至x=x0’
时的长度;l
2”表示第二导链在重物移动至x=x0’
时的长度、l
3”表示第三导链在重物移动至x=x0’
时的长度。
[0036]
步骤六、如果沿xs轴方向移动遇到障碍物时,在计算机的视频采集软件上将障碍物标记为红色区域,三个导链停止长度变化,保持三个导链的长度不变,使得重物沿着ys轴方向移动,移动过程中摄像机不断的进行录像,将采集的图像传输到计算机的视频采集软件中,计算机的视频采集软件同时判断ys轴方向是否存在障碍物,如果ys轴方向存在障碍物,则进行步骤五,如果不存在障碍物则进行步骤四;
[0037]
步骤七、当xs轴与ys轴同时遇到障碍物时,若此时导链沿xs轴方向运动,则停止当前方向运动,转而沿xs轴相反方向运动至在视频采集软件中标记为绿色无障碍物区域内,停止沿xs轴方向运动;同时沿ys轴相反方向运动至有计算机在视频采集软件中标记的区域绿色内,停止沿ys轴方向运动,矩形电气间拐角处的全站仪测量出障碍物的高度h2,将障碍物的高度h2通过通信线输入到计算机的视频采集软件中,计算机的视频采集软件提取障碍物的高度信息比较xs轴与ys轴障碍物的高度h2数据,选出较高的障碍物的高度h2,调整三个导链的长度,将重物提高到大于障碍物的高度h2的0.5m处,返回步骤四重新判断;
[0038]
步骤八、移动到p2点后伸长三个导链,将重物放至p2点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1