线性稳压器、线性稳压器的频率补偿方法及系统与流程
线性稳压器、线性稳压器的频率补偿方法及系统
优先权声明
1.本专利申请引用并要求于2021年5月3日提交的、申请号为202141020193、名称为“ldo中快速间接负载电流感测的方法”的未决临时印度专利申请的优先权,以及引用并要求于2021年12月2日提交的申请号为17/457,266的美国专利申请的优先权,将其二者全部内容并入本文。
技术领域
2.本技术实施例总体上涉及电源电路,并且更具体地,涉及用于线性稳压器中的频率补偿的负载电流感测。
背景技术:
3.在相关领域中众所周知的是,电压稳压器是指从输入端接收的输入电压在输出端产生稳定的(调节的)输出电压的组件或设备。一般来说,无论由输出电压供电的负载可能汲取的负载电流的大小或输入电压的大小变化,都力求将输出电压维持在固定水平。
4.线性稳压器使用在线性区域中操作的传递元件,该传递元件位于输入端和输出端之间,并且调节传递元件的电阻以将输出电压维持在期望的恒定水平。通常采用负反馈回路来调整传输元件的电阻,以将输出电压维持在恒定水平。
5.频率补偿是线性稳压器中常用的一种技术。该技术通常用于确保输出电压的稳定性(例如,防止振铃),并且还用于避免在线性稳压器中正常工作的负反馈回路中可能出现的正反馈。
6.至少当在输出端处使用输出电容时,通常需要感测负载电流以进行频率补偿。
技术实现要素:
7.本技术的多个方面涉及在线性稳压器中感测负载电流以用于频率补偿。
8.本技术部分实施例提供一种线性稳压器,包括:传输晶体管,所述传输晶体管的第一电流端被耦接以接收输入电压,第二电流端被耦接到所述线性稳压器的输出节点,并提供调节后的输出电压;误差放大器,其被耦接以接收第一输入端上的参考电压和第二输入端上的反馈电压;所述反馈电压源自所述调节后的输出电压;所述误差放大器设计成:生成表示所述参考电压和所述反馈电压的差值的误差信号;第一驱动级,其耦接在所述误差放大器和所述传输晶体管之间,所述第一驱动级的第一晶体管具有被耦接以接收所述误差信号的控制端,其中所述传输晶体管的控制端被耦接以接收所述第一驱动级的输出;补偿电路,用于所述线性稳压器的频率补偿;和补偿调整电路,用于感测通过所述第一驱动级的第一晶体管的电流的大小,并基于所述电流的大小调整所述补偿电路的参数。
9.在一些实施例中,所述线性稳压器还包括负载电容,所述负载电容耦接在所述线性稳压器的输出节点和第一恒定参考电位之间,其中所述补偿调整电路包括第二晶体管,其中所述第二晶体管的控制端耦接所述第一晶体管的控制端,使得所述第二晶体管和所述
第一晶体管处于电流镜配置。
10.在一些实施例中,其中所述传输晶体管的跨导和所述负载电容的电容的组合在所述线性稳压器的开环传递函数中产生极点,其中所述极点的频率位置随着从所述线性稳压器的输出节点汲取的负载电流的大小而变化,其中所述补偿电路被设计成在所述开环传递函数中产生补偿零点,其中所述补偿调整电路被设计成通过调整所述参数使所述补偿零点跟踪所述极点的频率位置。
11.在一些实施例中,其中所述第一驱动级还包括:第一电流源,耦接在第二恒定参考电位和所述第一晶体管的第一电流端之间;和第一电阻,耦接在所述第一晶体管的第二电流端和所述第二恒定参考电位之间。
12.在一些实施例中,其中所述补偿调整电路还包括:第二电流源,耦接在所述第二恒定参考电位和所述第二晶体管的第一电流端之间;第二电阻,耦接在所述第二晶体管的第二电流端和所述第二恒定参考电位之间;和下拉网络,耦接在所述第二晶体管的第一电流端和所述第二恒定参考电位之间,其中,所述下拉网络的电压用于调整所述补偿电路的参数。
13.在一些实施例中,其中,所述下拉网络包括串联耦接的第三二极管接法晶体管、第四二极管接法晶体管和第三电阻。
14.在一些实施例中,所述补偿电路是电阻-电容rc电路,所述电阻与所述电容串联,其中,所述补偿电路的参数是所述rc电路的电阻。
15.在一些实施例中,其中所述rc电路包括:串联耦接的第四电阻、第五电阻和第二电容;和与所述第四电阻并联耦接的第五晶体管,其中所述第五晶体管的第一电流端耦接所述第四电阻的第一端,所述第五晶体管的第二电流端耦接所述第四电阻的第二端,并且其中所述第二晶体管的第一电流端耦接所述第五晶体管的控制端。
16.在一些实施例中,所述线性稳压器还包括:第六二极管接法晶体管,其具有耦接所述第一晶体管的第一电流端的第一电流端,并且具有耦接所述电压稳压器的输出节点的第二电流端;和缓冲器,其配置有单位电压增益,其中所述缓冲器的输入端耦接所述第一晶体管的第一电流端,所述缓冲器的输出耦接所述传输晶体管的控制端。
17.在一些实施例中,所述传输晶体管是n沟道金属氧化物半导体场效应晶体管nmosfet,并且所述线性稳压器是低压差ldo稳压器。
18.本技术部分实施例还提供一种线性稳压器的频率补偿方法,所述方法包括:感测流经第一驱动级的第一晶体管的电流,所述第一驱动级耦接在所述线性稳压器的误差放大器和传输晶体管之间,其中所述第一晶体管由所述误差放大器的输出驱动;和基于所述电流的大小调整所述线性稳压器的补偿电路的参数。
19.在一些实施例中,所述补偿电路设计成:在所述线性稳压器的开环传递函数中引入零点,其中所述调整为调整所述零点的频率位置。
20.在一些实施例中,所述线性稳压器包括负载电容,其中所述负载电容的电容和所述传输晶体管的跨导的组合在所述线性稳压器的开环传递函数中产生极点,其中所述极点的频率位置随着从所述线性稳压器的输出节点汲取的负载电流的大小而变化,其中,所述调整为调整所述参数以使所述零点跟踪所述极点。
21.在一些实施例中,所述参数是电阻-电容rc电路的电阻。
22.本技术部分实施例还提供一种系统,包括:耦接到电源的电力端;以及电源单元,其被耦接以从所述电力端接收电力,所述电源单元包括第一线性稳压器,所述第一线性稳压器被耦接以接收所述电力并产生第一较低电源电压;其中,所述第一线性稳压器设计为上述任意线性稳压器。
23.在一些实施例中,所述系统还包括:天线;耦接到所述天线的第一双工器;以及第一收发器,其中所述第一较低电源电压用于为所述第一收发器中的噪声敏感块供电,所述第一收发器包括发射器部和接收器部,所述发射器部和所述接收器部各自耦接到所述第一双工器,所述第一收发器经由所述第一双工器和所述天线向无线介质发送通信信号,所述第一收发器还经由所述第一双工器和所述天线从所述无线介质接收通信信号。
24.在一些实施例中,所述系统是基站收发台bts系统,所述bts系统还包括:耦接到所述天线的组合器;多个双工器,所述多个双工器的每一个都耦接到所述组合器,所述多个双工器包括所述第一双工器;以及多个收发器,包括所述第一收发器,所述多个收发器中的每一个包括发射器部和接收器部,在一端耦接到所述多个双工器中相应的一个,在另一端耦接到基站控制器,其中所述多个收发器中的每一个用于经由所述多个双工器、所述组合器和所述天线中相应的一个将从所述基站控制器接收的信息信号发送到所述无线介质中,以及经由所述多个双工器、所述组合器和所述天线中相应的一个将从所述无线介质接收的信息信号转发到所述基站控制器。其中所述电源单元包括:多个dc-dc转换器,其被耦接以从所述电力端接收电力并生成相应的电源电压,所述多个dc-dc转换器包括第一dc-dc转换器以生成第一电源电压,其中所述第一电源电压用于为所述第一收发器中的噪声不敏感的块供电,其中所述第一线性稳压器被耦接以接收第一电源电压转换器以生成所述第一较低电源电压;以及多个线性稳压器,其被耦接以从所述dc-dc转换器中相应的一个接收电源电压并产生相应的较低电源电压,其中所述多个线性稳压器包括所述第一线性稳压器。其中由一个或多个所述dc-dc转换器产生的电源电压用于为所述多个收发器中相对噪声不敏感的块供电,并且其中由一个或多个所述线性稳压器产生的电源电压用于为所述多个收发器中噪声敏感的块供电,以及其中所述多个线性稳压器中的至少第二线性稳压器的实现方式与所述第一线性稳压器类似。
25.在一些实施例中,所述第一线性稳压器还包括负载电容,所述负载电容耦接在所述线性稳压器的输出节点和第一恒定参考电位之间,其中所述补偿调整电路包括第二晶体管,其中所述第二晶体管的控制端耦接所述第一晶体管的控制端,使得所述第二晶体管和所述第一晶体管处于电流镜配置。
26.在一些实施例中,所述传输晶体管的跨导和所述负载电容的电容的组合在所述线性稳压器的开环传递函数中产生极点,其中所述极点的频率位置随着从所述线性稳压器的输出节点汲取的负载电流的大小而变化,其中所述补偿电路被设计成在所述开环传递函数中产生补偿零点,其中所述补偿调整电路被设计成通过调整所述参数使所述补偿零点跟踪所述极点的频率位置。
27.在一些实施例中,其中所述补偿调整电路还包括:第二电流源,耦接在所述第二恒定参考电位和所述第二晶体管的第一电流端之间;第二电阻,耦接在所述第二晶体管的第二电流端和所述第二恒定参考电位之间;和下拉网络,耦接在所述第二晶体管的第一电流端和所述第二恒定参考电位之间。其中,所述下拉网络的电压用于调整所述补偿电路的参
数。其中,所述下拉网络包括串联耦接的第三二极管接法晶体管、第四二极管接法晶体管和第三电阻,其中所述补偿电路是rc(电阻-电容)电路,电阻与所述电容串联,其中所述补偿电路的参数是所述rc电路的电阻。所述线性稳压器还包括:第五二极管接法晶体管,其具有耦接所述第一晶体管的第一电流端的第一电流端,并且具有耦接所述稳压器的输出节点的第二电流端;和缓冲器,其配置有单位电压增益,其中所述缓冲器的输入端耦接所述第一晶体管的第一电流端,其中所述缓冲器的输出耦接所述传输晶体管的控制端。
附图说明
28.本技术的示例实施例将参考以下简要描述的附图来进行描述。
29.图1是线性稳压器的一般拓扑结构框图。
30.图2是本技术实施例中的线性稳压器的框图。
31.图3示出在本技术实施例中提供频率补偿的方式的流程图。
32.图4是根据本技术的若干方面的可以结合线性稳压器实现的示例系统的框图。
33.在附图中,相似的附图标记通常表示相同、功能相似和/或结构相似的元件。元件首次出现的图由相应附图标记中最左边的数字表示。
具体实施方式
34.1.概述
35.根据本技术的方面实现的线性稳压器包括耦接在误差放大器和稳压器的传输晶体管之间的第一驱动级。第一驱动级的第一晶体管具有连接以从误差放大器接收误差信号的栅极。传输晶体管的栅极被耦接以接收第一驱动级的输出。线性稳压器包括用于频率补偿的补偿电路、以及补偿调整电路。稳压器中的补偿调整电路感测通过第一驱动级的第一晶体管的电流的大小,并基于感测到的电流的大小调整补偿电路的参数。
36.感测第一驱动级处的电流指示从稳压器汲取的负载电流,并且用于控制由补偿电路引入的补偿零点的位置。补偿零点跟踪负载极点的频率位置,负载极点频率位置由稳压器输出节点处的电容和从输出节点汲取的电流组合产生。
37.下面参考示例来描述本技术的几个方面以进行说明。然而,相关领域的技术人员将认识到,本技术可以在没有一个或多个具体细节的情况下或者利用其他方法、组件、材料等来实施。在其他情况下,未详细示出公知的结构、材料或操作,以避免模糊本技术的特征。此外,所描述的特征/方面可以以各种组合来实践,尽管为了简明起见,这里仅描述了一些组合。
38.2.示例设备
39.图1描述了线性稳压器的一般拓扑结构。如图所示,线性稳压器100包括误差放大器110、传输晶体管(传输元件)150、包括电阻170-1和电阻170-2的分压网络。此外,还示出了负载电容160-2和负载(电流)160-1。传输晶体管150是n型mosfet(金属氧化物半导体场效应晶体管或简称nmos),尽管通常也采用p型晶体管。nmos 150在漏极(d)从电源(未示出)接收输入电压(input voltage,简称vin)107。nmos 150的源极(s)是稳压器的输出端,在该输出端上提供调节后的输出电压(output voltage,简称vout)。nmos 150的导通电阻由误差放大器110经由路径115施加在栅极(g)上的电压控制,并且是可调的,使得尽管负载电流
160-1和/或vin发生变化,vout156仍维持在期望的水平。
40.由电阻170-1和电阻170-2形成的分压网络对输出电压vout进行采样,并将vout的一部分作为反馈电压vfb(feedback voltage,简称vfb)171提供给误差放大器110的正极端(+)。
41.误差放大器在负极端(-)接收参考电压(reference voltage,简称vref)105(其可以以已知的方式在稳压器100内部产生)。误差放大器在路径115上产生vref和vfb之间差值的放大版本,以调节nmos 150的栅极电压。负载电流160-1的变化引起vout的大小的变化,如相关领域中众所周知的,这些变化通过由分压器和误差放大器形成的反馈回路被快速校正。
42.如相关领域所公知的,频率补偿通常用于反馈系统。与其他反馈系统一样,在诸如稳压器100之类的线性稳压器中,采用频率补偿来防止正反馈的意外出现,正反馈又可能导致输出电压vout以任意方式从其应该维持的恒定水平振荡或改变。除了防止正反馈之外,采用频率补偿还可以用于最小化或防止vout响应干扰(例如负载电流和/或vin的阶跃变化)中的过冲和振铃。
43.可以通过修改稳压器开环传递函数的增益和/或相位特性来实现频率补偿。简而言之,在稳压器的开环传递函数中确保足够的增益和/或相位裕度,以防止正反馈发生,并最小化vout响应阶跃干扰的振铃。开环传递函数指的是反馈信号和误差信号的比率,即,它是电路的传递函数的乘积,这些电路形成从误差放大器的输出(图1中的151)到接收反馈信号vfb(图1中的171)的误差放大器的输入的路径。
44.对于稳压器(诸如线性稳压器100),传递函数可以具有两个低频极点,以及一个或多个高频(非主导)极点。例如,由于节点115和节点vout处的电抗(电容)元件,可能存在低频极点。特别地,负载电容160-2的电容(与传输晶体管250的跨导相结合)可以引入低频极点(负载极点)。此外,由于负载电容引起的极点位置(就频率而言)随着负载电流160-1的大小而偏移。当iload(负载电流160-1)为零时,极点(负载极点)处于低频。但是随着iload的增加,负载极点移动到更高的频率。因此,补偿零点(通常使用串联的电阻和电容来消除极点或最小化极点的影响)也需要随着负载极点的频率变化跟踪负载极点,即,补偿零点的位置也需要随着负载极点的移动(更高或更低)而在频率上沿相同的方向移动(更高或更低)。典型地,负载电流iload被感测,并且其大小被用来偏移补偿零点。引入补偿零点,使其频率位置跟踪负载极点频率。
45.现有技术通过使用连接到传输晶体管150的电流镜,以镜像通过传输晶体管的电流来感测负载电流。然而,这种方法有一些缺点。例如,使用这种现有方法可能很难获得iload的准确(例如,几毫安培的量级)的测量值。此外,由于任何负载电流(iload)变化都需要反映在传输晶体管的电流上,因此这种感测可能固有地与感测中的延迟相关联。这种延迟的一些原因是误差放大器110的一个或多个节点、传输晶体管150的栅极电容等的固有延迟。这种延迟可能转化为反馈回路中至少暂时的不稳定性,并导致至少暂时的在vout大小上的不可接受的变化或振荡水平。
46.本技术的各个方面涉及线性稳压器中的负载电流感测,以用于频率补偿,并且至少克服了上述缺点。
47.3.间接负载电流感测
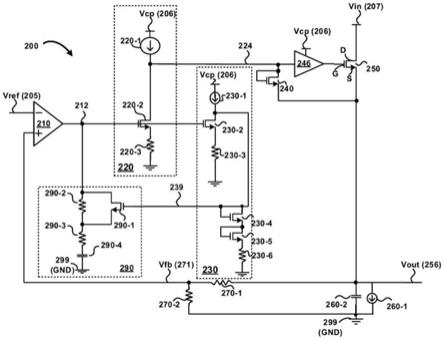
48.图2是在一个实施例中根据本技术的各个方面实现的线性稳压器的示意图。线性稳压器200可以实现为低压差(low-dropout,简称ldo)稳压器,如图所示,包括误差放大器210、驱动级220、钳位240、缓冲器246、传输晶体管250、由电阻270-1和电阻270-2形成的分压器、补偿调整电路230和补偿电路290。端299代表接地(gnd)端。电容260-2是负载电容,260-1代表从vout 256汲取的负载电流。这里要注意的是,图2的具体细节仅以说明的方式提供,并且根据本技术的各个方面提供的线性稳压器可以包括更多或更少的元件/块,这对于基于本技术内容的相关领域的技术人员来说是显而易见的。
49.稳压器200的基本操作类似于上面参照图1描述的操作,其中误差放大器210、传输晶体管250、负载260-2/260-1、由电阻270-1和270-2形成的分压器分别类似于图1的误差放大器110、传输晶体管150、负载160-2/160-1、由电阻170-1和170-2形成的分压器进行操作,并且从vin(207)在输出节点256上产生调节后的输出电压vout。误差放大器210接收参考电压vref(205),其可以以已知的方式在内部产生。晶体管250是nmos晶体管,在图2中,漏极、栅极和源极分别用字母d、g和s进行标记。vin(207)表示来自电源(未示出)的输入电压。
50.电容260-2和负载电流360-1的组合一起表示连接到vout 256的负载,并且该组合在稳压器200的开环传递函数中(由于电容260-2和传输晶体管250的跨导)产生极点(负载极点)。并且,由于传输晶体管250的跨导相应地随着iload而变化,因此负载极点的位置(频率)根据iload(260-1)的值而变化。
51.补偿电路290设计成在稳压器200的开环传递函数中引入零点,以补偿包括负载极点的稳压器200的主导(低频)极点。稳压器200的开环传递函数具有与上述图1中的开环传递函数相同的含义。图中,补偿电路290包括电阻290-2和电阻290-3、nmos晶体管290-1和电容290-4。补偿电路290基本上是电阻(resistance,简称r)和电容(capacitance,简称c)的串联组合,即rc网络。电阻由组件290-1、290-2和290-3的组合提供,并且该组合的有效电阻可通过在晶体管(nmos)290-1的栅极端上施加适当的电压来调整。通过调整电阻,可以改变零点的位置(频率)。补偿电路290耦接在节点212和地之间。
52.根据本技术的一个方面,线性稳压器200包括驱动级220,该驱动级220包括在电源电压vcp(206)和地之间串联连接的电流源220-1、晶体管(nmos)220-2和电阻220-3。vcp 206可以由线性稳压器200内部的电荷泵(未示出)产生。可以观察到,驱动级220位于误差放大器220的输出端212和传输晶体管250的栅极之间。nmos 220-2的栅极连接节点212。驱动级220作为第二增益级(第一增益级是误差放大器210)进行操作,并且是反相级,其增加了稳压器200中正向路径的总增益。通过晶体管220-2和电阻220-3的电流等于电流源220-1产生的(恒定)电流和路径224上的电流之差。路径224上的电流是第一驱动级220的输出,并且(直接或当实施缓冲器246时经由缓冲器246)驱动传输晶体管250的栅极。此处应当注意的是,驱动级220使得如本文所述的(间接)执行负载电流感测变得容易。
53.补偿调整电路230示出为包括电流源230-1、nmos 230-2、电阻230-3、nmos 230-4和230-5以及电阻230-6。nmos 230-2的栅极也耦接到节点212,即误差放大器200的输出。电阻220-3使晶体管220-2的跨导gm退化,以便更线性地控制增益,并且需要电阻230-3来匹配电阻220-3。
54.晶体管220-2和230-2形成电流镜对。nmos 230-2的大小可以实现为使得通过nmos 230-2的电流是通过nmos 220-2的电流的某个期望部分。由电流源230-1产生的电流和通过
nmos 230-2的电流之差通过nmos230-4、230-5和电阻230-6的串联连接流到地。nmos 230-4、230-5和电阻230-6的串联连接用于调整dc偏移,以在正确的操作区域操作nmos290-1。这里要注意的是,虽然nmos 230-4和230-5可以由电阻代替,但是使用nmos晶体管将更好地跟踪过程变化。(连接到nmos 290-1的栅极的)节点239和地之间的电压决定了nmos 290-1的导通电阻。随着负载电流增加,节点239上的电压增加,从而降低nmos 290-1的导通电阻,并将零点移动到更高的频率。
55.在一个实施例中,220-1的电流值是50微安(ua),230-1的电流是10ua,电阻220-3和电阻230-3的值分别是2k(千欧姆)和10k。
56.钳位晶体管240镜像输出级电流,因为钳位晶体管240具有与传输晶体管250相同的vgs。因此,通过晶体管220-2的电流是电流220-1减去负载电流(按比例)。在操作中,iload(260-1)的变化反映为节点212处的电压变化。由于212的电压被施加到晶体管220-2的栅极,流过220-2的电流发生相应的变化。相应地,通过流过nmos 230-2的电流改变,节点239上的电压相应地改变,因为通过组件230-4、23-5和230-6的电流等于电流230-1和流过nmos 230-2的电流之差。因此,节点239上的电压变化导致nmos 220-2中的电流变化,这表征iload的变化,并且改变nmos290-1的导通电阻,从而改变补偿零点电路290的有效电阻,从而以基于iload的变化的方式改变零点的位置。例如,如果iload增加,vfb就会减少。误差放大器210因此会降低节点212上的电压。这又减少了通过nmos220-2和nmos 230-2的电流。因此,节点239处的电压将增加,从而降低nmos 290-1的导通电阻。因此,rc零点电路290的有效电阻将降低,从而将零点位置移动到更高的频率。在iload减小的情况下,会发生相反的情况,并且补偿调整电路会增加nmos 290-1的导通电阻,电路290的有效电阻会增加,零点会移动到较低的频率。因此,补偿电路产生的补偿零点跟踪负载极点的移动,并随着负载极点的频率移动对其进行补偿。
57.由于nmos 250的大栅-源电容,相比通过传输晶体管250的电流,212的电压能更快地响应负载电流(iload)260-1的变化。此外,从图2可以观察到,如下所述,由于驱动级220以及钳位240和缓冲器246的存在,误差放大器210的输出(212)与nmos 250的栅-源电容隔开。因此,可以理解,通过nmos 220-2以及因此通过nmos 230-2的电流也比通过传输晶体管250的电流更快地响应负载电流(iload)260-1的变化。由于负载电流的“感测”是通过镜像晶体管220-2的电流来执行的,因此可以理解的是,避免了如果直接感测通过传输晶体管250的电流(例如,通过镜像通过传输晶体管250的电流)会出现的任何延迟。因此,驱动级220可以用于感测负载电流,以用于补偿。因此,响应于iload的变化和负载极点的移动,可以实现快速、准确地感测负载电流,从而实现补偿零点移动。
58.钳位240和缓冲器246的使用可以进一步提高基于补偿调整电路230的iload感测的精度,并且还为线性稳压器200提供其他益处,如下文所述。
59.缓冲器246被实现为单位电压增益缓冲器(这意味着施加到nmos250的栅极的电压与路径224上的电压大小大相同),并且可以向nmos250的栅极提供高电流输出,以快速地对nmos 250的寄生栅极-源极电容或寄生栅极-地电容进行充电或放电,这两者都可能相对较大,从而允许通过传输晶体管250的电流更快速地响应iload的变化。然而,即使缓冲器246存在并且可操作,对随着通过传输晶体管250的电流而iload变化的响应仍然可能是慢的,尽管比没有缓冲器246的情况要快。缓冲器246操作以将误差放大器和节点224的输出与上
述大寄生栅极电容隔开。缓冲器246由电压vcp(206)供电,并作为第二缓冲级进行操作。
60.钳位240由nmos电路240构成,其栅极和漏极端连接到节点224,并作为节点224和256(vout)之间的二极管接法晶体管进行操作。由于nmos 240和传输晶体管250的栅极处于相同电位,并且由于nmos 240和传输晶体管250的源极也处于相同电位(因为它们相连接),nmos 240镜像通过传输晶体管250的电流。然而,由于钳位240与nmos 250的栅源电容隔离,所以相比传输晶体管250,通过钳位240的电流能更快地响应负载电流(iload)260-1的变化。
61.由于通过nmos 220-2的电流是电流220-1和在路径224上(流经钳位240并进入输出节点256)的电流之间的差,所以通过nmos 220-2的电流可以更准确地表征iload的变化。一般来说,通过nmos 220-2或230-2的电流是负载电流(的电流值)的快速获得且足够好的表示,并且可由补偿电路290使用。超过某个负载电流,负载极点(在频率上)被充分推出,不再需要对零点位置进行跟踪。因此,可以限制电流感测范围,以节省静态功耗。
62.这里要注意的是,在本技术的一些实施例中,线性稳压器200可以在没有钳位240和缓冲器246的情况下实现。在这样的实施例中,节点224直接连接传输晶体管250的栅极。
63.上文描述的实现跟踪补偿零点的操作可以总结为图3的流程图,下面进行简要说明。
64.图3的流程图从步骤301开始,其中控制立即转到步骤310。
65.在步骤310中,补偿调整电路感测流经稳压器200中第一驱动级的第一晶体管的电流。由此感测的电流表示负载电流iload。第一驱动级连接在线性稳压器的误差放大器的输出和传输晶体管之间。控制然后转到步骤320。
66.在步骤320中,补偿调整电路基于感测到的电流的大小来调整线性稳压器的补偿电路的参数。控制然后返回步骤310,并且可以重复这些步骤。
67.如上所述实现的线性稳压器200可以结合用在如下通过示例简要描述的更大的设备或系统中。
68.4.系统
69.图4是示出本技术实施例中的系统的实现细节的框图,该系统结合了上文详细描述的线性稳压器200。图4的系统可以部署在蜂窝电话系统的基站收发台(base transceiver station,简称bts)(lte-长期演进中的enodeb)中,并且在本文被称为bts系统400。概括地说,bts系统400促进用户设备(user equipment,简称ue)之间的无线通信,ue可以是移动站(例如手机)或固定用户设备(例如具有互联网连接的计算机)。bts系统400可以按照诸如全球移动通信系统(global system for mobile communications,简称gsm)、码分多址(code division multiple access,简称cdma)、第三代移动通信技术(3rd generation,简称3g)、第四代移动通信技术(4th generation,简称4g)、长期演进、第五代移动通信技术(5th generation,简称5g)等技术和标准来实现。bts系统400示出为包括收发器410a至410n、双工器420a至420n、组合器430、天线440、电池组450和电源460。bts系统400的特定组件/块仅以说明的方式示出。然而,如相关领域中众所周知的,通常bts系统400可以包括更多的组件/块,例如温度传感器、维护和配置块等。
70.操作收发器410a至410n中的每一个,以经由对应的双工器420a-420n、组合器430和天线440向无线用户设备发送和/或从无线用户设备接收通信信号。每个收发器包括发射
器部和接收器部。因此,收发器410a示出为包括发射器部和接收器部,该发射器部包括发射基带块411、发射射频(radio frequency,简称rf)块412和功率放大器413,该接收器部包括低噪声放大器(low-noise amplifier,简称lna)416、接收rf块415和接收基带块414。
71.发射基带块411经由总线499中所示的相应路径从基站控制器(base station controller,简称bsc)接收信息信号(例如,表示语音、数据)(其反过来从bsc下游网络中的另一用户设备(无线或固定)接收通信信号),根据相应的技术和协议处理信号以执行调制、信道编码和其他操作,并将处理后的信号转发到发射rf块412。发射rf块412可以执行诸如上转换到rf的操作,并将rf信号转发到功率放大器413。功率放大器413放大接收到的rf信号,并通过双工器420a、组合器430和天线440将功率放大的信号发送到相应的无线用户设备。
72.lna 416经由双工器420a、组合器430和天线440从无线用户设备接收rf信号,放大rf信号,并将放大的rf信号转发到接收rf块415。接收rf块415将rf信号下转换到基带频率,并将基带信号转发到接收基带块414。接收基带块414可以对基带信号执行诸如解调、纠错等操作以获得信息信号(例如,数据、语音),并经由总线499中的相应路径将信息信号转发到给bsc。
73.时钟417生成启用收发器410中数字单元的操作所需的一个或多个时钟。例如,发射基带块411和接收基带块414可以内部包括一个或多个处理器,该处理器需要时钟来启用其操作。
74.图4的其它收发器的发射器、接收器和时钟的操作与上面关于收发器410a的描述类似,并且包括相应的发射器块和接收器块。
75.双工器420a至420n中的每一个都能够在相应的双工器和组合器430之间的单个路径上发送和接收相应的发送和接收信号(即,双向(双工)通信)。双工器420a至420n中的每一个都可以用并联连接的两个带通滤波器来实现,其中一个滤波器提供相应的发射器和组合器430之间的路径,另一个滤波器提供组合器430和相应的接收器之间的路径。
76.组合器430组合来自/去往收发器410a至410n的信号,以使得能够使用单个天线440发送和接收所有信号。
77.操作天线440以在收发器和无线用户设备之间从无线介质接收承载信息的无线信号,并向无线介质发送收承载信息的无线信号。
78.电池组450容纳电池,为bts系统400中的块/单元的操作提供电力。
79.电源460在电源460的电力端上从电池组450接收电力(例如电压为12伏),并且包括多个dc-dc转换器461a至461m,以及多个线性稳压器(例如实现为ldo)462a至462l。dc-dc转换器461a-461m产生各种电压(每个dc-dc转换器产生相应的电压,例如0.7v、1.2v、2.0v、3.6v等。)用于为上述bts系统400的一个或多个块/组件供电。具体地,由dc-dc转换器产生的电压可用于为收发器410a至410n中对噪声不太敏感的块和组件(例如发送和接收基带块)供电。因此,电源电压491c由dc-dc转换器461a产生,并被提供给收发器410的(发射和接收基带块)。为了清楚和简明起见,图4中仅示出了一个直接来自dc-dc转换器的电源连接。然而,还会有更多这样的电源连接。
80.ldo 462a-462l中的每一个被连接以接收对应的dc-dc转换器461a-461m的输出电压,并且根据收发器的一些组件/块的需要产生对应的较低电压。ldo产生的电压用于为收
发器410a至410n中的噪声敏感块和组件供电,例如收发器中包括的发射rf块(如412)、接收rf块(如415)、lna(如416)和时钟(如417)。为了清楚和简明起见,图4中仅示出了两个电源连接491a和491b(分别来自ldo 462a和ldo 462l)。然而,从ldo到收发器中相应块的电源连接会更多。与dc-dc转换器相比,ldo可以具有更好的负载和线路调节,因此可以提供更干净的电源电压,同时噪声更低,正如上述噪声敏感块所要求的那样。
81.ldo 462a-462-l中的一个或多个被实施为以上详细描述的线性稳压器200。
82.此处要注意的是,线性稳压器200也可以用在其他系统中,例如单独的发射器和接收器、移动电话等。
83.5.结论
84.在整个说明书中,对“一个实施例(“one embodiment”和“an embodiment”)”或类似语言的引用意味着结合该实施例描述的特定特征、结构或特性包括在本技术的至少一个实施例中。因此,在整个说明书中出现的短语“在一个实施例中(“in one embodiment”和“in an embodiment”)”和类似的语言可以但不一定都指代相同的实施例。
85.虽然在图1、2和4的图示中,端/节点示出为具有到(即,“连接到”)各种其他端的直接连接,但是应当理解,附加组件(适合于特定环境)也可以存在于路径中,并且因此连接可以被视为“电耦接”到相同的连接端。
86.应当理解,上面提到的特定类型的晶体管(例如nmos、pmos等)仅作为说明。然而,对于相关领域的技术人员来说,通过阅读本文提供的公开内容,使用不同配置和晶体管的替代实施例将是显而易见的。例如,nmos晶体管可以用pmos(p型金属氧化物半导体)晶体管代替,同时还可以互换到电源和接地端的连接。
87.因此,在本技术中,电源端和接地端被称为恒定参考电位,晶体管的源极(发射极)和漏极(集电极)(接通时提供电流路径,断开时提供开路路径)被称为电流端,栅极(基极)被称为控制端。
88.虽然上文已经描述了本技术的各种实施例,但是应当理解,它们仅作为示例而非限制来呈现。因此,本技术的广度和范围不应受任何上述实施例的限制,而应仅根据所附权利要求及其等同物来定义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1