一种基于弹性变形的区域网格动态重构方法与流程
[0001]
本发明涉及动网格技术领域,特别涉及一种基于弹性变形的区域网格动态重构方法。
背景技术:
[0002]
网格技术主要解决计算仿真过程中物体表面变形或多个物体/部件之间存在相对运动的网格更新问题,在航空航天、船舶、机械、化工等领域具有广泛的应用需求。目前,动网格技术主要包括重叠网格法、网格重构法以及浸入边界法和网格变形方法等,但都存在一定的局限性,如重叠网格法和网格重构法计算量大、计算效率低;浸入边界法仅适用于低雷诺数问题;网格变形方法无法保证变形后的网格质量等。本发明公开的区域网格动态重构方法,网格点位置更新全部通过代数计算完成,计算量小、计算效率高;重构前后网格质量保持较好、网格节点数量保持不变;可实现网格的高效、高质量动态重构。
技术实现要素:
[0003]
针对现有技术中存在的问题,提供了一种基于弹性变形的区域网格动态重构方法。
[0004]
本发明采用的技术方案如下:一种基于弹性形变的区域网格动态重构方法,包括以下步骤:
[0005]
步骤1、计算变形前内边界到外边界之间的距离;
[0006]
步骤2、计算变形前空间网格点到物面的距离;
[0007]
步骤3、计算空间网格点的分布情况;
[0008]
步骤4、物面网格点更新;
[0009]
步骤5、基于弹性形变完成区域空间网格点动态重构。
[0010]
进一步的,所述步骤1中变形前内边界到外边界之间的距离计算方法为:内边界到外边界之间的距离即为物面上的网格点沿法向到外边界点形成的线段长度,设为s(i,j
max
,k):
[0011][0012]
其中,i表示流向、j表示法向、k表示周向,(i,j,k)共同确定一个网格点,x(i,j
max
,k)则表示该网格点在x方向的坐标值,y(i,j,k)表示该网格点在y方向的坐标值,z(i,j,k)表示该网格点在z方向的坐标值。
[0013]
进一步的,所述步骤2中计算变形前空间网格点到物面的距离计算方法为:空间网格点到物面的距离即为物面上的网格点沿法向到任意空间网格点之间的距离,设为s(i,j,k):
[0014][0015]
进一步的,所述步骤3中空间网格点的分布情况计算方法为:ds(i,j,k)=s(i,j,k)/s(i,j
max
,k)。
[0016]
进一步的,所述步骤4中物面网格点通过外部输入舵偏的变形角度进行的更新。
[0017]
进一步的,所述步骤6中的动态重构具体方法为:在物面网格点更新之后,外边界保持不动,对内外边界构成的区域内网格点进行位置调整,基于弹性拉伸保持网格点在网格线中的相对位置不变,调整后的位置为:
[0018]
x
′
(i,j,k)=ds(i,j,k)*x(i,j
max
,k)-x
′
(i,1,k))+x
′
(i,1,k)
[0019]
y
′
(i,j,k)=ds(i,j,k)*y(i,j
max
,k)-y
′
(i,1,k))+y
′
(i,1,k)
[0020]
z
′
(i,j,k)=ds(i,j,k)*z(i,j
max
,k)-z
′
(i,1,k))+z
′
(i,1,k)。
[0021]
与现有技术相比,采用上述技术方案的有益效果为:本发明提出的重构方案只涉及代数运算,网格重构限定于具体区域,计算量小,网格更新效率高;基于弹性拉伸思想,网格点分布与初始网格成比例拉伸或缩短,确保了动态重构后的网格质量;模块化好,实现方便,可适用于机翼变形、控制舵偏转等航空航天领域的数值仿真需求。
附图说明
[0022]
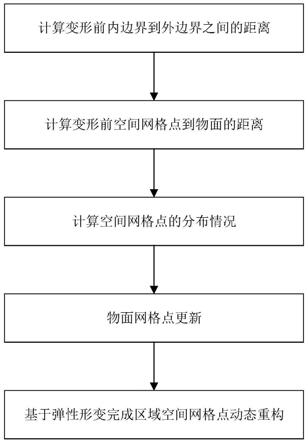
图1是本发明的重构方法流程图。
[0023]
图2是基于弹性变形的区域网格动态重构方法实现过程示意图。
[0024]
图3是本发明中的一实施例动态重构生成的一组网格对比图。
[0025]
图4是基于动态重构网格计算的不同时刻表面压力云图。
具体实施方式
[0026]
下面结合附图对本发明做进一步描述。
[0027]
本发明的目的在于为数值仿真提供一种高效、高质量的网格动态重构方法,可满足航空航天中诸如机翼气动弹性变形、控制舵面的偏转等问题的应用需求。通过区域网格的外边界保持不动;区域网格的内边界通常为翼面或舵面,其变形或运动形式由外部输入;内外边界之间的空间网格更新基于弹性变形的思路进行动态重构。
[0028]
在本方法在执行过程中,不需要人工干预,全自动实现网格的动态重构过程,但在计算之前需要做好相关的准备工作。
[0029]
首先,在生成网格时,需要确定区域的外边界,将物面变形、运动等可能波及的区域尽可能全部包含进来,形成动网格重构区域。
[0030]
其次,指定运动或变形的物面,在数值仿真中,一般以特殊边界条件的形式给出。
[0031]
最后,指定物面变形或运动方式,以控制舵偏转为例,指定舵轴和舵面偏转角随时间变化历程,本方法可自动处理此类舵偏运动问题的物面更新问题。
[0032]
具体方案如下:
[0033]
如图1、2所示,一种基于弹性形变的区域网格动态重构方法,包括以下步骤:
[0034]
步骤1、计算变形前内边界到外边界之间的距离;
[0035]
步骤2、计算变形前空间网格点到物面的距离;
[0036]
步骤3、计算空间网格点的分布情况;
[0037]
步骤4、物面网格点更新;
[0038]
步骤5、基于弹性形变完成区域空间网格点动态重构。
[0039]
具体的,所述步骤1中变形前内边界到外边界之间的距离计算方法为:内边界到外边界之间的距离即为物面上的网格点沿法向到外边界点形成的线段长度,设为s(i,j
max
,k):
[0040][0041]
其中,i表示流向、j表示法向、k表示周向,(i,j,k)共同确定一个网格点,x(i,j
max
,k)则表示该网格点在x方向的坐标值,y(i,j,k)表示该网格点在y方向的坐标值,z(i,j,k)表示该网格点在z方向的坐标值。
[0042]
步骤2中计算变形前空间网格点到物面的距离计算方法为:空间网格点到物面的距离即为物面上的网格点沿法向到任意空间网格点之间的距离,设为s(i,j,k):
[0043][0044]
步骤3中空间网格点的分布情况计算方法为:ds(i,j,k)=s(i,j,k)/s(i,j
max
,k)。
[0045]
步骤4中物面网格点通过外部输入参数进行的更新,即通过仿真软件调整舵偏的变形角度输入实现物面网格点的更新。
[0046]
步骤6中的动态重构具体方法为:在物面网格点更新之后,外边界保持不动,对内外边界构成的区域内网格点进行位置调整,基于弹性拉伸保持网格点在网格线中的相对位置不变,调整后的位置为:
[0047]
x
′
(i,j,k)=ds(i,j,k)*x(i,j
max
,k)-x
′
(i,1,k))+x
′
(i,1,k)
[0048]
y
′
(i,j,k)=ds(i,j,k)*y(i,j
max
,k)-y
′
(i,1,k))+y
′
(i,1,k)
[0049]
z
′
(i,j,k)=ds(i,j,k)*z(i,j
max
,k)-z
′
(i,1,k))+z
′
(i,1,k)。
[0050]
本发明提出的重构方案只涉及代数运算,网格重构限定于具体区域,计算量小,网格更新效率高;基于弹性拉伸思想,网格点分布与初始网格成比例拉伸或缩短,确保了动态重构后的网格质量;模块化好,实现方便,可适用于机翼变形、控制舵偏转等航空航天领域的数值仿真需求。
[0051]
如图3所示,采用本发明提出的动态重构方法生成的一组网格对比图,在该实施例中,控制舵面以正弦函数的形式运动,模拟该运动过程需要根据舵面的运动位置实时更新网格。图3中初始网格由人工生成,重构网格1、重构网格2和重构网格3为不同舵偏位置的网格,由动态重构技术自动生成。
[0052]
图4是通过求解navier-stocks方程得到的表面压力云图,舵面的运动过程、位置和网格与图3完全一致,验证了本项发明的实用性。
[0053]
本发明并不局限于前述的具体实施方式。本发明扩展到任何在本说明书中披露的新特征或任何新的组合,以及披露的任一新的方法或过程的步骤或任何新的组合。如果本领域技术人员,在不脱离本发明的精神所做的非实质性改变或改进,都应该属于本发明权利要求保护的范围。
[0054]
本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
[0055]
本说明书中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1