一种基于EOASM算法在码垛机器人驱动臂座的代理模型构建中的应用方法与流程
一种基于eoasm算法在码垛机器人驱动臂座的代理模型构建中的应用方法
技术领域
[0001]
本发明属于工程设计技术领域,尤其涉及一种基于局部误差期望加点的组合代理模型构建方法(eoasm法)在码垛机器人驱动臂座的代理模型构建中的应用方法。
背景技术:
[0002]
在机械设计和优化等工程问题中,进行大量的真实物理实验是困难的,通常采用计算机仿真替代大部分的真实物理实验。对于复杂工程问题,即使是计算机仿真实验通常也需要大量时间成本,进而导致后期的分析与优化设计工作难以进行。代理模型是对真实物理模型的一种近似建模,可以在确保模型精度的前提下,节约大量分析计算成本,极大地减少了大型工程优化问题中的工作量,进而得到了广泛的应用。代理模型的基本原理是利用插值技术或者拟合技术对复杂或者未知的函数关系或工程实例进行替代。现今常用的代理模型主要有kriging模型、人工神经网络模型、径向基函数(radial basis function,rbf)模型、支持向量回归模型、多项式响应面模型等。
[0003]
代理模型的构建基础便是样本点,若想一次获得高精度代理模型,需要一次性加入大量样本点,计算量过大。现在针对单一代理模型发展了各种加点方法,即开始采取少量样本点后期根据代理模型的精度变化特点而进行序列加点,如此可以在同等精度条件下有效减少所需样本总量。但是现有的加点策略主要是针对单一的某一种代理模型,通用性较差。如果需要针对不同种类代理模型进行加点,则加点与建模成本过高,所以本发明提出了一种通用的基于局部误差期望的加点策略。该方法首先将每个样本点的局部误差统一考虑,计算所有样本点的期望值后并在满足加点条件的样本点处加点,进而平衡全局与局部预测精度。
[0004]
另外对于一个特定的复杂工程实例问题来说,如何找到一个适合此问题的代理模型与其匹配是一个难题。为提高代理模型的适应性,一个合理的选择是使用多个单一代理模型的线性组合,即组合代理模型。和单一代理模型相比,组合代理模型直接对代理模型候选集进行加权组合,节约了大量浪费在筛选代理模型上的时间。黄焕军等人发现,组合代理模型不仅比单一代理模型的预测精度高,而且还能促进搜索优化问题的最优解;晏良等人提出一种新的权函数构造方法,该方法与最优子模型的精度相当,同时能提高对真实响应分布的逼近;吕志明等提出一种基于多代理模型的优化方法,结果显示比单一代理模型的寻优效果更好;l.h.ouyang等人运用方差分析方法确定组合代理模型中单一代理模型权重的选择,并通过一个微钻过程说明了该技术的有效性,比较结果表明,此方法不仅能提高模型的预测性能,而且能生成可靠的质量设计方案。但是在现有的代理模型研究中,很少有学者将组合代理模型与序列采样有机结合起来。本发明在基于本发明提出的局部误差期望加点序列采样方法的基础上,进一步提出了一种自适应组合代理模型构建方法(ensemble of adaptive surrogate model,简称为eoasm)。
[0005]
随着工业自动化的发展,码垛机器人因其高生产效率、节省人力物力而使用广泛,
但是由于高强度的运作,码垛机器人的大臂与其驱动臂座装配处经常产生较大的应力,长时间容易产生疲劳损伤,使零部件的故障率提高,工作的可靠性降低。由于应力的非线性程度较强,难以用显式函数表达,目前常用的方法便是依靠大规模的计算机仿真实验,但是其十分耗费人力物力。本发明将本发明提出的基于局部误差期望加点的自适应组合代理模型应用到码垛机器人驱动臂座的应力计算中,可以在减少人力物力消耗的条件下获得较高精度的最大应力模型。
[0006]
本发明首次提出基于局部误差期望加点的采样策略,有机融合了自适应加点与组合代理模型构建,流程方便简洁,在保证一定精度前提下所添加的样本总数得到有效控制,具有更广泛的应用前景。
技术实现要素:
[0007]
本发明的发明目的是:为了解决传统代理模型加点策略的不统一性,预测精度的稳健性较低,本发明提出了一种基于局部误差期望加点的组合代理模型构建方法在码垛机器人驱动臂座的代理模型构建中的应用方法。
[0008]
本发明的技术方案是:一种基于局部误差期望加点的组合代理模型构建方法在码垛机器人驱动臂座的代理模型构建中的应用方法,其特征在于,包括以下步骤:
[0009]
a、建立码垛机器人驱动臂座的几何模型;
[0010]
b、对码垛机器人驱动臂座的几何模型进行材料配置;
[0011]
c、利用试验设计技术产生初始样本,选择码垛机器人驱动臂座的最大应力为性能函数,并调用静力学仿真模型获取初始样本对于性能函数的真实响应值;
[0012]
d、根据c中的样本信息及其响应值构建初始的kriging和rbf代理模型;
[0013]
e、通过eoasm算法构建满足精度要求的最终组合代理模型;
[0014]
所述步骤a建立码垛机器人驱动臂座的几何模型为通过ansys依据相关参数建立的几何模型。
[0015]
所述步骤b对码垛机器人驱动臂座的几何模型进行材料配置,具体为:
[0016]
b1、定义码垛机器人驱动臂座的材料属性,确定设计变量。驱动臂座的材料采用qt500-7,密度为7
×
103kg/m3,弹性模量为1.62
×
10
11
pa,泊松比为0.28,屈服强度为3.2
×
108pa,张力强度为5
×
108pa,抗剪模量为6.27
×
10
10
pa,所确定的设计变量有4个分别为x1、x2、x3、x4。
[0017]
b2、执行网格无关性检验并选择适合的方案。
[0018]
所述步骤c利用试验设计技术产生初始样本,选择码垛机器人驱动臂座的最大应力为性能函数,并调用静力学仿真模型获取初始样本对于性能函数的真实响应值,具体为:
[0019]
c1、利用拉丁超立方试验生成初始样本点,选择码垛机器人驱动臂座的最大应力为性能函数;
[0020]
c2、调用静力学仿真模型获取初始样本点处针对性能函数的真实响应值;
[0021]
进一步地,所述步骤d根据c中的样本信息及其响应值构建初始的kriging和rbf代理模型;
[0022]
所述步骤e通过d中建立的初始代理模型构建最终的组合代理模型,利用基于局部误差期望加点的序列迭代准则建立精度更高的单一代理模型,最后通过组合代理模型构建
方法构建最终的组合代理模型,具体包括以下分步骤:
[0023]
e1、根据步骤a、b、c和d得到码垛机器人驱动臂座的几何模型,包括设计变量的个数以及其取值范围;
[0024]
e2、利用初始样本分别获取kriging和rbf代理模型每个点的局部误差,以及每个单一代理模型对于性能函数的局部误差均值;
[0025]
e3、通过局部误差期望加点准则进行迭代求解,增加新的样本点,并获取其响应值;
[0026]
e4、基于e3中已更新的样本集,重新建立kriging和rbf代理模型;
[0027]
e5、检查收敛准则,如果满足,得到最终单一代理模型,构建最终码垛机器人驱动臂座的最大应力的组合代理模型,否则返回e2继续迭代加点。
[0028]
本发明的有益效果是:本发明首次提出基于局部误差期望加点的采样策略,有机融合了自适应加点与组合代理模型构建,流程方便简洁,在保证一定精度前提下所添加的样本总数得到有效控制,在实际工程应用中,尤其是复杂工程优化问题或者黑箱问题,具有更广泛的应用前景。
附图说明
[0029]
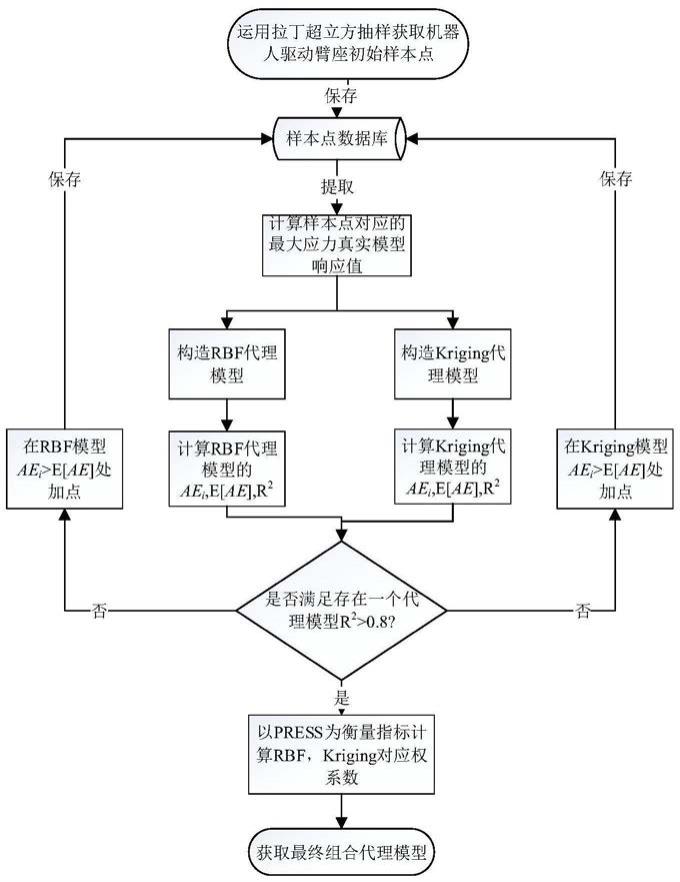
图1是本发明的一种基于局部误差期望加点的组合代理模型构建方法在码垛机器人驱动臂座的代理模型构建中的应用方法流程示意图。
[0030]
图2是本发明中码垛机器人驱动臂座的外形结构示意图。
具体实施方式
[0031]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0032]
如图1所示,为本发明的一种基于eoasm算法在码垛机器人驱动臂座的代理模型构建中的应用方法流程示意图。一种基于局部误差期望加点的组合代理模型构建方法在码垛机器人驱动臂座的代理模型构建中的应用方法,包括以下步骤:
[0033]
a、建立码垛机器人驱动臂座的几何模型;
[0034]
b、对码垛机器人驱动臂座的几何模型进行材料配置;
[0035]
c、利用试验设计技术产生初始样本,选择码垛机器人驱动臂座的最大应力为性能函数,并调用静力学仿真模型获取初始样本对于性能函数的真实响应值;
[0036]
d、根据c中的样本信息及其响应值构建初始的kriging和rbf代理模型;
[0037]
e、通过本发明提出的eoasm算法构建满足精度要求的最终的码垛机器人驱动臂座的最大应力的组合代理模型;
[0038]
在步骤a中,本发明以码垛机器人驱动臂座设计为例。通过ansys依据相关参数建立的几何模型。
[0039]
在步骤b中,对码垛机器人驱动臂座的几何模型进行材料配置具体为:
[0040]
b1、定义码垛机器人驱动臂座的材料属性,确定设计变量。驱动臂座的材料采用qt500-7,密度为7
×
103kg/m3,弹性模量为1.62
×
10
11
pa,泊松比为0.28,屈服强度为3.2
×
108pa,张力强度为5
×
108pa,抗剪模量为6.27
×
10
10
pa,所确定的设计变量有4个分别为x1、x2、x3、x4。
[0041]
b2、执行网格无关性检验并选择适合的方案。
[0042]
在步骤c中,利用试验设计技术产生初始样本集合并调用静力学仿真模型获取初始样本的响应值,该步骤具体为:
[0043]
c1、利用拉丁超立方试验设计方法生成初始样本点;
[0044]
拉丁超立方试验设计方法生成初始样本的过程为:1)将4个设计变量均等分成m个区间;2)在每个设计变量的区间内随机取值;3)根据变量值随机选取配对,已经取过的分量不再选择,从而构成4维空间,样本数为m的拉丁超立方设计。
[0045]
c2、调用静力学仿真模型获取初始样本针对最大应力的响应值;
[0046]
利用拉丁超立方试验设计方法生成的样本点,并调用静力学仿真模型,获取相应样本点的响应值。
[0047]
在步骤d中,通过初始样本及其响应值,利用kriging近似方法和rbf近似方法构建初始代理模型。
[0048]
在步骤e中,通过eoasm算法构建满足精度要求的码垛机器人驱动臂座的最大应力的最终组合代理模型具体步骤为:
[0049]
e1、根据步骤a、b、c和d得到码垛机器人驱动臂座的几何模型,确定性能函数为码垛机器人驱动臂座的最大应力,包括设计变量的个数以及其取值范围,具体形式为:
[0050]
f
stress
为性能函数,代表码垛机器人驱动臂座所受最大应力,式中的x1,x2,x3,x4分别为模型的四个设计变量,具体含义如下,
[0051]
x1:码垛机器人驱动臂座的前板厚度,取值范围13-18mm;
[0052]
x2:码垛机器人驱动臂座的后板厚度,取值范围8-13mm;
[0053]
x3:码垛机器人驱动臂座的后板厚度,取值范围20-25mm;
[0054]
x4:码垛机器人驱动臂座的加强筋厚度,取值范围8-13mm。
[0055]
e2、利用初始样本分别获取kriging和rbf代理模型每个点的局部误差,以及整个模型的局部误差均值,主要有以下几个步骤:
[0056]
(1)根据初始样本及其响应值构建kriging和rbf代理模型;
[0057]
(2)局部误差用绝对误差(absolute error,ae)评价,利用交叉验证分别获得每个样本点的局部误差;
[0058]
(3)计算局部误差期望e[ae],表达式如下所示:
[0059][0060]
式中,ae
i
为每一个样本点的绝对误差,n为样本点个数。
[0061]
e3、通过局部误差期望加点准则进行迭代求解,增加新的样本点,并获取其响应值,具体过程如下:
[0062]
(1)计算样本点支配半径。由于拉丁超立方抽样确定的初始样本点具有一定的样本均布性,可以给每个样本点设置相同的加点半径。n个样本点可以将设计空间n-1部分,为确保每个样本点的加点半径尽可能不相交,本专利提出样本点支配半径的概念,样本点第j
个维度坐标的支配半径r
j
,表达式如下:
[0063][0064]
式中,n为维度大小,x
jmax
与x
jmin
分别为该工程问题设计空间不同维度的上下限。则每个样本点的加点半径r=(r1,r2,...r
j
,...r
n
)。
[0065]
(2)获取新样本点。当ae
i
>e[ae]时,可知此样本点非线性程度比较大,其预测不确定性比已有样本点的平均预测不确定性大,所以在此样本点的支配半径r内等概率随机加入一个样本点。
[0066]
(3)对于新获取的样本点,代入静力学仿真计算出其真实的最大应力响应值。
[0067]
e4、基于e3中已更新的样本集,重新建立kriging和rbf代理模型;
[0068]
e5、检查收敛准则,如果满足,得到最终单一代理模型,进而构建最终的码垛机器人驱动臂座所受最大应力的组合代理模型,否则返回e2继续迭代加点。最终组合代理模型的构建步骤为:
[0069]
(1)计算收敛后的kriging代理模型和rbf代理模型的权系数,其权系数计算公式为:
[0070][0071]
式中,p
i
为第i个样本点处的press值,y
i
为第i个样本点真实响应值,为第i个样本点在除去自身外所有样本点构成的代理模型中的预测响应值。
[0072]
(2)进而通过对各单一代理模型进行线性加权获得最终的码垛机器人驱动臂座的最大应力的组合代理模型。
[0073]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1