一种合成孔径雷达海冰漂移探测方法、系统、设备及应用与流程
[0001]
本发明属于海冰动力学特性数据处理技术领域,尤其涉及一种合成孔径雷 达海冰漂移探测方法、系统、设备及应用。
背景技术:
[0002]
目前:海冰漂移强烈影响极区海冰厚度分布,进一步控制海洋—大气—海 冰三者的能量通量交互。另外,极地海冰由高纬度向低纬度漂移并最终融化的 过程,是地表淡水的重要来源,在世界海洋动力学中起着重要作用。因此,在 大范围的空间和时间尺度上估计海冰漂移能够有助于理解和描述海冰动力学特 性,同时也有助于更好地了解全球气候变化过程。在全球气候变化、海冰范围 不断缩小的大背景下,极区的海上航运和海上作业活动呈激增趋势,这要求高 精度、高分辨率、近实时的监测海冰漂移过程,以降低极地冰区的作业事故风 险。例如,2012年夏季,楚科奇海的一次海上石油钻探突然停止,就是因为不 可预测的碎冰入侵,从而威胁到人员和船舶的安全。随着极区海上活动的增加, 以及海冰力学强度变弱和流动性变强,这些事件将变得更加普遍。
[0003]
遥感技术是开展海冰漂移监测的有效手段。在过去几十年中,基于微波辐 射计和微波散射计已能够提供分辨率为6-50km的海冰漂移产品。但这些数据的 分辨率太粗,无法提供精细的海冰漂移产品,也无法观测到海冰运动时产生的 形变特征,这类产品对海上作业、极区海上航行安全等活动的帮助有限。与微 波辐射计和微波散射计相比,合成孔径雷达(sar)不仅不受云雾和光照影响, 而且具有高分辨率的优势(通常为几米或几十米),能够提供高分辨率的海冰 漂移产品,逐渐成为极地海冰漂移监测的主要传感器。
[0004]
当前主流的sar海冰漂移探测方法可分为模式匹配方法(pattern matching, pm)和特征跟踪方法(feature tracking,ft)两大类。模式匹配方法是一种基 于移动模板的图像匹配方法,归一化互相关(normalized cross-correlation,ncc) 和最大互相关(maximum cross-correlation,mcc)是最早应用于sar海冰漂移 探测的两种pm方法。thomas(2008)利用改进的归一化互相关算法,实现了 高分辨sar海冰漂移探测。lavergne等(2010)使用mcc算法提取了quickscat 散射计和ssm/i辐射计的海冰漂移场,得到了与浮标数据较为一致的海冰漂移 结果。fanny等(2012)在融合quickscat、ascat、ssm/i多源遥感数据的 基础上,使用mcc算法对极地海冰漂移进行了监测。然而,ncc和mcc方法 易受sar图像噪声影响,且对旋转漂移的海冰失效。为了克服模式匹配方法不 能探测旋转海冰的缺陷,相位相关(phase correlation,pc)提出用于探测海冰 漂移。thomas等(2011)构建的高分辨率海冰漂移跟踪系统就是采用的串联结 构式的相位相关方法。alexander等(2012)将pc方法应用于radarsat-2 双极化sar数据的海冰漂移探测监测。pc方法相较于mcc或ncc方法,虽 然能够提高算法的抗噪能力,但总的来说模式匹配这类方法,依赖于两个时序 图像有明显相似的特征。对于当前大幅宽的sar图像来说,其入射角范围跨度 大,相似区域在不同的入射角情况下,相似性明显降低,在一定情况下会降低 匹配率。另外,模式匹配方法在操作时需要对两个时序图像分别进行滑窗运算, 对于当前大幅宽sar图像而言(例如分辨
率为40m的sentinel-1),计算耗时 长、效率低,且生成的海冰漂移产品分辨率与采用的滑窗大小相同(通常为原 分辨率的10倍以上),低于sar图像的原始分辨率。
[0005]
相对于模式匹配方法,特征跟踪是基于图像特征点的匹配方法。在海冰漂 移遥感探测中比较有代表性的是sift(scale invariant feature transform)和 surf(speeded-up robustfeatures)方法,但这两种方法受sar斑点噪声的影 响,匹配错误率较高。针对这些问题,muckenhuber(2016)等提出使用改进的orb (oriented fast and rotated brief)算法对sentinel-1双极化sar图像了进行 海冰漂移探测,该方法在合适的阈值条件下,能够减低错误匹配的产生。尽管 特征跟踪方法具有速度快、计算复杂度低的优势,但总体上而言该方法仍存在 较多的错误匹配的情况,影响了探测精度;另外,在增加控制错误匹配的处理 以后,海冰漂移的分布结果在空间分布上非常不均匀、不连续。
[0006]
针对模式匹配方法和特征跟踪方法的优势与不足,近年来许多学者尝将这 两类方法结合进行海冰漂移探测。berg等(2014)在pc算法中引入了最小平均 残差算法(lara),通过约束pc算法的待匹配区域,提高了envisat asar 数据的海冰漂移探测精度。jeong(2017)先使用rifi算法(repeat image featuretracking)获得先验的海冰漂移信息,由此来限制ncc的搜索区域,以确定最可 能的位移,缩短了计算时间并提高了匹配成功率。muckenhuber(2017)和korosov 等(2017)的研究有相同之处,muckenhuber使用orb方法对海冰漂移速度和 方向进行第一次估计,再将初猜的漂移向量作为ncc算法的初始搜索位置,从 而得到格网化的海冰漂移矢量。korosov先使用sifi初步估出海冰漂移的大致 方向和速度,将其提供的向量作为ncc算法的初始搜索位置,从而得到较为精 确的漂移向量。
[0007]
然而利用高分辨率sar开展海冰漂移当前还存在以下问题:1)首先在方 法层面,无论是pm还是ft方法的都还需要克服噪声、入射角不同所引起的亮 度和对比度变化,以及多时相同名点匹配的正确率等问题。2)当前的sar数 据具有大幅宽、高分辨率的特性(如sentinel-1iw模式的分辨率为5
×
20m,幅 宽为250km;radarsat-2的the extra fine mode,分辨率为5m,幅宽为125 km),数据量大幅增加,海冰漂移监测算法的计算效率亟待提高。3)面对现今 海量的sar数据,需要发展全自动、无人工干预的海冰漂移探测方法。
[0008]
通过上述分析,现有技术存在的问题及缺陷为:
[0009]
(1)在方法层面,无论是pm还是ft方法的都还需要克服噪声、入射角 不同所引起的亮度和对比度变化,以及多时相同名点匹配的正确率。
[0010]
(2)当前的sar数据具有大幅宽、高分辨率的特性,数据量大幅增加, 海冰漂移监测算法的计算效率亟待提高。
[0011]
(3)面对现今海量的sar数据,需要发展全自动、无人工干预的海冰漂 移探测方法。
[0012]
解决以上问题及缺陷的意义为:通过解决上述问题和缺陷,能够实现海冰 漂移的全自动探测,并利用sar高分辨率的优势,得到高分辨率的、准实时海 冰漂移场,满足从海量sar数据中实现高分辨率(亚公里尺度)的海冰漂移自 动探测需求,为当前掌握极区海冰动力学性质,服务极区航运提供技术支撑。
技术实现要素:
[0013]
针对现有技术存在的问题,本发明提供了一种合成孔径雷达海冰漂移探测 方法、
系统、设备及应用。
[0014]
本发明是这样实现的,一种合成孔径雷达海冰漂移探测方法,所述合成孔 径雷达海冰漂移探测方法包括:
[0015]
对sar数据进行降分辨率处理,提取低分辨率图像中的冰裂缝区域;
[0016]
冰裂缝区域常为长条特征,具有高旋转不变形以及较强的抗噪能力,使用 pm方法在规则网格上对低分辨率sar图像进行第一次漂移估计,提取冰区的 整体漂移方向和速度,称为主方向;
[0017]
将提取的主方向约束ft方法对原始分辨率sar图像中的搜索和匹配区域, 得到海冰漂移结果。
[0018]
进一步,所述合成孔径雷达海冰漂移探测方法从sar多尺度观测的思路出 发,在低分辨率尺度上通过探测与周边冰区散射强度显著不同、且受噪声影响 小的冰裂缝区,并通过冰裂缝结构来探测sar图像中海冰区的整体漂移情况, 即主方向。
[0019]
进一步,所述合成孔径雷达海冰漂移探测方法利用提取的海冰漂移整体速 度和方向,约束高分辨率尺度的同名点匹配搜索区域。
[0020]
进一步,所述合成孔径雷达海冰漂移探测方法提取匹配样本的方法包括:
[0021]
(1)图像分割依据某一分割阈值t将原图像分成两类,使得两类的类间方 差为最大;
[0022]
(2)匹配样本提取,经过二值化分割后的sar图像中,其中的暗区域为 候选匹配样本,采用面积阈值th消除这些碎斑,其中面积是指图像的像素个数, 选择的面积阈值th为30,若斑块的面积小于30则将其去除;
[0023]
候选区域扩大的处理方法为:(a)依次求出剩余暗斑的外接矩形位置和外接 矩形长宽,并选择其中外接矩形面积最大的暗斑区域n;(b)根据暗斑区域n的 中心点位置与其它特征区域中心点位置之差来判断是否可进行候选区域扩大;(c) 若该差值在某一阈值范围nm
p
内,则认为可进行特征区域扩大:
[0024][0025]
式中n
x
为最大暗斑区域n外接矩形的x坐标,p(i)
x
为除n外第i个暗斑区 域的外接矩形的x坐标位置,d
ix
为x方向上n与p(i)之间的距离;同理d
iy
为y 方向上n与p(i)之间的距离;只有当d
ix
和d
iy
都小于阈值nm
p
时,特征区域p(i) 与n才可进行拼合,nm
p
的最优取值为30;
[0026]
可进行拼合的暗斑区域共n个,则以这n个特征区域的最小和最大坐标位 置,确定最终匹配样本t
sw
的起始坐标,计算公式如下:
[0027][0028][0029]
式中,f
x
和f
y
分为匹配样本t
sw
在x轴方向和y轴方向的起始坐标,f
w
和 f
h
分别匹配样本的宽和高,min和max为最小值和最大值。
[0030]
进一步,所述合成孔径雷达海冰漂移探测方法海冰漂移主方向提取包括:
[0031]
(1)以200像素为间隔对第一景降采样海冰纹理均值图像划分出若干子图像 s
w
(w=1,2
…
n),n为划分出的子图像数目;
[0032]
(2)在每个子图像中提取匹配样本t
sw
,然后使用ncc算法在第二景图像中 进行搜索,得到与t
sw
相匹配的样本区域t
sw’;
[0033]
(3)根据t
sw
在s
w
中的相对位置,计算s
w
在第二景图像中对应的子图像s
w’;
[0034]
(4)根据匹配样本t
sw
在两个图像中的位置,估算子图像对(s
w
,s
w’)的海冰漂 移主方向,计算公式如下:
[0035][0036]
式中,和分别为子图像对(s
w
,s
w’)的漂移主方向;和分别为第一景 图像的匹配样本t
sw
的图像坐标;和分别为第二景图像的搜索出的匹配样 本t
sw’的图像坐标;β为图像的降采样倍数,β取为10。
[0037]
进一步,所述合成孔径雷达海冰漂移探测方法采用基于海冰漂移主方向约 束的快速surf算法对sar图像实现高分辨率的海冰漂移场探测,对surf或 sift方法进行改进,包括:
[0038]
(1)针对原始分辨率的海冰纹理均值时序图像进行的;
[0039]
(2)基于获取的两景时序海冰纹理均值图像的子图像对(s
w
,s
w’),使用 surf方法分别提取每个子图像对的特征点集f
i
(i=1,2
…
m),f
′
j
(j=1,2
…
n);其 中f
i
为第一景子图像的特征点集,共有m个;f
′
j
为第二景子图像的特征点集,共 有n个;
[0040]
(3)基于获取的每个子图像的海冰漂移主方向预测第一景子图像 中第k个特征点f
i,k
,在第二景子图像中的位置(x
b
,y
b
);
[0041]
(4)在第二景子图像中,提取以位置(x
b
,y
b
)为中心,在边长为w(的正方 形区域内的所有为f
′
j
的子集;
[0042]
(5)计算中所有特征点与f
i,k
的欧式距离d
i
,当d
i
小于判定阈值d,则判 定特征点匹配成功;
[0043]
(6)待全部特征点遍历完成后结束操作。
[0044]
本发明的另一目的在于提供一种计算机设备,所述计算机设备包括存储器 和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行 时,使得所述处理器执行如下步骤:
[0045]
对sar数据进行降分辨率处理,提取低分辨率图像中的冰裂缝区域;
[0046]
冰裂缝区域常为长条特征,具有高旋转不变形以及较强的抗噪能力,使用pm方法在规则网格上对低分辨率sar图像进行第一次漂移估计,提取冰区的 整体漂移方向和速度,称为主方向;
[0047]
将提取的主方向约束ft方法对原始分辨率sar图像中的搜索和匹配区域, 得到海冰漂移结果。
[0048]
本发明的另一目的在于提供一种计算机可读存储介质,存储有计算机程序, 所述
计算机程序被处理器执行时,使得所述处理器执行如下步骤:
[0049]
对sar数据进行降分辨率处理,提取低分辨率图像中的冰裂缝区域;
[0050]
冰裂缝区域常为长条特征,具有高旋转不变形以及较强的抗噪能力,使用 pm方法在规则网格上对低分辨率sar图像进行第一次漂移估计,提取冰区的 整体漂移方向和速度,称为主方向;
[0051]
将提取的主方向约束ft方法对原始分辨率sar图像中的搜索和匹配区域, 得到海冰漂移结果。
[0052]
本发明的另一目的在于提供一种实施所述合成孔径雷达海冰漂移探测方法 的合成孔径雷达海冰漂移探测系统,所述合成孔径雷达海冰漂移探测系统包括:
[0053]
冰裂缝区域图像提取模块,用于对sar数据进行降分辨率处理,提取低分 辨率图像中的冰裂缝区域;
[0054]
冰区整体漂移方向和速度提取模块,用于将冰裂缝区域常为长条特征,具 有高旋转不变形以及较强的抗噪能力,使用pm方法在规则网格上对低分辨率 sar图像进行第一次漂移估计,提取冰区的整体漂移方向和速度;
[0055]
海冰漂移结果输出模块,用于将提取的主方向约束ft方法对原始分辨率 sar图像中的搜索和匹配区域,得到海冰漂移结果。
[0056]
本发明的另一目的在于提供一种海冰漂移监测终端,所述海冰漂移监测终 端搭载所述的合成孔径雷达海冰漂移探测系统。
[0057]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:从海量sar 数据中实现高分辨率(亚公里尺度)的海冰漂移自动探测,是当前掌握极区海 冰动力学性质,更好的了解全球气候变化的重要需求。为此,本发明发展了一 种全自动的sar海冰漂移探测方法,基于多尺度观测思想实施的。首先在低分 辨率尺度上通过探测与周边冰区散射强度显著不同、且受噪声影响小的冰裂缝 区,并通过这些冰裂缝结构来探测sar图像中海冰区的整体漂移情况,即主方 向。然后利用该区域的海冰整体漂移情况,约束同名特征点匹配搜索区域。从 而降低计算时间和提高特征点匹配率和漂移探测精度。本发明利用了北极3对 双极化sentinel-1sar影像开展实验验证。
[0058]
实验结果表明,本发明所发展的方法不仅用时最少,而且提取的海冰漂移 矢量无论是空间密度还是区域覆盖度都远多于经典的surf方法和ncc方法。 在海冰漂移速度和漂移方向探测精度方面,对于hh极化,本发明提出方法的 海冰漂移速度反演的rmse为0.158cm/s,相对误差(re)为1.838%;海冰漂 移方向反演的rmse为0.112
°
,re为0.267%。对于hv极化,海冰漂移速度 反演的rmse为0.138cm/s,re为1.504%;海冰漂移方向反演的rmse为0.123
°
, re为0.753%。对于两种极化方式,本发明所发展的方法均优于经典的surf 和ncc方法。
附图说明
[0059]
为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所 需要使用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本申请 的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下 还可以根据这些附图获得其他的附图。
[0060]
图1是本发明实施例提供的合成孔径雷达海冰漂移探测方法流程图。
[0061]
图2是本发明实施例提供的合成孔径雷达海冰漂移探测系统的结构示意图;
[0062]
图2中:1、冰裂缝区域图像提取模块;2、冰区整体漂移方向和速度提取 模块;3、海冰漂移结果输出模块。
[0063]
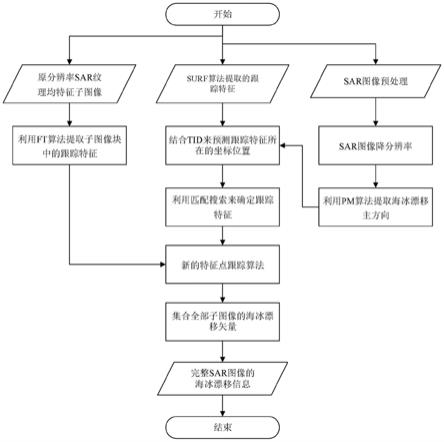
图3是本发明实施例提供的合成孔径雷达海冰漂移探测方法实现流程图。
[0064]
图4(a)是本发明实施例提供的sar图像。
[0065]
图4(b)是本发明实施例提供的sar图像直方图和两种阈值方案(xxxx)
[0066]
图4(c)是本发明实施例提供的使用传统的ostu算法对sar海冰图像进 行二值化分割示意图。
[0067]
图4(d)是本发明实施例提供的二值化阈值调整为0.4t后的结果示意图。
[0068]
图5(a)是本发明实施例提供的海冰漂移主方向探测结果,方框为冰裂缝 在第一景图像中的位置示意图。
[0069]
图5(b)是本发明实施例提供的海冰漂移主方向探测结果,方框为冰裂缝 在第二景图像中的位置示意图,图中的箭头表示该冰裂缝的漂移方向和位置。
[0070]
图6是本发明实施例提供的基于海冰漂移主方向约束的快速surf算法示 意图。
[0071]
图7(a)是本发明实施例提供的该算法的海冰漂移检测结果示意图,左边 为hh,右边为hv。
[0072]
图7(b)是本发明实施例提供的surf算法的海冰漂移检测结果示意图, 左是hh和右是hv。
[0073]
图7(c)是本发明实施例提供的ncc算法的海冰漂移检测结果示意图,左 是hh,右是hv。
具体实施方式
[0074]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例, 对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以 解释本发明,并不用于限定本发明。
[0075]
针对现有技术存在的问题,本发明提供了一种合成孔径雷达海冰漂移探测 方法、系统、设备及应用,下面结合附图对本发明作详细的描述。
[0076]
如图1所示,本发明提供的合成孔径雷达海冰漂移探测方法包括以下步骤:
[0077]
s101:对sar数据进行降分辨率处理,提取低分辨率图像中的冰裂缝区域;
[0078]
s102:冰裂缝区域常为长条特征,具有高旋转不变形以及较强的抗噪能力, 使用pm方法在规则网格上对低分辨率sar图像进行第一次漂移估计,提取冰 区的整体漂移方向和速度,称为主方向;
[0079]
s103:将提取的主方向约束ft方法对原始分辨率sar图像中的搜索和匹 配区域,得到海冰漂移结果。
[0080]
本发明提供的合成孔径雷达海冰漂移探测方法业内的普通技术人员还可以 采用其他的步骤实施,图1的本发明提供的合成孔径雷达海冰漂移探测方法仅 仅是一个具体实施例而已。
[0081]
如图2所示,本发明提供的合成孔径雷达海冰漂移探测系统包括:
[0082]
冰裂缝区域图像提取模块1,用于对sar数据进行降分辨率处理,提取低 分辨率图像中的冰裂缝区域;
[0083]
冰区整体漂移方向和速度提取模块2,用于将冰裂缝区域常为长条特征,具 有高旋转不变形以及较强的抗噪能力,使用pm方法在规则网格上对低分辨率 sar图像进行第一次漂移估计,提取冰区的整体漂移方向和速度;
[0084]
海冰漂移结果输出模块3,用于将提取的主方向约束ft方法对原始分辨率 sar图像中的搜索和匹配区域,得到海冰漂移结果。
[0085]
下面结合附图对本发明的技术方案作进一步的描述。
[0086]
本发明采用快速、高效、全自动的海冰漂移探测方法,首先从sar多尺度 观测的思路出发,在低分辨率尺度上通过探测与周边冰区散射强度显著不同、 且受噪声影响小的冰裂缝区,并通过冰裂缝结构来探测sar图像中海冰区的整 体漂移情况,即主方向。然后,利用提取的海冰漂移整体速度和方向,约束高 分辨率尺度(如,原始分辨率sar)的同名点匹配搜索区域,在降低计算时间 的同时提高特征点匹配率和漂移探测精度。
[0087]
本发明的方式设计思路为:首先对sar数据进行降分辨率处理,提取低分 辨率图像中的冰裂缝区域。冰裂缝区域常为长条特征,具有高旋转不变形以及 较强的抗噪能力,所以以此为特征使用pm方法在规则网格上对低分辨率sar 图像进行第一次漂移估计,提取冰区的整体漂移方向和速度,本发明称为主方 向。然后将提取的主方向约束ft方法对原始分辨率sar图像中的搜索和匹配 区域,从而得到海冰漂移结果。算法流程图见图3。
[0088]
1、基于模式匹配算法的海冰漂移主方向提取算法,sar海冰漂移主方向是 表征图像中海冰整体的漂移矢量场。本发明采用ncc算法提取海冰漂移的主方 向。ncc方法的主要缺点是计算速度慢,优点是匹配正确率高。为克服计算速 度慢的问题,首先需要降低原始sar强度图像的分辨率,从而减小了图像尺寸。 经测试,可对方位向和距离向各进行10倍的降采样。同时,由于采用的是降分 辨率处理,可进一步降低斑点噪声对ncc方法的影响。
[0089]
另外,为了充分发挥ncc方法匹配正确率高的优点,还需要对降分辨率的 sar强度图像进行匹配样本提取。由于在低分辨率尺度上,冰裂缝和冰间水道 等区域与周边的海冰散射强度显著不同,易于区分和捕捉,是良好的候选匹配 样本。因此如何提取匹配样本是探测海冰漂移主方向的关键。
[0090]
1.1匹配样本的自动提取
[0091]
a图像分割
[0092]
ostu算法是一种对图像进行二值化的高效算法,其思想是依据某一分割阈 值t将原图像分成两类,使得两类的类间方差为最大。图4给出了应用ostu的 图像二值化分割结果。但由图4(c)可看出,使用传统的ostu算法对sar海冰图 像进行二值化分割时,会将多数灰色区域与较暗区域归为了一类,阈值选择明 显偏大、造成黑色区域过于冗余,不利于图像的正确匹配,需要对ostu算法自 动计算的阈值进行适当降低。经实验测试,二值化阈值应调整为0.4t。图4(d) 是二值化阈值调整为0.4t后的结果,从图中可以看出图4(a)中的灰色区域得到 了较好的剔除,sar图像中绝大部分冰裂缝和冰间水道等区域被检测出来并以 黑色显示。
[0093]
b.匹配样本提取
[0094]
经过二值化分割后的sar图像中,其中的暗区域为候选匹配样本。但如图 4(d)所
示,图像中除了特征样本外,还存在很多面积很小的碎斑。本发明采用面 积阈值th消除这些碎斑,其中面积是指图像的像素个数。选择的面积阈值th 为30,若斑块的面积小于30则将其去除。
[0095]
由于这些操作都是在降采样的图像上进行的,所以由上述步骤选出匹配样 本面积都很小。如图5中,若以图5(a)红框中的暗斑为ncc方法的匹配模板, 则很容易出现误匹配的情况。但若以图5(b)中的蓝框为ncc方法的匹配模板, 则可提高匹配正确率。我们对这一处理称为“候选区域扩大”。
[0096]
候选区域扩大的处理方法为:(a)依次求出剩余暗斑的外接矩形位置和外接 矩形长宽,并选择其中外接矩形面积最大的暗斑区域n。(b)根据暗斑区域n的 中心点位置与其它特征区域中心点位置之差来判断是否可进行候选区域扩大。(c) 若该差值在某一阈值范围nm
p
内,则认为可进行特征区域扩大:
[0097][0098]
上式中n
x
为最大暗斑区域n外接矩形的x坐标,p(i)
x
为除n外第i个暗斑 区域的外接矩形的x坐标位置,d
ix
为x方向上n与p(i)之间的距离;同理d
iy
为y方向上n与p(i)之间的距离。只有当d
ix
和d
iy
都小于阈值nm
p
时,特征区域 p(i)与n才可进行拼合。本发明nm
p
的最优取值为30。
[0099]
设可进行拼合的暗斑区域共n个,则以这n个特征区域的最小和最大坐标 位置,确定最终匹配样本t
sw
的起始坐标,计算公式如下:
[0100][0101][0102]
上式中,f
x
和f
y
分为匹配样本t
sw
在x轴方向和y轴方向的起始坐标,f
w
和f
h
分别匹配样本的宽和高,min和max为最小值和最大值。
[0103]
1.2海冰漂移主方向提取
[0104]
sar图像幅宽较大(最大可达600km),海冰在风浪流的作用下,同一幅 图像中海冰的漂移趋势在不同区域是不同的。因此在提取海冰漂移主方向时, 需要考虑其区域特性。
[0105]
基于此,本发明采用如下处理:(1)以200像素为间隔对第一景降采样海冰 纹理均值图像划分出若干子图像s
w
(w=1,2
…
n),n为划分出的子图像数目。(2)在 每个子图像中提取匹配样本t
sw
,然后使用ncc算法在第二景图像中进行搜索, 得到与t
sw
相匹配的样本区域t
sw’。(3)根据t
sw
在s
w
中的相对位置,计算s
w
在 第二景图像中对应的子图像s
w’。(4)根据匹配样本t
sw
在两个图像中的位置,估 算子图像对(s
w
,s
w’)的海冰漂移主方向,计算公式如下:
[0106][0107]
上式中,和分别为子图像对(s
w
,s
w’)的漂移主方向;和分别为第一 景
图像的匹配样本t
sw
的图像坐标;和分别为第二景图像的搜索出的匹配 样本t
sw’的图像坐标;β为图像的降采样倍数,本发明中β取为10。
[0108]
基于模式匹配算法的海冰漂移主方向提取的输入和输出为:
[0109]
输入:
[0110]
降分辨率处理后的sar海冰图像对(image 1,image 2)
[0111]
输出:
[0112]
子图像对数量num
[0113]
每个子图像对的参数(子图像对在image 1和image2中的起始坐标和子图 像长宽)
[0114]
每个子图像对的海冰漂移主方向(和)
[0115]
注意:上述子图像对的起始坐标和子图像长宽为降采样后的数值,将它们 乘以降采样倍数β,即可得到原始分辨率的子图像对信息。图5(a)和图5(b) 所展示的例子为从两个图像中提取到的子图像对。
[0116]
从图5(a)和图5(b)可以看出,本方法从两个时序图像中提取的子图像 对,在海冰几何形态、灰度特征上均一致,由此也验证了所提取的子图像对是 正确的。
[0117]
2基于海冰漂移主方向约束的快速surf算法
[0118]
ft方法是获取高分辨率的海冰漂移矢量场的有效方法,如surf和sift 方法已在光学遥感数据中得到了成功的应用。但这些方法应用于sar图像时, 探测性能并不稳定。因为surf和sift方法这些方法假设图像噪声是高斯分布 的,并使用高斯尺度空间表示进行特征提取。众所周知,高斯模糊不仅不能保 持重要的图像细节,而且在一定程度上会模糊图像细节和噪声的区分。考虑到 surf和sift方法在进行特征点匹配时,是计算特征点集中具有最近欧式距离 的特征点与具有次近欧式距离特征点的欧式距离之比,当其比值满足阈值条件 时,即为匹配成功。所以图像细节与图像噪声间的模糊会造成大量的误匹配, 因此要对sar图像实现高分辨率的海冰漂移场探测,需要对surf或sift方 法进行改进。
[0119]
本发明采取的改进方法为:
[0120]
step 1针对原始分辨率的海冰纹理均值时序图像进行的。
[0121]
step 2基于获取的两景时序海冰纹理均值图像的子图像对(s
w
,s
w’),使用 surf方法分别提取每个子图像对的特征点集f
i
(i=1,2
…
m),f
′
j
(j=1,2
…
n);其 中f
i
为第一景子图像的特征点集,共有m个;f
′
j
为第二景子图像的特征点集,共 有n个。
[0122]
step 3基于获取的每个子图像的海冰漂移主方向预测第一景子图像 中第k个特征点f
i,k
,在第二景子图像中的位置(x
b
,y
b
)。
[0123]
step 4在第二景子图像中,提取以位置(x
b
,y
b
)为中心,在边长为w(本发明 中为100个像素)的正方形区域内的所有(为f
′
j
的子集)。
[0124]
step 5计算中所有特征点与f
i,k
的欧式距离d
i
,当d
i
小于判定阈值d,则判 定特征点匹配成功。
[0125]
step 6待全部特征点遍历完成后结束操作。
[0126]
图6中s
w
为第一个图像的子图像,s
w’为第二个图像的子图像;蓝色点和黑 色点分
别为s
w
和s
w’中的特征点。以s
w
中任意一个特征点f
i
为例,首先根据海 冰漂移主方向预测其在第二个子图像中的位置(图6中灰色点),然后计算子图 像s
w’中所有的候选特征点与f
i
的欧式距离,当欧式距离小于判定阈值d时,则 匹配成功。其中候选特征点与待匹配特征点的欧式距离计算公式如下:
[0127][0128]
对于判定阈值d的本发明取值为0.1。完成全部特征点的匹配后,将匹配特 征点在两个时序图像中的经纬度差转换为距离差,再除以两景图像的成像时间 差,即可得到海冰漂移矢量。
[0129]
下面结合附图对本发明的技术效果作详细的描述。
[0130]
图7(b)第二组图像对的海冰漂移探测结果,自上至下分别为本发明方法、 surf和ncc的海冰漂移探测结果。由图7可知,本发明提出的方法对于hh 极化可提取到377个漂移矢量,hv极化可提取到604个漂移矢量。surf算法 对于hh极化提取到的漂移矢量为181个,hv极化为277个;ncc算法对于 hh极化提取到的漂移矢量为84个,hv极化为82个。由此可见,本发明提出 的算法可探测到的海冰漂移矢量多于surf和ncc算法。
[0131]
表1给出了三种方法在海冰漂移速度和海冰漂移方向的探测精度,参考数 据为目视解译提取的海冰漂移速度和方向。由表1可知,对于hh极化,本发 明方法探测的海冰漂移矢量的rmse为(0.104cm/s,0.124
°
),re为(2.378%, 0.334%);surf算法和ncc算法的海冰漂移矢量rmse分别为(1.891cm/s, 1.395
°
)和(1.282cm/s,6.053
°
),re为(27.323%,3.556%)和(11.165%, 7.278%)。对于hv极化,本发明方法的海冰漂移矢量的rmse为(0.0996cm/s, 0.143
°
),re为(2.218%,0.0906%);surf算法和ncc算法的rmse分别为 (1.264cm/s,0.914
°
)和(6.026cm/s,11.552
°
),re为(18.662%,2.492%) 和(35.554%,13.308%)。
[0132]
表1第二组数据的海冰漂移探测误差统计
[0133][0134][0135]
下面结合具体实施例对本发明的技术方案作进一步的描述。
[0136]
1、本发明数据源和研究区域概况,本发明采用的数据为sentinel-1数据。 sentinel-1是欧空局发射的c波段sar卫星,由两颗分别于2014年4月和2016 年4月发射的sentinel-1a与sentinel-1b极轨卫星组成,可实现每6天覆盖全球 一次,极大的提高了极地海冰的监测能力。sentinel-1除了有条带模式 (stripmapmode,sm)和波模式(wave mode,wv)外,还具有双极化宽幅 干涉模式(interferometric wide swath,iw)和双极化超宽幅模式(extra wideswath,ew)。与ers-1/2和envisat asar卫星相比,不仅极化信息更为丰 富,观测幅宽由100km提高到400km。现已成为极地海冰观测的重要数据源。
[0137]
本发明采用了3对6景sentinel-1level-1 grd sar数据,它们可由 https://scihub.copernicus.eu免费下载获得。前2景数据位于斯瓦尔巴群岛附近的 格陵兰海,后4景数据均位于北冰洋的加拿大海盆附近,该区域大部分终年被 海冰覆盖,海冰的运动受洋流和气旋作用支配,漂移和形变变化较为剧烈。表2 给出了三对sar数据的规格参数。其中,第一对与最后一对为分辨率40m的 ew模式数据,第二对为分辨率10m的iw模式数据。第一对数据的入射角范围 为29
°
—46
°
,第二对与第三对数据的入射角范围均为30
°
—45
°
。
[0138]
第一组sar图像位于78.2
°
n—83.1
°
n,4.4
°
e—17.1
°
w区域,图像获取时 间为2015年3月28日和29日。图像中以一年冰和初期冰为主,图像右侧偏下 半部分有大片的冰间裂隙。根据历史记录(https://www.timeanddate.com),当 时的温度为-31℃,风向为东北风,风速约为18km/h。在约33小时的间隔内, 海冰整体向西北漂移。
[0139]
第二组sar图像位于77.2
°
n-79.7
°
n,144.9
°
w-158.5
°
w区域,图像获取时 间为2015年11月1日和3日。图像中以一年冰和初期冰为主,没有明显的冰 间水道区域。根据记录,当时的温度为-28℃,风向为东南风,风速约为14km/h。 在约48小时的间隔内,海冰整体向西北漂移。
[0140]
第三组sar图像位于79.9
°
n-85.0
°
n,138.1
°
w-176.2
°
w区域,图像获取时 间为2015年10月7日和9日。图像中以一年冰和初期冰为主,存在较多的融 冰情况,图像中间部分分布有大片密集且分布均匀冰间水道区域。根据网站名 称记录,当时的温度为-21℃,风向为东北风,风速约为16km/h。在约23小时 的间隔内,海冰整体向东北漂移。
[0141]
表2三组sar数据参数表
[0142][0143]
2、结果及精度验证
[0144]
为评估提出方法的性能,利用第二章的3组sentinel-1sar数据开展实验, 并与ncc算法和surf算法从海冰漂移速度和方向的探测精度、海冰漂移矢量 的数据量、匹配正确率以及计算效率等方面开展对比分析。
[0145]
实验采用的计算资源为英特尔i7-8565u处理器,windows 1064bit系统, 8g内存,处理软件为matlab r2016a。另外,需要指出的是由于缺少实测的浮标 数据,本发明以目视解译结果为验证标准。
[0146]
2.1实验一
[0147]
第一组图像对的海冰漂移探测结果,自上至下分别为本发明方法、surf和 ncc的海冰漂移探测结果。图中黄色箭头方向为该点海冰漂移方向,箭头长度 越长表示海冰漂移速度越快,单位为m/s。本发明提出的方法对于hh极化可提 取到339个漂移矢量,hv极化可提取到444个漂移矢量。surf算法对于hh 极化提取到的漂移矢量为112个,hv极化为171个;ncc算法对于hh极化 提取到的漂移矢量为23个,hv极化为24个。由此可见,本发明提出的算法可 探测到的海冰漂移矢量多于surf和ncc算法。海冰漂移矢量的空间覆盖率大 幅提高。
[0148]
表4统计了三种方法的特征点正确匹配对数和计算时间。观测表4可看出, 本发明
提出的方法无论在正确匹配对数、正确匹配率和匹配时间三项指标上, 均优于surf和ncc方法。在匹配正确率方面是surf算法的8倍。在计算效 率方面,提出的方法比surf算法提高30%;比ncc算法提高近93%。
[0149]
表4第一组sar实验数据的特征点匹配统计
[0150][0151]
表4给出了三种方法在海冰漂移速度和海冰漂移方向的探测精度,参考数 据为目视解译提取的海冰漂移速度和方向。由表4可知,对于hh极化,本发 明方法探测的海冰漂移矢量的均方根误差(rmse)为(0.186cm/s,0.0289
°
)*, 相对误差(re)为(0.749%,0.0161%);surf算法和ncc算法的rmse分 别为(2.376cm/s,3.397
°
)和(0.659cm/s,0.229
°
),re为(9.129%,9.023%) 和(2.541%,0.544%)。对于hv极化,本发明方法的rmse为(0.196cm/s, 0.0111
°
),re为(0.737%,0.0269%);surf算法和ncc算法的海冰漂移矢 量反演rmse分别为(2.348cm/s,3.311
°
)和(0.723cm/s,0.409
°
),re为(8.964%, 6.493%)和(2.864%,0.903%)。
[0152]
表4第一组数据的海冰漂移探测误差统计
[0153][0154]
*:括号内前者为漂移速度的均方根误差或相对误差,后者为漂移方向的均 方根误差或相对误差
[0155]
2.2实验二
[0156]
第二组图像对的海冰漂移探测结果,自上至下分别为本发明方法、surf和 ncc的海冰漂移探测结果。本发明提出的方法对于hh极化可提取到377个漂 移矢量,hv极化可提取到604个漂移矢量。surf算法对于hh极化提取到的 漂移矢量为181个,hv极化为277个;ncc算法对于hh极化提取到的漂移 矢量为84个,hv极化为82个。由此可见,本发明提出的算法可探测到的海冰 漂移矢量多于surf和ncc算法。
[0157]
表5统计了三种方法对实验二所用图像的特征点正确匹配对数和计算时间。 观测表5和表6可看出,对于实验二本发明提出的方法无论在正确匹配对数、 正确匹配率和匹配时间三项指标上,均优于surf和ncc方法。在匹配正确率 方面约是surf算法的9倍。在计算效率方面,提出的方法比surf算法提高 33%;比ncc算法提高近95%。
[0158]
表5第二组sar实验数据的特征点匹配统计
[0159][0160]
表6第二组sar实验数据的特征点匹配统计
[0161][0162]
表7给出了三种方法在海冰漂移速度和海冰漂移方向的探测精度,参考数 据为目视解译提取的海冰漂移速度和方向。由表7可知,对于hh极化,本发 明方法探测的海冰漂移矢量的rmse为(0.104cm/s,0.124
°
),re为(2.378%, 0.334%);surf算法和ncc算法的海冰漂移矢量rmse分别为(1.891cm/s,1.395
°
)和(1.282cm/s,6.053
°
),re为(27.323%,3.556%)和(11.165%, 7.278%)。对于hv极化,本发明方法的海冰漂移矢量的rmse为(0.0996cm/s, 0.143
°
),re为(2.218%,0.0906%);surf算法和ncc算法的rmse分别 为(1.264cm/s,0.914
°
)和(6.026cm/s,11.552
°
),re为(18.662%,2.492%) 和(35.554%,13.308%)。
[0163]
表7第二组数据的海冰漂移探测误差统计
[0164][0165]
2.3实验三
[0166]
第三组图像对的海冰漂移探测结果,自上至下分别为本发明方法、surf和 ncc的海冰漂移探测结果。对于第三组数据本发明提出的方法对于hh极化可 提取到649个漂移矢量,hv极化可提取到753个漂移矢量。surf算法对于 hh极化提取到的漂移矢量为240个,hv极化为358个;ncc算法对于hh极 化提取到的漂移矢量为115个,hv极化为116个。
[0167]
表8统计了三种方法的特征点正确匹配对数和计算时间。观测表8可看出, 对于实验三本发明提出的方法无论在正确匹配对数、正确匹配率和匹配时间三 项指标上,均优于surf和ncc方法。在匹配正确率方面约为surf算法的8 倍。在计算效率方面,提出的方法比surf算法提高约30%;比ncc算法提高 近95%。
[0168]
表8第三组sar实验数据的特征点匹配统计
[0169][0170]
表9给出了三种方法在海冰漂移速度和海冰漂移方向的探测精度,参考数 据为目视解译提取的海冰漂移速度和方向。由表9可知,对于hh极化,本发 明方法探测的海冰漂移矢量的rmse为(0.173cm/s,0.144
°
),re为(2.321%, 0.441%);surf算法和ncc算法的海冰漂移矢量反演rmse分别为(0.278cm/s, 2.376
°
)和(0.472cm/s,0.415
°
),re为(4.451%,25.641%)和(8.218%, 4.262%)。对于hv极化,本发明方法的rmse为(0.0962cm/s,0.154
°
), re为(1.495,2.123%);surf算法和ncc算法的rmse分别为(0.233cm/s, 2.024
°
)和(0.338cm/s,0.368
°
),re为(3.643%,18.181%)和(4.967%, 4.007%)。
[0171]
表9第三组数据的海冰漂移探测误差统计
[0172][0173]
由三次实验可知,本发明所发展的方法不仅用时最少,而且提取的海冰漂 移矢量无论是空间密度还是区域覆盖度都远多于surf方法和ncc方法。特征 点匹配正确率为87.72%,也优于surf的11.78%和ncc的85.9%。综合三次 实验的海冰漂移矢量的探测精度可知,对于hh极化,本发明提出方法的rmse 为(0.158cm/s,0.112
°
),re为(1.838%,0.267%);hv极化的rmse为(0.138 cm/s,0.123
°
),re为(1.504%,0.753%)。两种极化的海冰漂移探测结果均 显著优于surf和ncc方法。
[0174]
应当注意,本发明的实施方式可以通过硬件、软件或者软件和硬件的结合 来实现。硬件部分可以利用专用逻辑来实现;软件部分可以存储在存储器中, 由适当的指令执行系统,例如微处理器或者专用设计硬件来执行。本领域的普 通技术人员可以理解上述的设备和方法可以使用计算机可执行指令和/或包含在 处理器控制代码中来实现,例如在诸如磁盘、cd或dvd-rom的载体介质、诸 如只读存储器(固件)的可编程的存储器或者诸如光学或电子信号载体的数据载 体上提供了这样的代码。本发明的设备及其模块可以由诸如超大规模集成电路 或门阵列、诸如逻辑芯片、晶体管等的半导体、或者诸如现场可编程门阵列、 可编程逻辑设备等的可编程硬件设备的硬件电路实现,也可以用由各种类型的 处理器执行的软件实现,也可以由上述硬件电路和软件的结合例如固件来实现。
[0175]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于 此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明 的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的 保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1