一种星上恒星目标跟踪方法
1.本发明涉及一种星上恒星目标跟踪方法。
背景技术:
2.随着航天技术的不断进步与成熟,人类已陆续开展了200多次深空探测活动,深空探测已成为航天领域的重要发展方向之一。通过深空探测,能帮助研究太阳系及宇宙起源、演变及现状,进一步认识地球环境的形成和演变,认识空间现象和地球自然系统之间的关系,对深空探测和开发具有十分重要的科学和经济意义。研制空间目标载荷星上探测,验证空间天基光学探测、在轨目标实时检测等关键技术,开展空间目标天基系统探测能力、定位精度等验证试验,提升我国天基空间目标探测能力。
3.为探测遥远恒星及周围的行星,需要将星上望远镜精准指向固定天区,实现长时间曝光成像以获取弱目标信息。但是飞行器上望远镜在实际工作中,飞行器相对运动对长时间曝光恒星观测会带来影响,并且目前普遍采用星敏感器定姿,计算过程繁杂,嵌入式软件不易实现。
技术实现要素:
4.有鉴于此,有必要提供一种星上恒星目标跟踪方法。
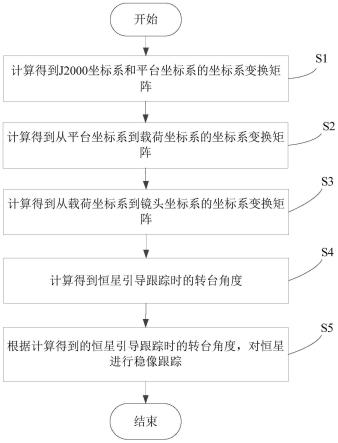
5.本发明提供一种星上恒星目标跟踪方法,该方法包括如下步骤:a.通过星上平台的平台姿态参数计算得到j2000坐标系和平台坐标系的坐标系变换矩阵;b.计算得到从平台坐标系到载荷坐标系的坐标系变换矩阵;c.计算得到从载荷坐标系到镜头坐标系的坐标系变换矩阵;d.计算得到恒星引导跟踪时的转台角度;e.根据计算得到的恒星引导跟踪时的转台角度,对恒星进行稳像跟踪。
6.具体地,所述方法在步骤a之前还包括步骤:
7.星上平台收到下发的星上恒星跟踪指令。
8.具体地,所述平台姿态参数包括:船上时、惯性姿态四元数、惯性姿态运动角速度。
9.具体地,所述的步骤a具体包括如下步骤:
10.步骤s11,计算t
a0
时刻从j2000坐标系到平台坐标系的坐标变换矩阵a(t
a0
);
11.在船上时t
a0
时刻,对应平台惯性姿态四元数[q1,q2,q3,q4],因此,j2000到t
a0
时刻平台坐标系的坐标变换矩阵如下:
[0012][0013]
步骤s12,计算时间间隔δt从j2000坐标系到平台坐标系姿态角增量对应的坐标变换矩阵b;
[0014]
在船上时t
a0
时刻对应的惯性姿态运动角速度矢量[ω
x0
,ω
y0
,ω
z0
],设δt是从起始时刻至计算采样时刻的时长,经历δt后旋转角速度β如下:
[0015][0016]
计算旋转方向单位矢量ra:
[0017][0018]
姿态角增量对应的坐标变换矩阵b求解步骤如下:
[0019]
δb=β
×
δt
[0020][0021][0022]
步骤s13,计算得到从t
a0
到t
a0
+δt时刻j2000坐标系和平台坐标系的坐标变换矩阵m1:
[0023]
m1=a(t
a0
)
×
b。
[0024]
具体地,所述的步骤b具体包括:
[0025]
通过地面处理获取的定标图像数据得到平台坐标系到载荷坐标系的坐标系变换矩阵m2,标定m2的步骤包括:
[0026]
步骤s21,载荷坐标系按照俯仰运动、方位运动后与镜头坐标系平行。因此将转台置于零位时认为镜头坐标系与载荷坐标系重合。将转台置于零位时对已知恒星成像,查找星表获取恒星在j2000坐标系下坐标。通过下传图像得到该恒星在镜头坐标系下坐标,计算从j2000到镜头坐标系的坐标变换矩阵mz。
[0027]
步骤s22,根据拍摄图像时的姿态广播数据,计算在载荷的曝光时刻,从j2000坐标系到平台坐标系的坐标变换矩阵m
at
。
[0028]
步骤s23,计算m2。
[0029]
m2=m
zmat
。
[0030]
具体地,所述的步骤c包括:
[0031]
设初始时刻转台角度为[e0,a0],从载荷坐标系到镜头坐标系的坐标变换矩阵m
g0
为:
[0032][0033]
经过i段时间后,转台角度为[e
t
,a
t
],从载荷坐标系到镜头坐标系的坐标变换矩阵m
gt
为:
[0034]
[0035]
其中,g
t
为理论像旋角速度,下传至地面,作为地面处理的辅助信息。
[0036]
具体地,所述的步骤d包括:
[0037]
步骤s41,设在曝光起始时刻t
a0
,转台角度为[e0,a0],从j2000坐标系到镜头坐标系的变换矩阵为:
[0038]mp0
=m
g0
m2a(t
a0
)
[0039]
上式中,m
g0
参数为转台角度[e0,a0],a(t
a0
)为t
a0
时刻j2000坐标系到平台坐标系变换矩阵。
[0040]
步骤s42,计算t
a0
+δt时刻,从j2000坐标系到镜头坐标系的变换矩阵为:
[0041]mp
=m
gt
m2m1[0042]
上式中,m
gt
参数为转台角度[e
t
,a
t
],m1为t
a0
+δt时刻j2000坐标系到平台坐标变换矩阵。
[0043]
设
[0044][0045]
可得
[0046][0047]
本技术能够使得恒星保持在望远镜视场范围内,实现恒星稳像的目的。恒星引导跟踪时,需要利用平台广播的姿态信息,预测在曝光时间内载荷在惯性空间的朝向,并计算转台双轴角度数据,使惯性空间的某个方向在光学镜头中的角坐标保持稳定。
附图说明
[0048]
图1为本发明星上恒星目标跟踪方法的流程图。
具体实施方式
[0049]
下面结合附图及具体实施例对本发明作进一步详细的说明。
[0050]
参阅图1所示,是本发明星上恒星目标跟踪方法较佳实施例的作业流程图。
[0051]
步骤s1,通过星上平台的平台姿态参数计算得到j2000坐标系和平台坐标系的坐标系变换矩阵。具体而言:
[0052]
星上平台可以通过平台姿态参数,所述平台姿态参数包括:船上时、惯性姿态四元数、惯性姿态运动角速度,获取平台坐标系在j2000坐标系下的变换矩阵。j2000坐标系到平台坐标系的坐标变换矩阵的计算方法如下:
[0053]
步骤s11,计算t
a0
时刻从j2000坐标系到平台坐标系的坐标变换矩阵a(t
a0
)。
[0054]
在船上时t
a0
时刻,对应平台惯性姿态四元数[q1,q2,q3,q4],因此,j2000到t
a0
时刻
平台坐标系的坐标变换矩阵如下:
[0055][0056]
步骤s12,计算时间间隔δt从j2000坐标系到平台坐标系姿态角增量对应的坐标变换矩阵b。
[0057]
在船上时t
a0
时刻对应的惯性姿态运动角速度矢量[ω
x0
,ω
y0
,ω
z0
]。设δt是从起始时刻至计算采样时刻的时长,经历δt后旋转角速度β如下:
[0058][0059]
计算旋转方向单位矢量ra:
[0060][0061]
姿态角增量对应的坐标变换矩阵b求解步骤如下:
[0062]
δb=β
×
δt
[0063][0064][0065]
步骤s13,计算得到从t
a0
到t
a0
+δt时刻j2000坐标系和平台坐标系的坐标变换矩阵m1:
[0066]
m1=a(t
a0
)
×
b。
[0067]
步骤s2,计算得到从平台坐标系到载荷坐标系的坐标系变换矩阵。
[0068]
具体而言:
[0069]
由于载荷安装、舱体对接、坐标轴方向定义差别等因素引起的系统误差,使得平台坐标系和载荷坐标系之间存在坐标系变换矩阵,表示为m2。通过地面处理获取的定标图像数据得到m2并上注。m2在定标后作为常量矩阵。
[0070]
标定m2的步骤包括:
[0071]
步骤s21,载荷坐标系按照俯仰运动、方位运动后与镜头坐标系平行。因此将转台置于零位时认为镜头坐标系与载荷坐标系重合。将转台置于零位时对已知恒星成像,查找星表获取恒星在j2000坐标系下坐标。通过下传图像得到该恒星在镜头坐标系下坐标,计算从j2000到镜头坐标系的坐标变换矩阵mz。
[0072]
步骤s22,根据拍摄图像时的姿态广播数据,计算在载荷的曝光时刻,从j2000坐标系到平台坐标系的坐标变换矩阵m
at
。
[0073]
步骤s23,计算m2。
[0074]
m2=m
zmat
。
[0075]
步骤s3,计算得到从载荷坐标系到镜头坐标系的坐标系变换矩阵。
[0076]
具体而言:
[0077]
载荷坐标系和镜头坐标系二者之间通过二维转台方位向、俯仰向依次旋转,使坐标轴相互平行。设初始时刻转台角度为[e0,a0],从载荷坐标系到镜头坐标系的坐标变换矩阵m
g0
为:
[0078][0079]
经过i段时间后,转台角度为[e
t
,a
t
],从载荷坐标系到镜头坐标系的坐标变换矩阵m
gt
为:
[0080][0081]
其中,g
t
为理论像旋角速度,下传至地面,作为地面处理的辅助信息。
[0082]
步骤s4,计算得到恒星引导跟踪时的转台角度。具体而言:
[0083]
步骤s41,设在曝光起始时刻t
a0
,转台角度为[e0,a0],从j2000坐标系到镜头坐标系的变换矩阵为:
[0084]mp0
=m
g0
m2a(t
a0
)
[0085]
上式中,m
g0
参数为转台角度[e0,a0],a(t
a0
)为t
a0
时刻j2000坐标系到平台坐标系变换矩阵。
[0086]
步骤s42,计算t
a0
+δt时刻,从j2000坐标系到镜头坐标系的变换矩阵为:
[0087]mp
=m
gt
m2m1[0088]
上式中,m
gt
参数为转台角度[e
t
,a
t
],m1为t
a0
+δt时刻j2000坐标系到平台坐标变换矩阵。
[0089]
设
[0090][0091]
可得
[0092]at
=arcsin(q
31
)
[0093][0094][0095]
步骤s5,根据计算得到的恒星引导跟踪时的转台角度,对恒星进行稳像跟踪。
[0096]
本技术采用开环引导跟踪算法实现恒星目标。根据平台提供的姿态数据,预测一
段时间后平台姿态。采用方位、俯仰双轴稳像设计,通过转台方位轴、俯仰轴角度变化,实现望远镜光轴指向固定、视场稳像功能。
[0097]
虽然本发明参照当前的较佳实施方式进行了描述,但本领域的技术人员应能理解,上述较佳实施方式仅用来说明本发明,并非用来限定本发明的保护范围,任何在本发明的精神和原则范围之内,所做的任何修饰、等效替换、改进等,均应包含在本发明的权利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1