一种基于车路协同技术下车辆闯红灯预警方法与流程
[0001]
本发明属于道路管理技术领域,具体为一种基于车路协同技术下车辆闯红灯预警方法。
背景技术:
[0002]
车路协同是采用先进的无线通信和新一代互联网等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统。
[0003]
但是常见的预警方法在使用时,不能及时的对车辆进行预警提示,从而会引发危险,同时常见的闯红灯概率计算不够精确。
技术实现要素:
[0004]
本发明的目的在于:为了解决上述提出的问题,提供一种基于车路协同技术下车辆闯红灯预警方法。
[0005]
本发明采用的技术方案如下:一种基于车路协同技术下车辆闯红灯预警方法,所述基于车路协同技术下车辆闯红灯预警方法包括以下步骤:
[0006]
s1:先通过车路协同获得道路上的各种数据,比如绿灯时间,车流的速度等;
[0007]
s2:对道路上的各个车辆进行闯红灯概率实时计算;
[0008]
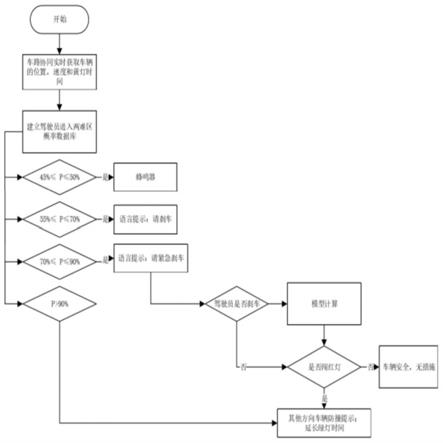
s3:通过车辆闯红灯概率对车辆进行不同程度的预警,车辆减速或者急减速给出减速提示,就提示同车道的跟车车辆减速;
[0009]
s4:当闯红灯概率大于90%时,会取“绿灯延时+预警”模式,多余的一定绿灯时间使闯红灯车辆以一定速度通过交叉口,不会发生碰撞与其他车辆,还可以使其余的车辆看到车辆减速预警,也进行相应的减速,避免了交通事故的发生。
[0010]
在一优选的实施方式中,所述步骤s1中对车路协同技术国内外研究现状以及其发展趋势的分析,车路协同需要通过多途径获取数据信息,包括车辆自身状态、周围行车环境、路面状态、交通流等信息;同时,通过精准的定位与可靠的通信技术将这些数据信息传输到云服务器,以便云服务器对这些信息进行处理,形成有效的控制指挥方案,并将方案发布出去。所以,将车路协同相关技术总结为信息采集技术、通信技术、信息处理技术,这些功能分别由交通信息传感器、通信网络、云服务中心来实现。
[0011]
在一优选的实施方式中,所述云服务中心在车路协同系统中主要用于预测道路交通姿态、大规模车辆诱导、车辆调度等;云服务中心系统由感知层、中间件、服务层及应用层组成;感知层由信息采集设备、信息处理分析设备、信息传输转换设备、信息发布设备构成;中间件由系统安全管理软件、数据库管理软件、信息处理分析软件及系统服务应用软件等构成,服务层由人与云服务中心(p2c)、车与云服务中心(v2c)、道路设施与云服务中心t2c、环境与云服务中心(e2c)、交通与云服务中心t2c五大云服务系统与云服务总中心连接构
成,具有标准统一、信息共享的特点,并且具有良好的系统兼容性;应用层是智能交通系统为了满足交通服务对象的交通需求而开发的应用服务系统层。
[0012]
在一优选的实施方式中,所述步骤s2中,在对车辆的闯红灯概率进行计算时,对抓拍图像进行了边缘检测是指图像中像素灰度有阶跃变化或屋顶状变化的那些像素的集合;两个具有不同灰度值的相邻区域之间总存在边缘;它对图像识别和分析十分有用;边缘能勾画出目标物体轮廓,使观察者一目了然,包含了丰富的信息(如方向、阶跃性质、形状等),是图像识别中抽取的重要属性;边缘粗略分为阶跃状和屋顶状两种;阶跃状边缘位于其两边的像素灰度值有明显不同的地方;屋顶状边缘位于灰度值从增加到减少的转折处;边缘灰度值的这种不连续性利用求导数便可以方便的检测到。
[0013]
在一优选的实施方式中,所述步骤s4中,在对图像采用了边缘检测进行处理之后,此时需要用到边缘追踪技术,在实际的应用中,由于获取图像时噪声、光照等因素的影响,用上面各种算子得到的边缘像素常常是孤立的或者是分小段连续的,很少能完整的描绘一条边缘;为了将检测到的边缘像素组合成一条有意义的闭合的边界,通常在使用了边缘检测算法后紧接着使用边缘跟踪的方法将边缘像素连接起来;边缘像素连接的基础是它们之间有一定的相似性;用梯度算子对图像进行处理可以得到像素两方面的性质。
[0014]
在一优选的实施方式中,在对图像采用了边缘检测时梯度的方向根据边缘像素在这两方面的相似性就可将它们连接起来;连接边缘点具体的操作方法就是∶分析图像中每个点低y的一个给定的小的邻域(如3
×
3或5
×
5)内像素的特点,如果像素的邻域内且它们的梯度幅值和梯度方向分别满足以下两个条件(其中t是幅度阈值,a是角度阈值)∶vf(x,y)-vf(s,)≤t,(2.29),或(x,y)-a(s,i)≤a(2.30),那么就可以将像素s0和像素xy连接起来;如果所有边缘像素都进行这样的操作,那么就有可能得到希望的闭合的边界。
[0015]
在一优选的实施方式中,所述闯红灯概率计算模块内部采用单片机的p2.1、p2.2、p2.3、p2.4、p2.5、p2.6口直接和交通灯连接,po口以及p1.0、p1.1口通过respack排阻与led数码管相连;控制程序放在89c51单片机中,在十字路口的四组红、黄、绿交通灯中,由单片机的p2.1、p2.2、p2.3、p2.4、p2.5、p2.6口控制,由于交通灯为发光二极管且阳极通过限流电阻和电源正极连接,因此1/0口输出低电平时,与之相连的相应指示灯会亮,并通过led数码管显示时间倒计时。
[0016]
在一优选的实施方式中,所述单片机i/0输出高电平时,相应指示灯会灭;紧急车请求通过的信号由人工控制,以中断方式输入单片机;无紧急车通过时,p3.1口通过电阻和电源正极连接为高电平,不产生中断,单片机执行主程序,有紧急车通过时,p3.1口采用人工方法接地为低电平,产生中断请求,单片机执行中断服务程序,让紧急车通过,紧急车通过后,p3.1口变为高电平,返回主程序。
[0017]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0018]
1、本发明中,通过不同程度的预警,使车辆减速给出减速提示,其余车辆也会减速,避免车辆闯红灯的记录,也避免了交通事故的可能,从而保障了人们在驾驶车辆时的安全性,给人们的日常生活带来了便利。
[0019]
2、本发明中,闯红灯概率计算模块的内部设置有边缘检测模块和边缘追踪技术,从而提高了对车辆进行抓怕时的清晰度,从而提高了计算闯红灯概率时的准确度,从而提高了该系统的检测时的精确性。
附图说明
[0020]
图1为本发明的车辆闯红灯预警三阶段流程图;
[0021]
图2为本发明中绿灯延时+预警模式流程图。
具体实施方式
[0022]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0023]
参照图1-2,
[0024]
一种基于车路协同技术下车辆闯红灯预警方法,所述基于车路协同技术下车辆闯红灯预警方法包括以下步骤:
[0025]
s1:先通过车路协同获得道路上的各种数据,比如绿灯时间,车流的速度等,步骤s1中对车路协同技术国内外研究现状以及其发展趋势的分析,车路协同需要通过多途径获取数据信息,包括车辆自身状态、周围行车环境、路面状态、交通流等信息;同时,通过精准的定位与可靠的通信技术将这些数据信息传输到云服务器,以便云服务器对这些信息进行处理,形成有效的控制指挥方案,并将方案发布出去。所以,将车路协同相关技术总结为信息采集技术、通信技术、信息处理技术,这些功能分别由交通信息传感器、通信网络、云服务中心来实现;云服务中心在车路协同系统中主要用于预测道路交通姿态、大规模车辆诱导、车辆调度等;云服务中心系统由感知层、中间件、服务层及应用层组成;感知层由信息采集设备、信息处理分析设备、信息传输转换设备、信息发布设备构成;中间件由系统安全管理软件、数据库管理软件、信息处理分析软件及系统服务应用软件等构成,服务层由人与云服务中心(p2c)、车与云服务中心(v2c)、道路设施与云服务中心t2c、环境与云服务中心(e2c)、交通与云服务中心t2c五大云服务系统与云服务总中心连接构成,具有标准统一、信息共享的特点,并且具有良好的系统兼容性;应用层是智能交通系统为了满足交通服务对象的交通需求而开发的应用服务系统层;
[0026]
s2:对道路上的各个车辆进行闯红灯概率实时计算,步骤s2中,在对车辆的闯红灯概率进行计算时,对抓拍图像进行了边缘检测是指图像中像素灰度有阶跃变化或屋顶状变化的那些像素的集合;两个具有不同灰度值的相邻区域之间总存在边缘;它对图像识别和分析十分有用;边缘能勾画出目标物体轮廓,使观察者一目了然,包含了丰富的信息(如方向、阶跃性质、形状等),是图像识别中抽取的重要属性;边缘粗略分为阶跃状和屋顶状两种;阶跃状边缘位于其两边的像素灰度值有明显不同的地方;屋顶状边缘位于灰度值从增加到减少的转折处;边缘灰度值的这种不连续性利用求导数便可以方便的检测到;
[0027]
s3:通过车辆闯红灯概率对车辆进行不同程度的预警,车辆减速或者急减速给出减速提示,就提示同车道的跟车车辆减速,在对图像采用了边缘检测时梯度的方向根据边缘像素在这两方面的相似性就可将它们连接起来;连接边缘点具体的操作方法就是∶分析图像中每个点低y的一个给定的小的邻域(如3
×
3或5
×
5)内像素的特点,如果像素的邻域内且它们的梯度幅值和梯度方向分别满足以下两个条件(其中t是幅度阈值,a是角度阈值)∶vf(x,y)-vf(s,)≤t,(2.29),或(x,y)-a(s,i)≤a(2.30),那么就可以将像素s0和像素xy连接起来;如果所有边缘像素都进行这样的操作,那么就有可能得到希望的闭合的边界,单
片机i/0输出高电平时,相应指示灯会灭;紧急车请求通过的信号由人工控制,以中断方式输入单片机;无紧急车通过时,p3.1口通过电阻和电源正极连接为高电平,不产生中断,单片机执行主程序,有紧急车通过时,p3.1口采用人工方法接地为低电平,产生中断请求,单片机执行中断服务程序,让紧急车通过,紧急车通过后,p3.1口变为高电平,返回主程序。
[0028]
s4:当闯红灯概率大于90%时,会取“绿灯延时+预警”模式,多余的一定绿灯时间使闯红灯车辆以一定速度通过交叉口,不会发生碰撞与其他车辆,还可以使其余的车辆看到车辆减速预警,也进行相应的减速,避免了交通事故的发生,步骤s4中,在对图像采用了边缘检测进行处理之后,此时需要用到边缘追踪技术,在实际的应用中,由于获取图像时噪声、光照等因素的影响,用上面各种算子得到的边缘像素常常是孤立的或者是分小段连续的,很少能完整的描绘一条边缘;为了将检测到的边缘像素组合成一条有意义的闭合的边界,通常在使用了边缘检测算法后紧接着使用边缘跟踪的方法将边缘像素连接起来;边缘像素连接的基础是它们之间有一定的相似性;用梯度算子对图像进行处理可以得到像素两方面的性质,在对图像采用了边缘检测时梯度的方向根据边缘像素在这两方面的相似性就可将它们连接起来;连接边缘点具体的操作方法就是∶分析图像中每个点低y的一个给定的小的邻域(如3
×
3或5
×
5)内像素的特点,如果像素的邻域内且它们的梯度幅值和梯度方向分别满足以下两个条件(其中t是幅度阈值,a是角度阈值)∶vf(x,y)-vf(s,)≤t,(2.29),或(x,y)-a(s,i)≤a(2.30),那么就可以将像素s0和像素xy连接起来;如果所有边缘像素都进行这样的操作,那么就有可能得到希望的闭合的边界。
[0029]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1