公路与轨道交通交叉口用超限智能检测装置的制作方法
1.本实用新型属于智能检测技术领域,尤其涉及一种公路与轨道交通交叉道口用超限智能检测装置。
背景技术:
2.随着城市化进程的不断推进,人们的交通出行方式发生了日新月异的变化。从以前的轿车、公交到现在的地铁、高铁,而有轨电车作为一种新型的城市轨道交通在近几年逐步进入人们的日常生活。它以安全高效、绿色环保著称,具有建设难度低、车道共用的特点;同时兼顾着城市观光旅游的任务成为城市建设的一道亮丽风景线。
3.然而有轨电车的正常行驶却时时刻刻受到外在因素的威胁,比如高度超限车辆刮损、破坏取电电缆(接触线),重要定位点处线缆从线夹中脱落等。部分轨道交通(主要指有轨电车)线路与公路为共有路权,交通道路间存在平面交叉情况,轨道交通供电方式使用接触网供电,多次发生道口超高车辆剐蹭接触网事故,严重剐蹭会导致接触网断线或者人身伤害事故,造成轨道交通客运车辆停止运行,给轨道交通运行安全造成极大影响。如何及时发现发生或即将发生的威胁并及时预警成为研究的重点。
技术实现要素:
4.为了解决现有技术中的难题,本实用新型提出了一种公路与轨道交通交叉道口用超限智能检测装置及其检测方法。
5.本实用新型的目的通过以下技术方案来实现:
6.公路与轨道交通交叉道口用超限智能检测装置,所述装置置于铁路公路共有权区域,包括垂直于地面的两组立柱,所述立柱上设置有超限检测机构,每侧立柱之间设置有接触网的支柱,所述立柱与所述支柱之间的距离大于电车宽度,每个所述支柱上设置有监控单元,所述监控单元包括接触网监控单元、道口全景监控单元。
7.优选地,所述超限检测机构为红外光栅检测单元,所述红外光栅检测单元包括设置于一侧立柱上的红外光栅发射单元及设置于对应侧立柱上的红外光栅接收单元。
8.优选地,所述红外光栅检测单元包括预检测红外光栅单元及设置于所述预检测红外光栅单元上方的超限检测红外光栅单元。
9.优选地,其中一侧的支柱上还设置有与所述超限检测机构和所述监控单元电性连接的通讯控制单元。
10.优选地,所述接触网监控单元设置于所述道口全景监控单元上方。
11.优选地,所述接触网监控单元包括定位点检测相机,所述定位点检测相机设置有两个,分别设置于支柱两侧。
12.优选地,所述道口全景监控单元包括全景监控相机及设置于所述全景监控相机上方的车牌号检测相机,所述车牌号检测相机设置于立柱的两侧。
13.优选地,以上任意一项所述的公路与轨道交通交叉道口用超限智能检测装置的检
测方法,包括如下步骤,
14.s1、超限检测单元对经过的车辆进行超限检测;并将是否超限的信号传输至通讯控制单元;
15.s2、若超限,通讯控制单元将发送信号至监控单元,所述监控单元对超限车辆进行图片抓取及短视频的录制,并将其发送至云服务器,所述云服务器将相应的信息推送至客户端以供人员及时了解实时状态。
16.优选地,所述s2中图片抓取包括如下步骤,
17.s21、通过车牌号检测相机对车辆的车牌检测确认是否为车牌;
18.s22、通过图像处理对确认的车牌进行斜度矫正;若为歪斜,则进行一次仿射变换矫正,若为偏斜,则进行两次仿射变换矫正;
19.s23、对矫正后的正视角车牌进行字符定位分割,通过hsv颜色模型根据像素值和颜色表的对比确定车牌颜色,利用二值化提取车牌字符;并利用取轮廓操作去提取车牌像素连通区域的外围轮廓,进而用外接矩形限制轮廓边界然后进行分割截取图块;
20.s24、利用神经网络模型训练单个标注切割好的身份、数字、字母的字符,得到网络模型,利用模型进行预测,最后分别的预测结果进行拼接输出进行车牌识别;
21.s25、利用训练得到的网络模型,预测测试抓拍的车辆车牌识别验证。
22.本实用新型的有益效果体现在:本实用新型中的装置可以自动判断超限侵限,并采集相关视频信息,获取超限车牌,识别接触网状态,将相关数据实时传输接触网运维中心,方便快捷的为运维人员判断肇事车辆是否对运营造成危害提供判断依据,能够及时快速的响应处理相关故障。
附图说明
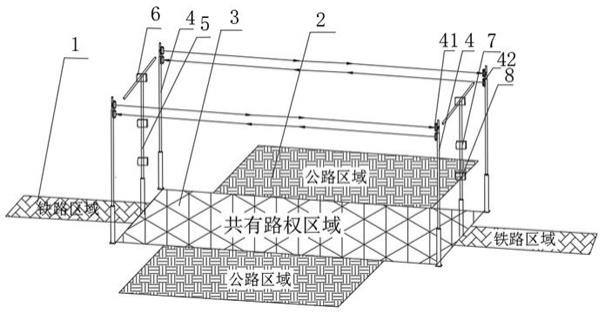
23.图1:本实用新型的连接结构示意图。
24.图2:本实用新型通讯控制单元结构示意图。
25.图3:本实用新型中的监控单元结构示意图。
26.其中,1铁路区域,2公路区域,3铁路公路共有权区域,4立柱,41超限检测红外光栅单元,42预检测红外光栅单元, 5支柱,51控制箱体,52散热孔,6接触网监控单元,62车牌号检测相机,63全景监控相机,64连杆,7道口全景监控单元,8通讯控制单元,。
具体实施方式
27.以下结合实施例具体阐述本实用新型的技术方案,本实用新型揭示了一种公路与轨道交通交叉道口用超限智能检测装置,结合图1
‑
图3所示,本装置设置于公路区域2和铁路区域1的共有区,即铁路公路共有权区域3内。
28.包括垂直于地面的两组立柱4,每侧立柱之间设置有接触网的支柱5,为了电车顺利通过,所述立柱4与所述支柱5之间的距离大于电车宽度。每个所述立柱4上设置有超限检测机构,本实施例中,所述超限检测机构为红外光栅检测单元,所述红外光栅检测单元包括设置于一侧立柱上的红外光栅发射单元及设置于对应侧立柱上的红外光栅接收单元。为确保检测的准确性,本实施例中每个立柱4上设置有两个红外光栅检测单元,包括预检测红外光栅单元42及设置于所述预检测红外光栅单元42上方的超限检测红外光栅单元41,分别进
行预检测和超限检测。
29.每个所述支柱5上设置有监控单元,所述监控单元包括接触网监控单元6、及设置于所述接触网监控单元6下方的道口全景监控单元7。其中一侧的支柱上还设置有与所述超限检测机构和所述监控单元电性连接的通讯控制单元8。所述通讯控制单元8设置于控制箱体51内,所述控制箱体51上开设有散热孔52。所述通讯控制单元8与机房内的监控中心连接。监控中心用于接收现场各站点发送过来的数据,包括超限车辆车牌号、车辆或物体高度、通过的时间、接触线定位点状态图像、道口全景短视频,保存到数据库,为客户端软件提供数据支持;转发移动客户端操作发送来的命令到现场监测软件。实现客户移动端与现场的实时通讯连接。
30.具体的,所述接触网监控单元6用于监控接触线定位处的状态,包括定位点检测相机,所述定位点检测相机设置有两个,分别设置于支柱两侧。本实施例中,所述定位点检测相机采用内置红外夜视补光灯的高清半球摄像机。
31.所述道口全景监控单元7包括通过连杆64设置于支柱上的全景监控相机63及设置于所述全景监控相机上方的车牌号检测相机62,所述车牌号检测相机62设置于立柱5的两侧。所述车牌号检测相机62采用高分辨率高清车牌检测相机加红外led光源组成,内置智能识别相机组件识别车牌及其他超限物体外轮廓特征,红外led补光灯兼顾白昼状态下也能够清楚拍摄。
32.本实用新型还揭示了以上任意一项所述的公路与轨道交通交叉道口用超限智能检测装置的检测方法,包括如下步骤,
33.s1、超限检测单元对经过的车辆进行超限检测;并将是否超限的信号传输至通讯控制单元;
34.s2、若超限,通讯控制单元将发送信号至监控单元,所述监控单元对超限车辆进行图片抓取及短视频的录制,并将其发送至云服务器,所述云服务器将相应的信息推送至客户端以供人员及时了解实时状态。
35.本实用新型还揭示了对接触网定位点状态的检测,从不同定位点的相机数据采集、到roi感兴趣区域选择,通过尺度归一化处理,输入到svm线性预测模型进行预测,最后输出预测结果。由于线缆异常状态图像很难采集,所以直接训练异常状态变得不可能。正常线缆只要发生脱落,那么roi区域将完全(或部分)没有线缆,成为只包含背景图像。所以本实用新型中采用正常线缆的roi区域作为正样本,同时从相机原始图像中随机选择背景roi区域作为副样本。正副样本输入到svm机器学习模型中进行迭代训练,训练的模型可对待测图片进行线性划分、评估打分预测。分值越高代表线缆正常可能性越大,分值越低线缆异常可能性越大。
36.所述s2中图片抓取包括如下步骤,
37.s21、通过车牌号检测相机对车辆的车牌检测确认是否为车牌;具体的,先通过定位车牌的大体范围,然后通过svm模型进行预测,通过相应的转换将低维数据映射为高维的数据进行预测。
38.s22、通过图像处理对确认的车牌进行斜度矫正;若为歪斜,则进行一次仿射变换矫正,若为偏斜,则进行两次仿射变换矫正;
39.s23、对矫正后的正视角车牌进行字符定位分割,通过hsv颜色模型根据像素值和
颜色表的对比确定车牌颜色,利用二值化提取车牌字符;并利用取轮廓操作去提取车牌像素连通区域的外围轮廓,进而用外接矩形限制轮廓边界然后进行分割截取图块;
40.s24、利用神经网络模型训练单个标注切割好的身份、数字、字母的字符,得到网络模型,利用模型进行预测,最后分别的预测结果进行拼接输出进行车牌识别;
41.s25、利用训练得到的网络模型,预测测试抓拍的车辆车牌识别验证。
42.当然本实用新型尚有多种具体的实施方式,在此就不一一列举。凡采用等同替换或者等效变换而形成的所有技术方案,均落在本实用新型要求保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1