一种可降低误报率的机坪安全预警方法及系统与流程
1.本发明属于航空技术领域,尤其涉及一种可降低误报率的机坪安全预警方法及系统。
背景技术:
2.安全是民航的根本,而停机坪是飞行器地面所处最复杂的工作环境,是威胁飞行器安全的关键区域。随着近几年来民航机场机坪管制移交工作的开展落实,机坪管制与放行工作已成为机场运控管理部门的重要日常工作。
3.专利申请号为cn201911335141.8公开的民航机场机坪场面监视与电子进程协同交互的实现方法,该方法通过信息化的手段,将传统机坪场面监视与新兴的机坪电子进程管控有机联动,实现场面监视系统操作结果实时同步到电子进程管控系统中的电子进程单上展示,电子进程管控系统为场面监视系统提供必要的智能监视相关的数据,增加交互管制体验,使协调席、管制席工作具有协作性,增强管制指挥的场景感、画面感,从根本上减轻管制员工作量,优化工作历程,提升管制效率,机坪场面监视系统还能量化数据,综合分析后将各类预警推送给电子进程单系统在界面层面的预警信息呈现,通过各类告警更有效的保障航空器安全推出、入位以及规避滑行过程中的安全隐患。但是现有的机坪管制与放行工作主要通过塔台的工作人员完成,还是需要同时兼顾机坪地面的管控和对起飞、降落飞机机坪的分配,塔台的工作人员工作量较大,一旦发生警报误报的情况,导致航空器在安全推出、入位以及规避滑行过程中的安全隐患都会受到影响,因此亟需一种能够提高停机坪安全性的方法,降低机坪安全告警设备的误报频率,减轻塔台工作人员的工作负担。
技术实现要素:
4.有鉴于此,本发明提供了一种可降低误报率的机坪安全预警方法及系统,以解决现有技术中因停机坪安全性差导致机坪安全告警设备的误报频率高,进而使塔台工作人员的工作负担重的问题。
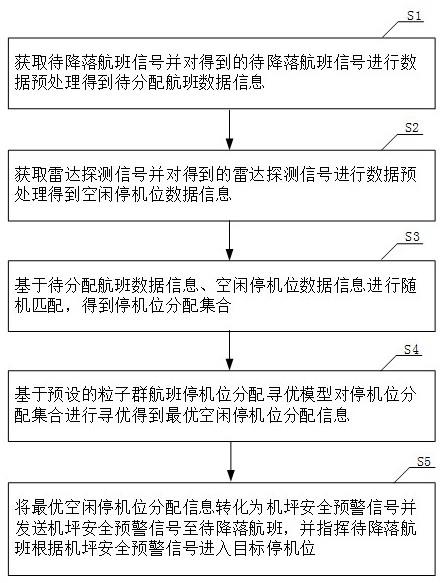
5.本发明实施例的第一方面提供了一种可降低误报率的机坪安全预警方法,该方法包括:s1:获取待降落航班信号并对得到的待降落航班信号进行数据预处理得到待分配航班数据信息;s2:获取雷达探测信号并对得到的雷达探测信号进行数据预处理得到空闲停机位数据信息;s3:基于待分配航班数据信息、空闲停机位数据信息进行随机匹配,得到停机位分配集合x=[x1,x2,...xm];其中,各停机位分配结果为xm=[x
m1
,x
m2
,...x
mj
];s4:基于预设的粒子群航班停机位分配寻优模型对停机位分配集合进行寻优得到最优空闲停机位分配信息;s5:将最优空闲停机位分配信息转化为机坪安全预警信号并发送机坪安全预警信
号至待降落航班,并指挥待降落航班根据机坪安全预警信号进入目标停机位。
[0006]
可选的,基于待分配航班数据信息、空闲停机位数据信息进行随机匹配,得到停机位分配集合的步骤包括:s31:基于筛选条件对待分配航班数据信息、空闲停机位数据信息进行随机匹配,得到停机位预分配集合;其中,停机位预分配集合包括:待分配航班总数量、各个待分配航班的权值系数、各个待分配航班的到港时间、各个待分配航班的离港时间、各个待分配航班到港乘客数量、各个待分配航班离港乘客数量、航班燃油单价、航班单位时间滑行油耗、航班的预设滑行速度,空闲停机位总数量、各个空闲停机位的编号、各个空闲停机位的类型、各个空闲停机位到港乘客通行距离、各个空闲停机位离港乘客通行距离、各个空闲停机位到第一跑道出口的距离、各个空闲停机位到第二跑道入口的距离、各个空闲停机位的匹配信息;s32:获取历史停机位分配集合并与停机位预分配集合重新组合得到停机位分配集合;其中,历史停机位分配集合包括:各个历史停机位总数量、各个历史停机位的编号、各个历史停机位的类型、各个历史停机位到港乘客通行距离、各个历史停机位离港通行距离、各个历史停机位的航班的离港时间、各个历史停机位到第一跑道出口的距离、各个历史停机位到第二跑道入口的距离以及各个历史停机位的匹配信息。
[0007]
可选的,在基于筛选条件对待分配航班数据信息、空闲停机位数据信息进行随机匹配,得到停机位预分配集合之前,还包括待分配航班数据信息的预处理过程,待分配航班数据信息的预处理过程包括:判断空闲停机位总数量是否不小于待分配航班总数量,若空闲停机位总数量不小于待分配航班总数量,则输出待分配航班数据信息,若空闲停机位总数量小于待分配航班总数量,则依次删除到港时间最晚的航班直至空闲停机位总数量等于待分配航班总数量,并输出预处理后的待分配航班数据信息。
[0008]
可选的,获取历史停机位分配集合与停机位预分配集合重新组合得到停机位分配集合包括:基于各个空闲停机位的匹配信息和各个历史停机位的匹配信息确定各个停机位的匹配信息;基于各个待分配航班的到港时间、各个待分配航班的离港时间、各个历史停机位的航班的离港时间以及各个停机位的匹配信息确定各个相邻停机位的冲突类型。
[0009]
可选的,筛选条件为:其中,当x
il
=1时,表示第i个航班被分配到第l个停机位,当x
il
=0时,表示第i个航班未被分配到第l个停机位,当t
l
=3时,表示第l个停机位是大型停机位,当t
l
=2时,表示第l个停机位是中型停机位,当t
l
=1时,表示第l个停机位是小型停机位,当hi=3时,表示第i个航班是大型航班,当hi=2时,表示第i个航班是中型航班,当hi=1时,表示第i个航班是小型航班。
[0010]
可选的,基于预设的粒子群航班停机位分配寻优模型对停机位分配集合进行寻优
的步骤包括:s41:初始化粒子的位置和速度,并设定个体学习因子c1、群体学习因子c2以及迭代次数t=0;s42:计算各个粒子的适应值;s43:寻找个体粒子极值和群体粒子极值;s44:更新各个粒子的速度和位置;s45:计算更新后的各个粒子的适应值;s46:更新个体粒子极值和群体粒子极值;s47:令t=t+1,若t大于预设迭代次数、或粒子达到最优粒子,则以最优粒子作为最优空闲停机位分配信息,若t不大于预设迭代次数且粒子未达到最优粒子,则返回执行步骤s44。
[0011]
可选的,各个粒子的适应值的计算方法为:其中,ym(t+1)为在第t+1次迭代时第m个粒子的适应值,p1为第一预设常数,r为所述待分配航班总数量,f为所有航班总数量,g为停机位总数量,c为航班燃油单价,h为航班单位时间滑行油耗,ξi为第i个待分配航班的权值系数,d
l1
为第一跑道出口滑行至第l个停机位的距离,v为航班的预设滑行速度,ξj为第j个航班的权值系数;当x
jl
=1时,表示第j个航班被分配到第l个停机位,当x
jl
=0时,表示第j个航班未被分配到第l个停机位;d
l2
为第l个停机位滑行至第二跑道入口的距离,p2为第二预设常数,n
ja
为第j个航班到港乘客数量,n
jd
为第j个航班离港乘客数量,d
la
为第l个停机位到港乘客通行距离,d
ld
为第l个停机位离港乘客通行距离;当η
k1k2
=1时,表示第k1个停机位的航班与第k2个停机位的航班相邻;当η
k1k2
=0时,表示第k1个停机位的航班与第k2个停机位的航班不相邻;当x
1k1
x
1k2
=1时,表示第k1个停机位的航班与第k2个停机位的航班发生双推出冲突;当x
1k1
x
1k2
=0时,表示第k1个停机位的航班与第k2个停机位的航班未发生双推出冲突;当x
2k1
x
2k2
=1时,表示第k1个停机位的航班与第k2个停机位的航班发生双滑入冲突;当x
2k1
x
2k2
=0时,表示第k1个停机位的航班与第k2个停机位的航班未发生双滑入冲突;当x
3k1
x
3k2
=1时,表示第k1个停机位的航班与第k2个停机位的航班发生推出滑入冲突;当x
3k1
x
3k2
=0时,表示第k1个停机位的航班与第k2个停机位的航班未发生推出滑入冲突;
t
k1in
为第k1个停机位的航班的到港时间,t
k1out
为第k1个停机位的航班的离港时间,t
k2in
为第k2个停机位的航班的到港时间,t
k2out
为第k2个停机位的航班的离港时间。
[0012]
可选的,更新各个粒子的速度和位置,包括:更新粒子速度的计算方法:其中,v
mjt+1
为在第t+1次迭代时第m个粒子的速度,ω为惯性权重,v
mjt
为在第t次迭代时第m个粒子的速度,r1和r2均为0~1之间的随机数,p
tmj
在第t次迭代时第m个粒子的个体粒子极值,x
tmj
在第t次迭代时第m个粒子的位置,p
tgj
在第t次迭代时第m个粒子的群体粒子极值;更新粒子位置的计算方法:其中,x
mjt+1
在第t+1次迭代时第m个粒子的位置。
[0013]
可选的,惯性权重的计算方法为:其中,ω
start
为初始时惯性权重,ω
end
为结束时惯性权重,t
max
为预设迭代次数。
[0014]
本发明实施例的第二方面提供了一种可降低误报率的机坪安全预警系统,该系统包括:飞机工作端、监管工作端、塔台工作端、塔台工作优化端以及控制器服务端;飞机工作端,用于获取待降落航班信号并对得到的待降落航班信号进行数据预处理得到待分配航班数据信息;监管工作端,用于获取雷达探测信号并对得到的雷达探测信号进行数据预处理得到空闲停机位数据信息;塔台工作端,用于基于待分配航班数据信息、空闲停机位数据信息进行随机匹配,得到停机位分配集合x=[x1,x2,...xm];其中,各停机位分配结果为xm=[x
m1
,x
m2
,...x
mj
];塔台工作优化端,用于基于预设的粒子群航班停机位分配寻优模型对停机位分配集合进行寻优得到最优空闲停机位分配信息;控制器服务端,用于将最优空闲停机位分配信息转化为机坪安全预警信号并发送机坪安全预警信号至待降落航班,并指挥待降落航班根据机坪安全预警信号进入目标停机位。
[0015]
本发明与现有技术相比存在的有益效果是:本发明提供了一种可降低误报率的机坪安全预警方法及系统,该方法包括获取待降落航班信号并对得到的待降落航班信号进行数据预处理得到待分配航班数据信息;获取雷达探测信号并对得到的雷达探测信号进行数据预处理得到空闲停机位数据信息;基于待分配航班数据信息、空闲停机位数据信息进行随机匹配,得到停机位分配集合x=[x1,x2,...xm];基于预设的粒子群航班停机位分配寻优模型对停机位分配集合进行寻优得到最优
空闲停机位分配信息;将最优空闲停机位分配信息转化为机坪安全预警信号并发送机坪安全预警信号至待降落航班,并指挥待降落航班根据机坪安全预警信号进入目标停机位。本发明能够解决现有技术中因停机坪安全性差导致机坪安全告警设备的误报频率高,进而使塔台工作人员的工作负担重的问题。
附图说明
[0016]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0017]
图1是本发明一实施例提供的一种可降低误报率的机坪安全预警方法的流程示意图;图2是本发明又一实施例提供的一种可降低误报率的机坪安全预警方法的流程示意图;图3是本发明一实施例提供的基于预设的粒子群航班停机位分配寻优模型的寻优流程示意图;图4是本发明一实施例提供的一种可降低误报率的机坪安全预警系统的结构框图。
具体实施方式
[0018]
以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本发明实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本发明。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本发明的描述。
[0019]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图通过具体实施例来进行说明。
[0020]
参见图1,发明实施例提供了一种可降低误报率的机坪安全预警方法,该方法包括:s1:获取待降落航班信号并对得到的待降落航班信号进行数据预处理得到待分配航班数据信息。
[0021]
可选的,在一些实施例中,待降落航班可以是机场全天到港的航班,并按照时间顺序对各个航班的待降落航班信号进行数据预处理,最终得到待分配航班数据信息。
[0022]
s2:获取雷达探测信号并对得到的雷达探测信号进行数据预处理得到空闲停机位数据信息。
[0023]
可选的,在一些实施例中,雷达探测器可以在时间最早的航班到港之前发送一次雷达探测信号,之后雷达探测器可以在时间最早的航班到达时再发送一次雷达探测信号以确保雷达探测信号进行数据预处理之前空闲停机位没有变化。
[0024]
s3:基于待分配航班数据信息、空闲停机位数据信息进行随机匹配,得到停机位分配集合x=[x1,x2,...xm]。其中,各停机位分配结果为xm=[x
m1
,x
m2
,...x
mj
]。
[0025]
s4:基于预设的粒子群航班停机位分配寻优模型对停机位分配集合进行寻优得到最优空闲停机位分配信息。
[0026]
可选的,在一些实施例中,最优空闲停机位分配信息为停机位分配集合中一次最优的停机位分配结果。
[0027]
s5:将最优空闲停机位分配信息转化为机坪安全预警信号并发送机坪安全预警信号至待降落航班,并指挥待降落航班根据机坪安全预警信号进入目标停机位。
[0028]
可选的,在一些实施例中,待降落航班根据机坪安全预警信号进入目标停机位,由于目标停机位为最优空闲停机位,最优空闲停机位触发机坪告警设备的几率低,从而降低了告警设备的误报率,实现机坪安全预警的目的。
[0029]
参见附图2,作为本发明实施例提供的可降低误报率的机坪安全预警方法的一种具体实施方式,基于待分配航班数据信息、空闲停机位数据信息进行随机匹配,得到停机位分配集合的步骤包括:s31:基于筛选条件对待分配航班数据信息、空闲停机位数据信息进行随机匹配,得到停机位预分配集合。
[0030]
其中,停机位预分配集合包括:待分配航班总数量、各个待分配航班的权值系数、各个待分配航班的到港时间、各个待分配航班的离港时间、各个待分配航班到港乘客数量、各个待分配航班离港乘客数量、航班燃油单价、航班单位时间滑行油耗、航班的预设滑行速度,空闲停机位总数量、各个空闲停机位的编号、各个空闲停机位的类型、各个空闲停机位到港乘客通行距离、各个空闲停机位离港乘客通行距离、各个空闲停机位到第一跑道出口的距离、各个空闲停机位到第二跑道入口的距离、各个空闲停机位的匹配信息。
[0031]
s32:获取历史停机位分配集合并与停机位预分配集合重新组合得到停机位分配集合。
[0032]
其中,历史停机位分配集合包括:各个历史停机位总数量、各个历史停机位的编号、各个历史停机位的类型、各个历史停机位到港乘客通行距离、各个历史停机位离港通行距离、各个历史停机位的航班的离港时间、各个历史停机位到第一跑道出口的距离、各个历史停机位到第二跑道入口的距离以及各个历史停机位的匹配信息。
[0033]
可选的,作为本发明实施例提供的可降低误报率的机坪安全预警方法的一种具体实施方式,在基于筛选条件对待分配航班数据信息、空闲停机位数据信息进行随机匹配,得到停机位预分配集合之前,还包括待分配航班数据信息的预处理过程,待分配航班数据信息的预处理过程包括:判断空闲停机位总数量是否不小于待分配航班总数量,若空闲停机位总数量不小于待分配航班总数量,则输出待分配航班数据信息,若空闲停机位总数量小于待分配航班总数量,则依次删除到港时间最晚的航班直至空闲停机位总数量等于待分配航班总数量,并输出预处理后的待分配航班数据信息。
[0034]
可选的,作为本发明实施例提供的可降低误报率的机坪安全预警方法的一种具体实施方式,获取历史停机位分配集合与停机位预分配集合重新组合得到停机位分配集合包括:基于各个空闲停机位的匹配信息和各个历史停机位的匹配信息确定各个停机位的匹配信息。
[0035]
基于各个待分配航班的到港时间、各个待分配航班的离港时间、各个历史停机位的航班的离港时间以及各个停机位的匹配信息确定各个相邻停机位的冲突类型。
[0036]
可选的,在一些实施例中,待降落航班的冲突类型包括,同一机位的滑入推出冲突、相邻机位的双滑入冲突、相邻机位的双推出冲突、相邻机位的推出滑入冲突。
[0037]
可选的,筛选条件为:其中,当x
il
=1时,表示第i个航班被分配到第l个停机位,当x
il
=0时,表示第i个航班未被分配到第l个停机位,当t
l
=3时,表示第l个停机位是大型停机位,当t
l
=2时,表示第l个停机位是中型停机位,当t
l
=1时,表示第l个停机位是小型停机位,当hi=3时,表示第i个航班是大型航班,当hi=2时,表示第i个航班是中型航班,当hi=1时,表示第i个航班是小型航班。
[0038]
参见附图3,作为本发明实施例提供的可降低误报率的机坪安全预警方法的一种具体实施方式,基于预设的粒子群航班停机位分配寻优模型对停机位分配集合进行优化的步骤包括:s41:初始化粒子的位置和速度,并设定个体学习因子c1、群体学习因子c2以及迭代次数t=0;s42:计算各个粒子的适应值;s43:寻找个体粒子极值和群体粒子极值;s44:更新各个粒子的速度和位置;s45:计算更新后的各个粒子的适应值;s46:更新个体粒子极值和群体粒子极值;s47:令t=t+1,若t大于预设迭代次数、或粒子达到最优粒子,则以最优粒子作为最优空闲停机位分配信息,若t不大于预设迭代次数且粒子未达到最优粒子,则返回执行步骤s44。
[0039]
可选的,在一些实施例中,个体学习因子c1可以取3.0,群体学习因子c2可以取3.0,预设迭代次数为500。
[0040]
可选的,作为本发明实施例提供的可降低误报率的机坪安全预警方法的一种具体实施方式,各个粒子的适应值的计算方法为:
其中,ym(t+1)为在第t+1次迭代时第m个粒子的适应值,p1为第一预设常数,r为所述待分配航班总数量,f为所有航班总数量,g为停机位总数量,c为航班燃油单价,h为航班单位时间滑行油耗,ξi为第i个待分配航班的权值系数,d
l1
为第一跑道出口滑行至第l个停机位的距离,v为航班的预设滑行速度,ξj为第j个航班的权值系数;当x
jl
=1时,表示第j个航班被分配到第l个停机位,当x
jl
=0时,表示第j个航班未被分配到第l个停机位;d
l2
为第l个停机位滑行至第二跑道入口的距离,p2为第二预设常数,n
ja
为第j个航班到港乘客数量,n
jd
为第j个航班离港乘客数量,d
la
为第l个停机位到港乘客通行距离,d
ld
为第l个停机位离港乘客通行距离;当η
k1k2
=1时,表示第k1个停机位的航班与第k2个停机位的航班相邻;当η
k1k2
=0时,表示第k1个停机位的航班与第k2个停机位的航班不相邻;当x
1k1
x
1k2
=1时,表示第k1个停机位的航班与第k2个停机位的航班发生双推出冲突;当x
1k1
x
1k2
=0时,表示第k1个停机位的航班与第k2个停机位的航班未发生双推出冲突;当x
2k1
x
2k2
=1时,表示第k1个停机位的航班与第k2个停机位的航班发生双滑入冲突;当x
2k1
x
2k2
=0时,表示第k1个停机位的航班与第k2个停机位的航班未发生双滑入冲突;当x
3k1
x
3k2
=1时,表示第k1个停机位的航班与第k2个停机位的航班发生推出滑入冲突;当x
3k1
x
3k2
=0时,表示第k1个停机位的航班与第k2个停机位的航班未发生推出滑入冲突;t
k1in
为第k1个停机位的航班的到港时间,t
k1out
为第k1个停机位的航班的离港时间,t
k2in
为第k2个停机位的航班的到港时间,t
k2out
为第k2个停机位的航班的离港时间。
[0041]
可选的,在一些实施例中,若第i个航班的类型为大型航班,则第i个航班的优先级为ξi=1,若第i个航班的类型为中型航班,则第i个航班的优先级为ξi=2,若第i个航班的类型为小型航班,则第i个航班的优先级为ξi=3。
[0042]
可选的,在一些实施例中,若第j个航班的类型为大型航班,则第j个航班的优先级为ξj=1,若第j个航班的类型为中型航班,则第j个航班的优先级为ξj=2,若第j个航班的类型为小型航班,则第j个航班的优先级为ξj=3。
[0043]
可选的,作为本发明实施例提供的可降低误报率的机坪安全预警方法的一种具体实施方式,更新各个粒子的速度和位置,包括:更新粒子速度的计算方法:其中,v
mjt+1
为在第t+1次迭代时第m个粒子的速度,ω为惯性权重,v
mjt
为在第t次迭代时第m个粒子的速度,r1和r2均为0~1之间的随机数,p
tmj
在第t次迭代时第m个粒子的个体粒子极值,x
tmj
在第t次迭代时第m个粒子的位置,p
tgj
在第t次迭代时第m个粒子的群体粒子极值;更新粒子位置的计算方法:其中,x
mjt+1
在第t+1次迭代时第m个粒子的位置。可选的,作为本发明实施例提供的
可降低误报率的机坪安全预警方法的一种具体实施方式,惯性权重的计算方法为:其中,ω
start
为初始时惯性权重,ω
end
为结束时惯性权重,t
max
为预设迭代次数。
[0044]
可选的,在一些实施例中,初始时惯性权重ω
start
可以取0.9,结束时惯性权重可以取0.4,迭代初期较大的惯性权重保持了较强的全局搜索能力,惯性权重随迭代次数递减,使有利于在迭代后期进行更精准的局部搜索。
[0045]
对应于上文实施例的可降低误报率的机坪安全预警方法,图4为本发明一实施例提供的一种可降低误报率的机坪安全预警系统的结构框图。为了便于说明,仅示出了与本发明实施例相关的部分。参见附图4,该可降低误报率的机坪安全预警系统10包括:飞机工作端11、监管工作端12、塔台工作端13、塔台工作优化端14以及控制器服务端15。
[0046]
飞机工作端11,用于获取待降落航班信号并对得到的待降落航班信号进行数据预处理得到待分配航班数据信息。
[0047]
监管工作端12,用于获取雷达探测信号并对得到的雷达探测信号进行数据预处理得到空闲停机位数据信息。
[0048]
塔台工作端13,用于基于待分配航班数据信息、空闲停机位数据信息进行随机匹配,得到停机位分配集合x=[x1,x2,...xm]。其中,各停机位分配结果为xm=[x
m1
,x
m2
,...x
mj
]。
[0049]
塔台工作优化端14,用于基于预设的粒子群航班停机位分配寻优模型对停机位分配集合进行寻优得到最优空闲停机位分配信息。
[0050]
控制器服务端15,用于将最优空闲停机位分配信息转化为机坪安全预警信号并发送机坪安全预警信号至待降落航班,并指挥待降落航班根据机坪安全预警信号进入目标停机位。
[0051]
本发明与现有技术相比存在的有益效果是:本发明提供了一种可降低误报率的机坪安全预警方法及系统,该方法包括获取待降落航班信号并对得到的待降落航班信号进行数据预处理得到待分配航班数据信息。获取雷达探测信号并对得到的雷达探测信号进行数据预处理得到空闲停机位数据信息。基于待分配航班数据信息、空闲停机位数据信息进行随机匹配,得到停机位分配集合x=[x1,x2,...xm]。基于预设的粒子群航班停机位分配寻优模型对停机位分配集合进行寻优得到最优空闲停机位分配信息。将最优空闲停机位分配信息转化为机坪安全预警信号并发送机坪安全预警信号至待降落航班,并指挥待降落航班根据机坪安全预警信号进入目标停机位。本发明能够解决现有技术中因停机坪安全性差导致机坪安全告警设备的误报频率高,进而使塔台工作人员的工作负担重的问题。
[0052]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1