一种输电线路施工紧线预警方法与流程
[0001]
本发明涉及输电线路施工技术领域,特别涉及一种输电线路施工紧线预警方法。
背景技术:
[0002]
架空输电线路是电力工业的大动脉,是电力系统的重要组成部分。输电线路导线在相邻杆塔间下垂形成弧形曲线,下垂幅度称为弧垂。弧垂大小与档距、高差、导线长度、导线重量、导线所受应力有关,气温、风、冰雪等自然因素亦对其产生影响。对架空输电线路进行弧垂的准确观测,并指导紧线作业直至达到目标弧垂,是确保施工质量的重要过程。
[0003]
紧线作业完成后,若导线的弧垂与目标值偏离过大,将给后续输电线路的运行带来诸多危害:若胡弧垂值太小,拉紧的导线应力大,若温度降低,导线会被强制进一步拉长甚至拉断。尤其在南方雨雪灾害气候条件下,杆塔容易发生倒伏风险:若弧垂值太大,对被跨越物安全距离不足,受到系统持续过电压、高气温和重负荷等多因素影响,导线会发生自摆动,从而造成导线间和导线相对杆塔之间发生放电;在大风台风等恶劣气候条件下,导线会发生超出其允许范围的摆动,造成导线相互鞭击损伤以及杆塔连接部分导线损坏断股。
技术实现要素:
[0004]
有鉴于现有技术存在的缺陷,本发明所要解决的技术问题是,提供一种输电线路施工紧线预警方法,旨在解决输电塔线路在紧线作业过程中,线路的弧垂与预设值偏离过大的问题。
[0005]
为实现上述目的,本发明提供一种输电线路施工紧线预警方法,所述方法包括如下步骤:
[0006]
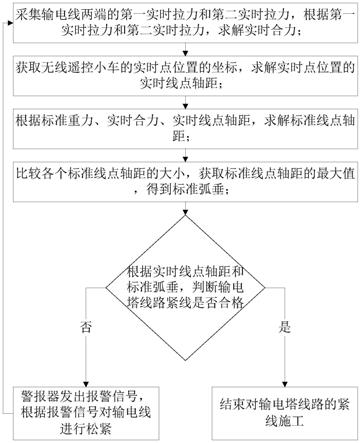
步骤s1、采集输电线两端的第一实时拉力和第二实时拉力根据所述第一实时拉力和所述第二实时拉力求解实时合力其中,所述实时合力其中,所述实时合力为所述输电线受到的风力;所述第一实时拉力和所述第二实时拉力包括大小和方向;所述输电线的两端分别架设于第一输电塔和第二输电塔,所述第一输电塔和所述第二输电塔为相邻的两输电塔,所述输电线与所述第一输电塔的第一连接点所在的高度为第一高度,所述输电线与所述第二输电塔的第二连接点所在的高度为第二高度,所述第一高度与所述第二高度相对于水平面的距离相等;以所述第一输电塔与所述输电线的连接处为坐标原点o、以所述第一输电塔所在的第一直线为z轴,以过所述第一连接点和所述第二连接点的第二直线为x轴,以过所述坐标原点o且同时垂直于所述第一直线和所述第二直线的第三直线为y轴建立空间直角坐标系;
[0007]
步骤s2、获取无线遥控小车的实时点位置的坐标(x,y,z),求解所述实时点位置的实时线点轴距a;其中,所述实时线点轴距所述无线遥控小车行走设置于所
述输电线上;所述线点轴距为所述无线遥控小车的所述实时点位置到所述第二直线的第一垂直距离;
[0008]
步骤s3、根据标准重力所述实时合力所述实时线点轴距a,求解标准线点轴距b;其中,所述标准线点轴距为:在无风状态下,所述输电线上各点到所述第二直线的第二垂直距离;所述标准线点轴距所述标准重力为预先求解值;
[0009]
步骤s4、比较各个所述标准线点轴距b的大小,获取所述标准线点轴距的最大值b
m
,得到所述输电线的标准弧垂f;其中,所述标准弧垂f的大小与所述标准线点轴距的最大值b
m
的大小相等,即f=b
m
;
[0010]
步骤s5、根据所述实时线点轴距a和所述标准弧垂f,判断输电塔线路紧线是否合格;当所述实时线点轴距的最大值a
m
不在弧垂的预设范围内时,则所述输电线紧线不合格,警报器发出报警信号,根据所述报警信号对所述输电线进行松紧并重复所述步骤s1。
[0011]
在该技术方案中,通过实时采集所述输电线两端的第一实时拉力和第二实时拉力求解实时合力通过获取所述无线遥控小车的所述实时点位置来求解所述实时线点轴距a;通过所述标准重力所述实时合力所述实时线点轴距a,求解所述标准线点轴距b并得到所述标准弧垂f;通过所述实时线点轴距a和所述标准弧垂f,来判断所述输电线紧线是否合格,进而准确的对所述输电线进行松紧,有效控制所述输电线的弧垂大小在预设范围内,有效减少所述输电线在后续运行中带来的危害。
[0012]
在一具体实施方式中,所述标准重力的预先求解方法为:
[0013]
在无风状态下,采集所述输电线两端的第一拉力和第二拉力根据所述第一拉力和所述第二拉力求解输电线的标准重力其中,所述标准重力
[0014]
在一具体实施方式中,所述弧垂的预设范围为[0.9f,1.1f]。
[0015]
在一具体实施方式中,所述步骤s5中所述报警信号包括:过紧信号,即所述实时线点轴距的所述最大值a
m
小于所述弧垂的预设范围的最小值0.9f;过松信号,即所述实时线点轴距的所述最大值a
m
大于所述弧垂的预设范围的最大值1.1f;
[0016]
对所述输电线进行松紧的标准为:当所述实时线点轴距的最大值a
m
<0.9f时,所述输电线紧线过紧,应当减小所述输电线两端的拉力并重复所述步骤s1;当所述实时线点轴距的最大值a
m
>1.1f时,所述输电线紧线不够,应当增大所述输电线两端的拉力并重复所述步骤s1。
[0017]
在一具体实施方式中,所述方法还包括:
[0018]
在所述步骤s1之前通过人眼观测所述输电线的紧线程度。
[0019]
在一具体实施方式中,所述无线遥控小车上设有用于对所述无线遥控小车位置信息的高精度定位探测头。
[0020]
在一具体实施方式中,所述无线遥控小车可在所述输电线上来回运动。
[0021]
在一具体实施方式中,所述无线遥控小车的所述实时点位置至少包括所述第一连接点或所述第二连接点其中的一点。
[0022]
本发明的有益效果是:在本发明中,通过实时采集所述输电线两端的第一实时拉力和第二实时拉力求解实时合力通过获取所述无线遥控小车的所述实时点位置来求解所述实时线点轴距a;通过所述标准重力所述实时合力所述实时线点轴距a,求解所述标准线点轴距b并得到所述标准弧垂f;通过所述实时线点轴距a和所述标准弧垂f,来判断所述输电线紧线是否合格,进而准确的对所述输电线进行松紧,有效控制所述输电线的弧垂大小在预设范围内,有效减少所述输电线在后续运行中带来的危害;还可用于在施工现场对已经完成紧线作业的输电线的弧垂进行更精细化的复测。
附图说明
[0023]
图1为本发明一具体实施方式中一种输电线路施工紧线预警方法的流程框图;
[0024]
图2为本发明一具体实施方式中输电线与输电塔的位置关系及输电线的受力示意图。
具体实施方式
[0025]
下面结合附图和实施例对本发明作进一步说明:
[0026]
如图1-2所示,在本发明的具体实施例中,提供一种输电线路施工紧线预警方法,所述方法包括如下步骤:
[0027]
步骤s1、采集输电线两端的第一实时拉力和第二实时拉力根据所述第一实时拉力和所述第二实时拉力求解实时合力其中,所述实时合力为所述输电线受到的风力;所述第一实时拉力和所述第二实时拉力包括大小和方向;所述输电线的两端分别架设于第一输电塔和第二输电塔,所述第一输电塔和所述第二输电塔为相邻的两输电塔,所述输电线与所述第一输电塔的第一连接点所在的高度为第一高度,所述输电线与所述第二输电塔的第二连接点所在的高度为第二高度,所述第一高度与所述第二高度相对于水平面的距离相等;以所述第一输电塔与所述输电线的连接处为坐标原点o、以所述第一输电塔所在的第一直线为z轴,以过所述第一连接点和所述第二连接点的第二直线为x轴,以过所述坐标原点o且同时垂直于所述第一直线和所述第二直线的第三直线为y轴建立空间直角坐标系;
[0028]
步骤s2、获取无线遥控小车的实时点位置的坐标(x,y,z),求解所述实时点位置的实时线点轴距a;其中,所述实时线点轴距所述无线遥控小车行走设置于所
述输电线上;所述线点轴距为所述无线遥控小车的所述实时点位置到所述第二直线的第一垂直距离;
[0029]
步骤s3、根据标准重力所述实时合力所述实时线点轴距a,求解标准线点轴距b;其中,所述标准线点轴距为:在无风状态下,所述输电线上各点到所述第二直线的第二垂直距离;所述标准线点轴距所述标准重力为预先求解值;
[0030]
步骤s4、比较各个所述标准线点轴距b的大小,获取所述标准线点轴距的最大值b
m
,得到所述输电线的标准弧垂f;其中,所述标准弧垂f的大小与所述标准线点轴距的最大值b
m
的大小相等,即f=b
m
;
[0031]
步骤s5、根据所述实时线点轴距a和所述标准弧垂f,判断输电塔线路紧线是否合格;当所述实时线点轴距的最大值a
m
不在弧垂的预设范围内时,则所述输电线紧线不合格,警报器发出报警信号,根据所述报警信号对所述输电线进行松紧并重复所述步骤s1。
[0032]
在本实施例中,所述标准重力的预先求解方法为:
[0033]
在无风状态下,采集所述输电线两端的第一拉力和第二拉力根据所述第一拉力和所述第二拉力求解输电线的标准重力其中,所述标准重力
[0034]
在本实施例中,所述弧垂的预设范围为[0.9f,1.1f]。
[0035]
在本实施例中,所述步骤s5中所述报警信号包括:过紧信号,即所述实时线点轴距的所述最大值a
m
小于所述弧垂的预设范围的最小值0.9f;过松信号,即所述实时线点轴距的所述最大值a
m
大于所述弧垂的预设范围的最大值1.1f;
[0036]
对所述输电线进行松紧的标准为:当所述实时线点轴距的最大值a
m
<0.9f时,所述输电线紧线过紧,应当减小所述输电线两端的拉力并重复所述步骤s1;当所述实时线点轴距的最大值a
m
>1.1f时,所述输电线紧线不够,应当增大所述输电线两端的拉力并重复所述步骤s1。
[0037]
在本实施例中,所述方法还包括:
[0038]
在所述步骤s1之前通过人眼观测所述输电线的紧线程度。
[0039]
在本实施例中,所述无线遥控小车上设有用于对所述无线遥控小车位置信息的高精度定位探测头。
[0040]
在本实施例中,所述无线遥控小车可在所述输电线上来回运动。
[0041]
在本实施例中,所述无线遥控小车的所述实时点位置至少包括所述第一连接点或所述第二连接点其中的一点。
[0042]
下面对本实施例中涉及到的公式进行推导:
[0043]
在所述输电线固定在所述第一输电塔和所述第二输电塔后,所述输电线的所述弧垂的大小与所述风力、所述输电线的重力有关;所述风力与所述输电线的重力的合力越大,
所述实时线点轴距越大;
[0044]
由于所述第一输电塔和所述第二输电塔的距离较远,所以所述实时线点轴距a近似与风力和所述输电线的重力的合力大小呈正比;
[0045]
即c为常数;
[0046]
所述风力与所述输电线的重力的合力
[0047]
测得所述第一实时拉力和所述第二实时拉力即可得所述风力与所述输电线的重力的合力
[0048]
在有风状态下,所述风力和所述输电线的重力的合力大小与所述实时线点轴距a的第一比值为
[0049]
在无风状态下,所述标准重力与所述标准线点轴距b的第二比值为
[0050]
所述第一比值和所述第二比值的大小相等,即化简得
[0051]
以上详细描述了本发明的具体实施例。应当理解,本发明的具体实施例并不唯一,本领域的普通技术人员可以在权利要求的范围内根据本发明的构思作出诸多修改和变化。因此,凡本领域中的技术人员根据本发明的具体实施例在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1