一种实物编程机器人的电机组件铆钉固定结构的制作方法
1.本实用新型属于实物编程领域,尤其涉及一种实物编程机器人的电机组件铆钉固定结构。
背景技术:
2.传统的编程通常是通过键盘输入文本语言来完成。这种编程方式对于计算机初学者而言,理解和使用起来很不方便,主要原因是传统编程语言中的语法和复杂指令,难以被理解和记忆,同时还需要进行大量输入工作。实物编程模块被认为是图形化编程的一个分支,与图形化编程不同之处在于,实物编程模块对于程序的操作超越了计算机屏幕的限制。实物编程模块通过触觉、物理感知等技术与实物交互,再将实物逻辑转化为程序逻辑来进行编程。与直接操控电脑相比,通过操纵实物来进行创作,更容易投入到整个过程当中。通过实物编程模块,程序不再是一行行枯燥的代码,而是一组形象甚至一组实物的组合,儿童通过对实物的拼接组合,就可以完成普通程序语言通过键盘输入代码完成的工作。
3.目前的实物编程模块中,是将多个实物编程模块组合成串后将指令再输入到机器人中。机器人通过电机驱动滚轮实现移动,电机组件在安装时,定位不便,定位效果不佳,影响对滚轮的驱动效果。
技术实现要素:
4.本实用新型的目的在于:提供一种安装方便、定位牢固的实物编程机器人的电机组件固定结构,电机组件平稳的向滚轮进行动力输出。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种实物编程机器人的电机组件铆钉固定结构,包括:壳体和电机组件,壳体上设置有定位座和定位板,电机组件包括转动座和主体,转动座通过第一铆钉铰接在定位座上,转动座内设置有轴承,第一铆钉穿过转动座,轴承套设在第一铆钉上,主体通过第二铆钉固定安装在定位板上,第二铆钉穿设于主体上的通孔。
6.作为上述技术方案的进一步描述:
7.第二铆钉包括公件和母件,公件的杆体插接在母件内。
8.作为上述技术方案的进一步描述:
9.第一铆钉和第二铆钉为尼龙铆钉。
10.作为上述技术方案的进一步描述:
11.主体还设置有定位杆,定位杆卡接在定位板上的开口内。
12.作为上述技术方案的进一步描述:
13.开口的形状呈弧形。
14.作为上述技术方案的进一步描述:
15.定位杆表面设置有螺纹,定位杆通过螺母固定安装在定位板上。
16.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
17.1、本实用新型中,在安装电机组件时,先通过第一铆钉将转动座铰接在定位座上。然后转动电机组件,使得主体上的通孔对准定位板上的安装孔,并通过第二铆钉固定。第一铆钉和第二铆钉充分定位电机组件,保证安装牢固,并且通过第一铆钉固定电机组件时,电机组件无需放置在壳体上,便于安装第一铆钉。
18.2、本实用新型中,为了进一步提高电机组件的定位效果,在电机组件上还设置有定位杆,定位杆卡接在定位板上的开口内,进一步防止电机组件位置偏移。
附图说明
19.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
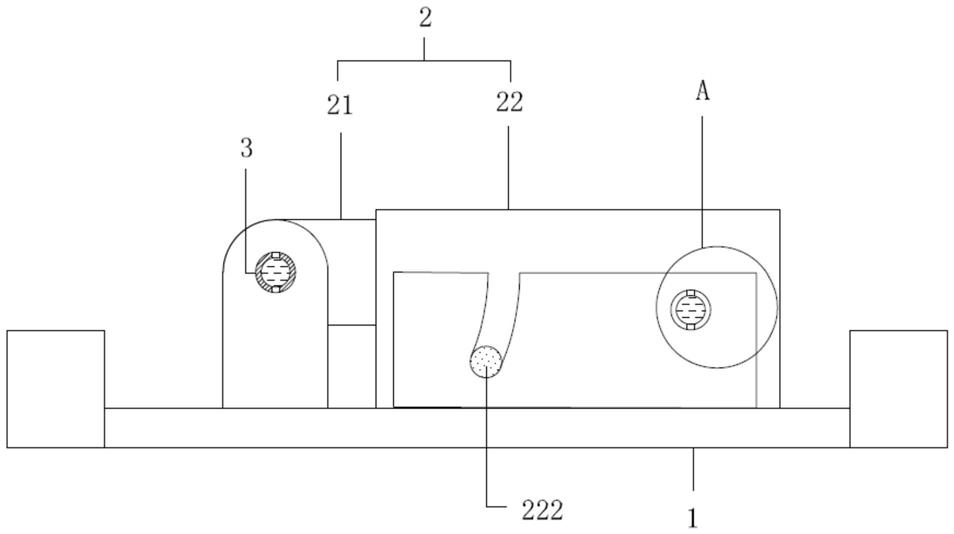
20.图1为一种实物编程机器人的电机组件铆钉固定结构的结构示意图。
21.图2为图1中a处的局部放大图。
22.图3为一种实物编程机器人的电机组件铆钉固定结构的状态变化示意图。
23.图4为一种实物编程机器人的电机组件铆钉固定结构中电机组件的结构示意图。
24.图例说明:
25.1、壳体;11、定位座;12、定位板;121、开口;2、电机组件;21、转动座;211、轴承;22、主体;221、通孔;222、定位杆;3、第一铆钉;4、第二铆钉;41、公件;42、母件;
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
27.请参阅图1
‑
4,本实用新型提供一种技术方案:一种实物编程机器人的电机组件铆钉固定结构,包括:壳体1和电机组件2,壳体1上设置有定位座11和定位板12,电机组件2包括转动座21和主体22,转动座21通过第一铆钉3铰接在定位座11上,转动座21内设置有轴承211,第一铆钉3穿过转动座21,轴承211套设在第一铆钉3上,主体22通过第二铆钉4固定安装在定位板12上,第二铆钉4穿设于主体22上的通孔221。
28.第二铆钉4包括公件41和母件42,公件41的杆体插接在母件42内,第一铆钉3和第二铆钉4结构相同。
29.第一铆钉3和第二铆钉4为尼龙铆钉,轻质且降低成本。
30.主体22还设置有定位杆222,定位杆222卡接在定位板12上的开口121内,开口121的形状呈弧形。定位杆222位置较低,开口121呈弧形一方面配合定位杆222在转动卡入定位板12中,另一方面有效防止定位杆发生竖直或水平方向位置变化。
31.定位杆222表面设置有螺纹,定位杆222通过螺母固定安装在定位板12上,进一步固定定位杆222,同时避免电机组件2位置变化。
32.工作原理:在安装电机组件时,先通过第一铆钉将转动座铰接在定位座上。然后转
动电机组件,使得主体上的通孔对准定位板上的安装孔,并通过第二铆钉固定。第一铆钉和第二铆钉充分定位电机组件,保证安装牢固,并且通过第一铆钉固定电机组件时,电机组件无需放置在壳体上,便于安装第一铆钉。为了进一步提高电机组件的定位效果,在电机组件上还设置有定位杆,定位杆卡接在定位板上的开口内,进一步防止电机组件位置偏移。
33.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种实物编程机器人的电机组件铆钉固定结构,其特征在于,包括:壳体(1)和电机组件(2),所述壳体(1)上设置有定位座(11)和定位板(12),所述电机组件(2)包括转动座(21)和主体(22),所述转动座(21)通过第一铆钉(3)铰接在所述定位座(11)上,所述转动座(21)内设置有轴承(211),所述第一铆钉(3)穿过所述转动座(21),所述轴承(211)套设在所述第一铆钉(3)上,所述主体(22)通过第二铆钉(4)固定安装在所述定位板(12)上,所述第二铆钉(4)穿设于所述主体(22)上的通孔(221)。2.根据权利要求1所述的一种实物编程机器人的电机组件铆钉固定结构,其特征在于,所述第二铆钉(4)包括公件(41)和母件(42),所述公件(41)的杆体插接在所述母件(42)内。3.根据权利要求2所述的一种实物编程机器人的电机组件铆钉固定结构,其特征在于,所述第一铆钉(3)和所述第二铆钉(4)为尼龙铆钉。4.根据权利要求1所述的一种实物编程机器人的电机组件铆钉固定结构,其特征在于,所述主体(22)还设置有定位杆(222),所述定位杆(222)卡接在所述定位板(12)上的开口(121)内。5.根据权利要求4所述的一种实物编程机器人的电机组件铆钉固定结构,其特征在于,所述开口(121)的形状呈弧形。6.根据权利要求4所述的一种实物编程机器人的电机组件铆钉固定结构,其特征在于,所述定位杆(222)表面设置有螺纹,所述定位杆(222)通过螺母固定安装在所述定位板(12)上。
技术总结
本实用新型公开了一种实物编程机器人的电机组件铆钉固定结构,包括:壳体和电机组件,壳体上设置有定位座和定位板,电机组件包括转动座和主体,转动座通过第一铆钉铰接在定位座上,转动座内设置有轴承,第一铆钉穿过转动座,轴承套设在第一铆钉上,主体通过第二铆钉固定安装在定位板上,第二铆钉穿设于主体上的通孔。本实用新型公开的一种实物编程机器人的电机组件铆钉固定结构,安装方便、定位牢固,电机组件平稳的向滚轮进行动力输出。组件平稳的向滚轮进行动力输出。组件平稳的向滚轮进行动力输出。
技术研发人员:赵敬双
受保护的技术使用者:苏州乐派特机器人有限公司
技术研发日:2020.12.29
技术公布日:2021/10/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1