直流电源多路输出保护电路单元、保护电路及水下机器人的制作方法
1.本技术属于遥控水下机器人,特别涉及一种用于水下机器人的直流电源多路输出的保护电路单元、一种用于水下机器人的直流电源多路输出保护电路及一种遥控水下机器人。
背景技术:
2.目前,遥控水下机器人的电子系统越来越复杂,其可靠性要求也日益提高。在遥控水下机器人的电子系统内一般会包含一个直流稳压电源和若干个负载。当某个负载出现短路故障时,会触发直流稳压电源的过流或短路保护功能。该电源一般会因此而停止输出,从而导致整个设备就会停机。
技术实现要素:
3.基于此,本技术提供了一种用于水下机器人的直流电源多路输出的保护电路单元,包括:输入端;输出端;负载电压检测电路,用于检测所述输出端的电压;开关电路,控制所述输入端与所述输出端之间的导通/断开;预充电电路,在所述开关电路断开时,由所述输入端向所述输出端限流充电。
4.可选地,在所述输入端的电压与所述输出端的电压的差值低于第一电压阈值时,所述开关电路可以受控导通。
5.可选地,所述开关电路可以包括:第一开关管,第一端和第二端分别连接所述输入端和所述输出端;驱动电路,连接于所述第一开关管的控制端与所述控制器之间。
6.可选地,所述第一开关管可以为单极型晶体管或者双极型晶体管;所述第一端可以为漏极或者集电极;所述第二端可以为源极或者发射极;所述控制端可以为栅极或者基极。
7.可选地,所述预充电电路可以包括:第一电阻器,连接于所述输入端和所述输出端之间。
8.本技术还提供一种用于水下机器人的直流电源多路输出保护电路,包括:至少两个前述保护电路单元,分别为至少两个负载供电,至少两个所述保护电路单元的输入端相互连接;输入电压检测器,与至少两个所述保护电路单元连接,用于检测至少两个所述保护电路单元的输入端电压;控制器,与所述输入电压检测器连接,并与所述至少一个保护电路单元连接。
9.可选地,在所述保护电路单元的输入端电压与所述保护电路单元的输出端电压的差值<第一电压阈值且所述保护电路单元的输入端电压大于第二电压阈值时,所述控制器控制所述保护电路单元的开关电路导通;所述保护电路单元的输入端电压小于第三电压阈值且所述保护电路单元的输入端电压与输出端电压的差值<第一电压阈值时,关断所述保护电路单元的开关电路;在所述保护电路单元的输入端电压与所述保护电路单元的输出端电压的差值≥所述第一电压阈值时,维持关断所述保护电路单元的开关电路。
10.可选地,所述直流电源多路输出保护电路还可以包括:第一直流电源,与所述保护电路单元的输入端连接。
11.可选地,所述第一直流电源具有短路保护功能。
12.可选地,所述直流电源多路输出保护电路还可以包括:辅助电源,为所述控制器供电。
13.本技术还提供一种遥控水下机器人,包括前述任意一种直流电源多路输出保护电路。
14.本技术的一些实施例提供了一种保护电路单元。 保护电路单元可以利用简单的拓扑结构实现负载的短路检测。在对目标负载上电之前,可以利该保护电路单元中的预充电电路对目标负载进行预充电。如果目标负载的电压可以有效升高,使得主电源电压与该电压差值小于第一电压阈值。则可以判断该目标负载尚未发生短路故障。如果在第一预设时间内,目标负载的电压未能有效升高,主电源电压与目标负载的电压的差值始终大于等于第一电压阈值,则可以判断该目标负载已经发生短路故障。
15.如果目标负载未发生短路故障,则可以对其进行供电;如果该目标已发生短路故障,则可以保持切断其电源供应。
16.该保护电路单元的拓扑结构简单,成本低廉。该保护电路单元的预充电电路可以仅包括一个电阻器。该保护电路单元的开关管的打开过程可以在较小端电压时进行。该保护电路单元的开关管的关断过程可以在零电流状态下进行。因而,该保护电路单元的开关管的响应速度要求和开关特性要求很低。该保护电路单元的开关电路的拓扑结构也可以相对简单。因而本技术提供的保护电路单元的结构可以非常简单,成本可以非常低廉。
17.本技术的另一些实施例可以提供一种保护电路。该保护电路可以应用于遥控水下机器人,并包括多个前述任意一种保护电路单元。该遥控水下机器人可以包括多个组件。该多个组件可以均由同一电源供电。在发生短路故障时,可以利用上述多个保护电路单元在多个组件中甄别发生短路故障的组件。并可以仅为尚未发生短路故障的组件供电,避免已发生短路故障的组件对遥控水下机器人产生不良影响。因而,而在部分组件发生短路故障时,在该遥控水下机器人仍然可以工作。
18.本技术的另一些实施例可以提供一种遥控水下机器人。该遥控水下机器人内置前述任意一种保护电路。在遥控水下机器人的部分组件发生短路故障时,可以利用上述保护电路快速甄别其中发生短路故障的组件,并可以只为尚未发生短路故障的组件供电。在部分组件发生短路故障时,该遥控水下机器人仍然可以工作。从而提高了遥控水下机器的健壮性和可靠性。同时由于该保护电路的结构简单成本低廉。因而该遥控水下机器人的结构也可以相对简单,成本也可以相对低廉。
附图说明
19.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图,而并不超出本技术要求保护的范围。
20.图1示出了本技术的一个实施例用于水下机器人的直流电源多路输出的保护电路
单元的原理示意图。
21.图2示出了本技术的另一实施例用于水下机器人的直流电源多路输出保护电路的原理示意图。
22.图3示出了本技术提供的另一实施例遥控水下机器人的组成示意图。
具体实施方式
23.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
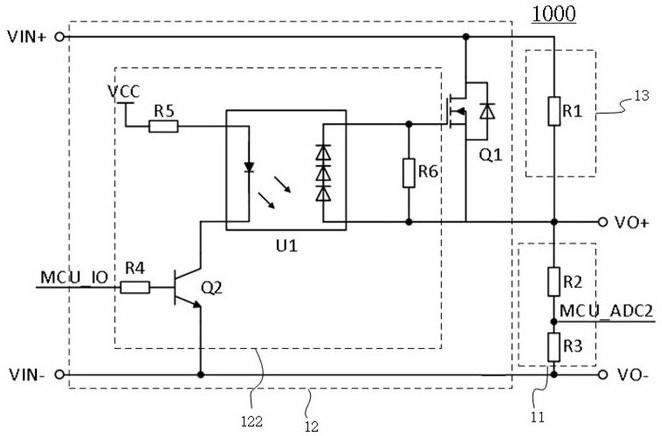
24.图1示出了本技术的一个实施例用于水下机器人的直流电源多路输出的保护电路单元的原理示意图。水下机器人的主电源(未示出)一般采用直流电源。水下机器人的各个模块可以作为负载并联于主电源的输出端,由主电源供电。图1所示的保护电路单元1000可以级联于主电源和负载之间。
25.如图1所示,保护电路单元1000可以是二端网络电路。保护电路单元1000可以包括输入端vin+和vin
‑
,以及可以包括输出端vo+和vo
‑
。保护电路单元1000的输入端vin+和vin
‑
可以连接于主电源(未示出)。该主电源可以是遥控水下机器人的主供电电源。
26.如图1所示,保护电路单元1000的输出端vo+和vo
‑
可以连接于负载(未示出)。该负载可以是水下机器人的组成模块。比如负载可以包括推进器、照明单元、摄像单元、声学单元、通信单元等。
27.如图1所示,保护电路单元1000的输入端vin
‑
和输出端vo
‑
可以直接连接,并可以作为保护电路单元1000的参考地。
28.如图1所示,保护电路单元1000可以包括负载电压检测电路11、开关电路12和预充电电路13。
29.如图1所示,预充电电路13可以跨接于输入端vin+和输出端vo+之间。预充电电路13可以用于检测负载是否发生短路故障。在开关电路12关断时,预充电电路13可以用于向负载限流充电。一般负载都会在电源输入端会设置一个电容。如果负载未发生短路故障, 则该电容两端的电压可以因限流充电而逐步升高,即输出端vo+和vo
‑
之间的输出端电压v
out
可以逐步升高。如果该负载发生了短路故障,则该电容两端的电压则难以升高,即输出端电压v
out
难以升高。
30.如图1所示,预充电电路13可以包括电阻器r1。电阻器r1可以跨接于输入端vin+和输出端vo+之间。如果增加电阻器r1的电阻值,可以降低短路检测时的功率损耗,但是会增加短路检测的用时。如果降低电阻器r1的电阻值可以减少短路检测的用时,但是会提高短路检测的功率损耗。电阻器r1的阻值可以根据负载的输入电容和主电源的电压合酌情设置。
31.如图1所示,负载电压检测电路11可以连接于输出端vo+和vo
‑
之间。负载电压检测电路11可以用于检测输出端vo+和vo
‑
之间的输出端电压v
out
。可以根据输出端电压v
out
与输入端电压v
in
的差值判断负载是否处于短路故障状态。
32.如果输入端电压v
in
与输出端电压v
out
的差值小于第一电压阈值,且输入端电压v
in
大于第二电压阈值,则可以判断此时主电源已经正常供电,且负载尚未发生短路故障。其中第一电压阈值可以是一个比较小的电压值,比如可以是1v或者0.1v或者其他电压值。第二电压阈值可以是接近于主电源的额定输出的电压值,比如可以是主电源额定电压的80%。
33.如果输入端电压v
in
小于第三电压阈值,则可以判断此时主电源已经关闭输出。此时主电源可能正常关闭输出,也可能因故障而被迫关闭输出。其中第三电压阈值可以是一个较小的电压值,比如可以是主电源额定电压的10%。
34.如果在第一预设时间内,输入端电压v
in
与输出端电压v
out
的差值持续大于等于第一电压阈值,则可以判断负载处于短路故障状态。
35.可选地,负载电压检测电路11可以包括电阻器r2和电阻器r3。电阻器r2和电阻器r3可以串联连接于输出端vo+和vo
‑
之间。电阻器r2和电阻器r3可以串联组成分压器。电阻器r2和电阻器r3的分压点可以作为负载电压检测电路11的输出端。
36.如图1所示,开关电路12可以包括:开关管q1和驱动电路122。其中,开关管q1可以是保护电路单元1000的主开关。开关管q1的第一端和第二端可以分别连接于输入端vin+和输出端vo+。在确定前述负载尚未发生短路故障时,可以导通开关管q1,使得主电源可以正常向负载供电。
37.开关管q1可以是单极型晶体管也可以是双极型晶体管。比如开关管q1可以是n沟道场效应管,也可以是p沟道场效应管。开关管q1可以是pnp型三极管,也可以是npn型三极管。可选地,开关管q1也可以是igbt。
38.开关管q1的控制端可以是基极,也可以是栅极。开关管q1的第一端可以是集电极,也可以是漏极。开关管q1的第二端可以是发射极,也可以是源极。
39.如示例实施例所示,开关管q1为n沟道场效应管。开关管q1的第一端可以连接于输入端vin+。开关管q1的第二端可以连接于输出端vo+。开关管q1的控制端可以连接于驱动电路122。
40.如图1所示,驱动电路122可以与开关管q1的控制端连接,用于驱动开关管q1。可选地,驱动电路122可以是隔离型驱动电路。驱动电路122可以包括光电耦合器u1。光电耦合器u1的感光侧可以与开关管q1的控制端连接。
41.如图1所示,驱动电路122还可以包括开关管q2。开关管q2可以用于驱动光电耦合器u1。
42.开关管q2可以是单极型晶体管也可以是双极型晶体管。比如开关管q2可以是n沟道场效应管,也可以是p沟道场效应管。开关管q2可以是pnp型三极管,也可以是npn型三极管。
43.开关管q2的控制端可以是基极,也可以是栅极。开关管q2的第一端可以是集电极,也可以是漏极。开关管q2的第二端可以是发射极,也可以是源极。
44.如示例实施例所示,开关管q2为npn型三极管。开关管q2的第一端可以连接于光电耦合器u1发光侧的发光二极管的阴极。开关管q2的第二端可以连接于参考地,即可以连接于输入端vin
‑
。
45.可选地,驱动电路122也可以包括电阻器r4。电阻器r4的一端可以连接于开关管q2的控制端;另一端可以作为开关电路12的输入端,与控制器(未示出)连接,接受该控制器的控制。电阻器r4可以用于限制该控制器的输出电流,保护该控制器。
46.可选地,驱动电路122还可以包括电阻器r6。电阻器r6可以连接于开关管q1的控制端和第二端之间。电阻器r6可以用于泄放开关管q1控制端上的感应电荷,保护开关管q1,并防止开关管q1误动作。
47.可选地,驱动电路122还可以包括电阻器r5。电阻器r5可以连接于光电耦合器u1发光侧的发光二极管的阳极与电源vcc之间。电阻器r5可以用于限制光电耦合器u1发光侧的电流,保护光电耦合器u1。可选地,电源vcc可以是独立于主电源的辅助电源。
48.可选地,保护电路单元1000可以包括控制器。保护电路单元1000也可以不包括控制器,但是多个保护电路单元1000可以共同连接于同一控制器。
49.控制器可以内置ad转换器,并可以与负载电压检测电路11连接。控制器可以采集负载电压检测电路11的输出信号作为输出端电压v
out
的采样值。控制器还可以同时采集输入端电压v
in
。控制器还可以与开关电路12的输入端连接,并可以根据输出端电压v
out
和输入端电压v
in
控制开关电路12。
50.可选地,主电源可以为多个负载并联供电。其中至少一个负载与该主电源之间可以级联保护电路单元1000。在系统运行过程中,如果上述多个负载中的至少一个发生短路故障。则主电源可以执行保护动作,而暂时关闭输出。此时,保护电路单元1000中的开关电路12可以关断开关管q1。
51.在短暂的关闭输出后,主电源可以尝试着重新输出。此时保护电路单元1000可以检验所连接的负载是否已经发生短路故障。在确保所连接的负载未发生短路故障时,保护电路单元1000可以导通开关管q1,重新为所连接的负载供电。如果所连接的负载已经发生短路故障,则可以维持关断开关管q1,暂缓对该负载供电。
52.利用上述方式可以实现对并联供电的多个负载进行故障隔离。在发生部分组件故障时,可以利用保护电路单元1000确保系统仍能利用尚未发生故障的组件继续工作。从而可以使得包含保护电路单元1000的系统的可靠性可以更高,工作稳定性可以更好。
53.图2示出了本技术的另一实施例用于水下机器人的直流电源多路输出保护电路的原理示意图。
54.保护电路2000可以应用于水下机器人的故障隔离。该水下机器人可以包括主电源251和第一负载241、第二负载242、
……
、第n负载24
n
之间,其中n可以为≥2的整数。第一负载241、第二负载242、
……
、第n负载24
n
可以是水下机器人的多个组件。该多个组件可以是推进器、图像获取单元、声学单元和通信单元等。第一负载241、第二负载242、
……
、第n负载24
n
可以并联于主电源251的输出端。
55.保护电路2000可以设置于主电源251与第一负载241、第二负载242、
……
、第n负载24
n
之间。在第一负载241、第二负载242、
……
、第n负载24
n
中的至少一个发生短路故障时,保护电路2000可以在第一负载241、第二负载242、
……
、第n负载24
n
中甄别发生短路故障的负载。保护电路2000还可以选择性地导通尚未发生短路故障的负载与主电源251之间的联系,并维持断开已发生短路故障的负载与主电源251之间连接。从而可以确保主电源251可以正常地对尚未发生短路故障的负载供电,确保该水下机器人仍能工作。
56.如图2所示,保护电路2000可以包括:控制器21、输入电压检测器22和至少两个保护电路单元。如图1所示,保护电路2000可以包括n个保护电路单元,分别为第一保护电路单元231、第二保护电路单元232、
……
、第n保护电路单元23
n
。第一保护电路单元231、第二保护
电路单元232、
……
、第n保护电路单元23
n
中的至少一个可以是前述任意一种保护电路单元。上述n个保护电路单元可以与主电源251连接,并可以分别与第一负载241、第二负载242、
……
、第n负载24
n
连接。
57.比如,第一保护电路单元231的输入端可以连接于主电源251的输出端,输出端可以连接于第一负载241。第一保护电路单元231可以控制主电源251与第一负载241之间的断开/导通。第一保护电路单元231还可以用于检测第一负载241是否处于短路状态。
58.第二保护电路单元232的输入端可以连接于主电源251的输出端,输出端可以连接于第二负载242。第二保护电路单元232可以控制主电源251与第二负载242之间的断开/导通。第二保护电路单元232还可以用于检测第二负载242是否处于短路状态。
59.第n保护电路单元23
n
的输入端可以连接于主电源251的输出端,输出端可以连接于第n负载24
n
。第n保护电路单元23
n
可以控制主电源251与第n负载24
n
之间的断开/导通。第n保护电路单元23
n
还可以用于检测第n负载24
n
是否处于短路状态。
60.输入电压检测器22可以连接于主电源251的输出端,可以用于检测主电源251的输出电压。主电源251的输出电压即第一保护电路单元231、第二保护电路单元232、
……
、第n保护电路单元23
n
的输入端电压v
in
。
61.可选地,输入电压检测器22可以包括电阻器r7(未示出)和r8(未示出)。电阻器r7和r8可以串联连接,组成的分压器。电阻器r7和r8的分压点可以作为输入电压检测器22的输出端,连接于控制器21。
62.如图2所示,控制器21可以与输入电压检测器22连接,并可以与第一保护电路单元231、第二保护电路单元232、
……
、第n保护电路单元23
n
中的至少一个连接。
63.控制器21可以包括ad转换器。控制器21的一个ad转换接口可以与输入电压检测器22的输出端连接,采集输入电压检测器22的输出端的电压值,作为输入端电压v
in
的采样值。
64.控制器21的其他多个ad转换接口可以分别与第一保护电路单元231、第二保护电路单元232、
……
、第n保护电路单元23
n
的输出端连接,分别检测第一保护电路单元231的输出端电压v
out1
、第二保护电路单元232的输出端电压v
out2
、
……
、第n保护电路单元23
n
的输出端电压v
outn
。
65.控制器21还可以分别与第一保护电路单元231的开关电路的输入端、第二保护电路单元232的开关电路的输入端、
……
、第n保护电路单元23
n
的开关电路的输入端连接。分别控制第一保护电路单元231的开关电路的导通/关断、第二保护电路单元232的开关电路的导通/关断、
……
、第n保护电路单元23
n
的开关电路的导通/关断。
66.控制器21的控制逻辑可以如下:在系统上电之前,或者主电源251触发短路保护时,主电源251不对外输出时,输入端电压v
in
<第三电压阈值。此时,控制器21可以分别通过切断第一保护电路单元231的开关电路、第二保护电路单元232的开关电路、
……
、第n保护电路单元23
n
的开关电路,实现分别切断第一负载241、第二负载242、
……
、第n负载24
n
与主电源251之间的连接。
67.进一步地,可以在输入端电压v
in
<第三电压阈值,且输入端电压v
in
与第一保护电路单元231的输出端电压v
out1
的差值<第一电压阈值时,控制器21可以切断第一负载241与主电源251之间的连接。控制器21可以通过切断第一保护电路单元231的开关电路,实现切断第一负载241与主电源251之间的连接。类似地,控制器21可以利用相似逻辑切断第二负载
242、
……
、第n负载24
n
与主电源251之间的连接。
68.随后,在主电源251启动输出时,控制器21可以维持切断第一负载241、第二负载242、
……
、第n负载24
n
与主电源251之间的连接。并可以利用各个保护电路单元内的预充电电路,分别对各个负载进行充电。
69.如果第一保护电路单元231的输出端电压v
out1
逐步升高,直到输入端电压v
in
与第一保护电路单元231的输出端电压v
out1
的差值<第一电压阈值。此时如果输入端电压v
in
>第二电压阈值,则可以判定第一负载241尚未发生短路故障,且主电源正常输出。此时可以导通第二负载242与主电源251之间的连接。
70.如果在第一预设时间内,输入端电压v
in
与第一保护电路单元231的输出端电压v
out1
的差值始终≥第一电压阈值,则可以判定第一负载241已经发生短路故障。可以维持断开第一负载241与主电源251之间的连接,并上报故障信息。
71.类似地,如果第二保护电路单元232的输出端电压v
out2
逐步升高,直到输入端电压v
in
与第二保护电路单元232的输出端电压v
out2
的差值<第一电压阈值。此时如果输入端电压v
in
>第二电压阈值,则可以判定第二负载242尚未发生短路故障,且主电源正常输出。此时可以导通第二负载242与主电源251之间的连接。
72.如果在第一预设时间内,输入端电压v
in
与第二保护电路单元232的输出端电压v
out2
的差值始终≥第一电压阈值,则可以判定第二负载242已经发生短路故障。可以维持断开第二负载242与主电源251之间的连接,可以上报故障信息。
73.如果第n保护电路单元23
n
的输出端电压v
outn
逐步升高,直到输入端电压v
in
与第n保护电路单元23
n
的输出端电压v
outn
的差值<第一电压阈值。此时如果输入端电压v
in
>第二电压阈值,则可以判定第n负载24
n
尚未发生短路故障,且主电源正常输出。此时可以导通第n负载24
n
与主电源251之间的连接。
74.如果在第一预设时间内,输入端电压v
in
与第n保护电路单元23
n
的输出端电压v
outn
的差值始终≥第一电压阈值,则可以判定第n负载24
n
已经发生短路故障。可以维持断开第n负载24
n
与主电源251之间的连接,此时可以上报故障信息。
75.通过上述方式可以简单有效地从并联连接的多个负载中甄别已经发生短路故障的负载。并可以仅对尚未发生短路故障的负载进行供电。因而可以在部分组件损坏的时候,仍然可以保证水下机器人可以运行。
76.可选地,控制器21可以包括处理器(未示出)和存储器(未示出)。存储器可以存储处理器可执行的程序。当该程序被执行时,处理器执行控制器21的前述逻辑功能。可选地,处理器可以是微控制单元(microcontroller unit;mcu) ,也可以是逻辑编程器件cpld或者fpga。可选地,处理器可以内嵌ad转换器(未示出)。
77.如图2所示,可选地,保护电路2000可以包括主电源251。其中,主电源251具备过流保护及短路保护功能。
78.如图2所示,可选地,保护电路2000还可以包括辅助电源252。辅助电源252可以是独立于主电源251的电源。辅助电源252可以为主电源251辅助供电。辅助电源252也可以分别为第一保护电路单元231、第二保护电路单元232、
……
、第n保护电路单元23
n
供电。辅助电源252还可以为控制器21供电。
79.图3示出了本技术提供的另一实施例遥控水下机器人的组成示意图。
80.如图3所示,遥控水下机器人3000可以包括高压直流电源311。高压直流电源311可以是遥控水下机器人3000的主电源。高压直流电源311可以用于把来自脐带缆的电能转换成遥控水下机器人所需要的高压直流电。
81.如图3所示,遥控水下机器人3000还可以包括多个大功率设备。该多个大功率设备可以包括多个推进器和低压直流电源312。比如遥控水下机器人3000可以包括多个推进器,比如第一推进器331、第二推进器332
……
。该多个推进器可以分别独立工作,也可以协同工作。可选地,遥控水下机器人3000还可以包括多个刹车能量吸收器分别与上述多个推进器连接。比如遥控水下机器人3000可以包括多个刹车能量吸收器,比如:第一刹车能量吸收器341、第二刹车能量吸收器342。第一刹车能量吸收器341可以与第一推进器331连接。第二刹车能量吸收器342可以与第二推进器332连接。
82.如图3所示,遥控水下机器人也可以包括高压电源多路输出保护321。高压电源多路输出保护321可以是前述任意一种保护电路。高压电源多路输出保护321可以用于甄别前述多个大功率设备中发生短路故障的大功率设备。并可以使得高压直流电源311仅为尚未发生短路故障的大功率设备供电。从而可以确保遥控水下机器人3000在发生部分大功率设备短路故障时,仍可运动,其他功能组件也依然可以正常使用。
83.如图3所示,遥控水下机器人3000还可以包括低压直流电源312。低压直流电源312可以用于把高压直流电转换成低压直流电。该低压直流电可以用于为遥控水下机器人3000内的低压设备供电。
84.如图3所示,遥控水下机器人3000也可以包括多个低压设备。比如可以包括:照明灯361、摄像头362、声学设备363、通信系统364和导航系统365等。
85.如图3所示,在低压直流电源312与上述多个低压设备之间,遥控水下机器人还可以包括低压电源多路输出保护322。低压电源多路输出保护322可以是前述任意一种保护电路。低压电源多路输出保护322可以用于从前述多个低压设备中甄别已发生短路故障的低压设备,并可以使得低压直流电源312仅为尚未发生短路故障的低压设备供电。在遥控水下机器人3000的部分低压设备发生短路故障时,遥控水下机器人3000仍然可以工作。
86.如图3所示,遥控水下机器人3000还可以包括应急电池313。可选地,应急电池313可以为遥控水下机器人3000的关键设备提供备用供电。比如应急电池313可以为通信系统364和导航系统365提供备用供电。
87.本技术的一些实施例提供了一种保护电的路单元。 保护电路单元可以利用简单的拓扑结构实现负载的短路检测。在对目标负载上电之前,可以利该保护电路单元中的预充电电路对目标负载进行预充电。如果目标负载的电压可以有效升高,使得主电源电压与该电压差值小于第一电压阈值。则可以判断该目标负载尚未发生短路故障。如果在第一预设时间内,目标负载的电压未能有效升高,主电源电压与目标负载的电压的差值始终大于等于第一电压阈值,则可以判断该目标负载已经发生短路故障。
88.如果目标负载未发生短路故障,则可以对其进行供电;如果该目标已发生短路故障,则可以保持切断其电源供应。
89.该保护电路单元的拓扑结构简单,成本低廉。该保护电路单元的预充电电路可以仅包括一个电阻器。该保护电路单元的开关管的打开过程可以在较小端电压时进行。该保护电路单元的开关管的关断过程可以在零电流状态下进行。因而,该保护电路单元的开关
管的响应速度要求和开关特性要求很低。该保护电路单元的开关电路的拓扑结构也可以相对简单。因而本技术提供的保护电路单元的结构可以非常简单,成本可以非常低廉。
90.本技术的另一些实施例可以提供一种保护电路。该保护电路可以应用于遥控水下机器人,并包括多个前述任意一种保护电路单元。该遥控水下机器人可以包括多个组件。该多个组件可以均由同一电源供电。在发生短路故障时,可以利用上述多个保护电路单元在多个组件中甄别发生短路故障的组件。并可以仅为尚未发生短路故障的组件供电,避免已发生短路故障的组件对遥控水下机器人产生不良影响。因而,而在部分组件发生短路故障时,在该遥控水下机器人仍然可以工作。
91.本技术的另一些实施例可以提供一种遥控水下机器人。该遥控水下机器人内置前述任意一种保护电路。在遥控水下机器人的部分组件发生短路故障时,可以利用上述保护电路快速甄别其中发生短路故障的组件,并可以只为尚未发生短路故障的组件供电。在部分组件发生短路故障时,该遥控水下机器人仍然可以工作。从而提高了遥控水下机器的健壮性和可靠性。同时由于该保护电路的结构简单成本低廉。因而该遥控水下机器人的结构也可以相对简单,成本也可以相对低廉。
92.以上对本技术实施例进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明仅用于帮助理解本技术的方法及其核心思想。同时,本领域技术人员依据本技术的思想,基于本技术的具体实施方式及应用范围上做出的改变或变形之处,都属于本技术保护的范围。综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1