一种变电站巡检机器人自动识别定位充电装置的制作方法
1.本实用新型涉及变电站巡检设备领域,特别是一种变电站巡检机器人自动识别定位充电装置。
背景技术:
2.随着巡检机器人技术的不断发展,得到了更多的人们的关注,变电站机器人主要是以轮式自主巡检为代表,采用四驱底盘装置,根据自主导航,对变电站进行自主巡检以及故障的识别,代替人们完成复杂以及重复的日常工作。
3.其中,为了保证机器人有长久的自主巡检能力,需要保证机器人有足够的续航时间,因此,对机器人的充电装置及方法是需要解决的问题。一般是采用蓄电池对机器人进行来回更换,从而去保证机器人有着持久的续航能力,完成自主巡检的目的。但是这种人工操作的方法很难保证机器人能够及时进行充电,也给用户带来了一定的麻烦。另外一种是采用有轨道的巡检装置,需要机器人按照提前铺设好的轨道进行巡检,这种方式会带来很大的施工难度,需要对电厂进行大规模的设计,给用户带来一定的麻烦。还有一种的采用在充电室进行充电,是根据识别充电室门中的二维码进行充电房门的关闭,机器人接于充电桩进行充电,但是这种方式会造成由于二维码的不清楚造成识别的不准确以及在充电房内接触不良等问题。
技术实现要素:
4.本实用新型所要解决的技术问题是提供一种变电站巡检机器人自动识别定位充电装置,能够自动精准地识别充电装置和充电桩是否对准,并精确地进行充电动作。
5.为解决上述技术问题,本实用新型所采用的技术方案是:
6.一种变电站巡检机器人自动识别定位充电装置,包括充电桩和伸缩充电插头机构,伸缩充电插头机构与支架滑动连接,充电桩上设有激光模块,伸缩充电插头机构上设有ccd图像传感器,由激光模块射出激光被ccd图像传感器接收后形成图像进行处理后判断伸缩充电插头机构和充电桩是否对准,判断对准后通过伸缩充电插头机构的伸缩实现充电。
7.上述的充电桩结构为:充电桩为长方体形状,充电桩面向伸缩充电插头机构的充电方向端面上设有导向锥孔,导向锥孔的底面设有充电插孔,在导向锥孔四周设有激光发射孔,激光发射孔后端连接导光管,导光管另一端设有激光模块。
8.上述的导光管斜向布置,沿着激光发射方向朝中间聚拢。
9.上述的导向锥孔底面后端设有磁块,充电插孔贯穿磁块。
10.上述的伸缩充电插头机构结构为:包括移动滑块,移动滑块和支架滑动连接,移动滑块朝向充电桩的前端面上设有导向锥台,导向锥台顶端设有充电插头,ccd图像传感器位于导向锥台端面,移动滑块后端面上设有伸缩驱动杆。
11.上述的移动滑块两侧面设有导向滑台和充电杆,导向滑台与支架滑动连接,充电杆与两侧的导电滑轨滑动接触。
12.上述的导向锥台上设有磁环。
13.上述的支架包括伸缩槽,伸缩槽两侧壁上设有滑槽,导向滑台和滑槽滑动连接。
14.本实用新型提供的一种变电站巡检机器人自动识别定位充电装置,通过充电桩上的激光模块发出激光,激光通过导光管的导向后聚拢并射向ccd图像传感器上,ccd图像传感器接收激光点图像并与预设的标准图像进行比对,以判断充电装置是否达到充电位置,然后通过充电装置的伸缩和锥孔的导向实现精准充电动作,本装置结构简单,可靠性高,适合在机器人领域推广使用。
附图说明
15.下面结合附图和实施例对本实用新型作进一步说明:
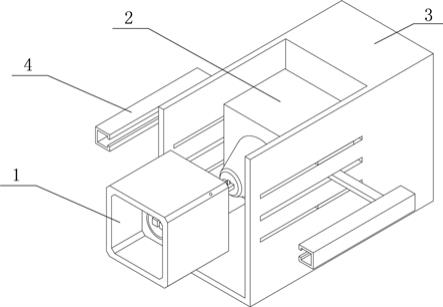
16.图1为本实用新型的整体结构示意图;
17.图2为充电桩的结构示意图;
18.图3为充电桩的正视图;
19.图4为图3中a
‑
a的剖视图;
20.图5为图3中b
‑
b的剖视图;
21.图6为伸缩充电插头机构的结构示意图;
22.图7为伸缩充电插头机构的正视图;
23.图8为支架的结构示意图;
24.图9为本实用新型的定位识别示意图。
25.图中:充电桩1、导向锥孔101、激光发射孔102、走线孔103、充电插孔104、磁块105、激光模块106、导光管107、伸缩充电插头机构2、移动滑块201、导向锥台202、充电插头203、ccd图像传感器204、磁环205、导向滑台206、充电杆207、伸缩驱动杆208、支架3、伸缩槽31、滑槽32、导电滑轨4。
具体实施方式
26.如图1
‑
图9中所示,一种变电站巡检机器人自动识别定位充电装置,包括充电桩1和伸缩充电插头机构2,伸缩充电插头机构2与支架3滑动连接,充电桩1上设有激光模块106,伸缩充电插头机构2上设有ccd图像传感器204,由激光模块106射出激光被ccd图像传感器204接收后形成图像进行处理后判断伸缩充电插头机构2和充电桩1是否对准,判断对准后通过伸缩充电插头机构2的伸缩实现充电,由于激光具有优良的方向型,当伸缩充电插头机构2初始位置不正确时,聚拢在ccd图像传感器204上的图像存在微小的误差,这种误差经过图像处理后可以被识别出来,从而判断充电位置是否调整好,巡检机器人还可以通过图像处理后得出的误差调整自身位置实现精确对准。
27.上述的充电桩1结构为:充电桩1为长方体形状,充电桩1面向伸缩充电插头机构2的充电方向端面上设有导向锥孔101,导向锥孔101的底面设有充电插孔104,在导向锥孔101四周设有激光发射孔102,激光发射孔102后端连接导光管107,导光管107另一端设有激光模块106,通过导向锥孔101的锥形具有的良好导向及纠偏性能,对伸出时的伸缩充电插头机构2细微误差进行精准导向,使充电插头对准插孔。
28.上述的导光管107斜向布置,沿着激光发射方向朝中间聚拢,斜向布置并聚拢的导
光管107可以将激光聚拢,这样使得在初始位置未伸出的伸缩充电插头机构2上聚拢的激光面积小,方便布置ccd图像传感器。
29.上述的导向锥孔101底面后端设有磁块105,充电插孔104贯穿磁块105,在伸缩充电插头机构2伸出的末端,导向锥孔101的导向作用使得插头和插孔已经对准,磁块105对伸缩充电插头机构2的磁力作用持续增大,最终由磁块105将充电机构吸紧,防止外部误触碰使得充电插头和充电桩分离,导致充电中断。
30.上述的伸缩充电插头机构2结构为:包括移动滑块201,移动滑块201和支架3滑动连接,移动滑块201朝向充电桩1的前端面上设有导向锥台202,导向锥台202顶端设有充电插头203,ccd图像传感器204位于导向锥台202端面,移动滑块201后端面上设有伸缩驱动杆208,导向锥台202和导向锥孔101配合使得定位更加精准。
31.上述的移动滑块201两侧面设有导向滑台206和充电杆207,导向滑台206与支架3滑动连接,充电杆207与两侧的导电滑轨4滑动接触。
32.上述的导向锥台202上设有磁环205,磁环205和磁块105相互作用,使得充电时插头和插座连接紧密。
33.上述的支架3包括伸缩槽31,伸缩槽31两侧壁上设有滑槽32,导向滑台206和滑槽32滑动连接。
技术特征:
1.一种变电站巡检机器人自动识别定位充电装置,其特征是:包括充电桩(1)和伸缩充电插头机构(2),伸缩充电插头机构(2)与支架(3)滑动连接,充电桩(1)上设有激光模块(106),伸缩充电插头机构(2)上设有ccd图像传感器(204),由激光模块(106)射出激光被ccd图像传感器(204)接收后形成图像进行处理后判断伸缩充电插头机构(2)和充电桩(1)是否对准,判断对准后通过伸缩充电插头机构(2)的伸缩实现充电。2.根据权利要求1所述的一种变电站巡检机器人自动识别定位充电装置,其特征在于,所述的充电桩(1)结构为:充电桩(1)为长方体形状,充电桩(1)面向伸缩充电插头机构(2)的充电方向端面上设有导向锥孔(101),导向锥孔(101)的底面设有充电插孔(104),在导向锥孔(101)四周设有激光发射孔(102),激光发射孔(102)后端连接导光管(107),导光管(107)另一端设有激光模块(106)。3.根据权利要求2所述的一种变电站巡检机器人自动识别定位充电装置,其特征在于,所述的导光管(107)斜向布置,沿着激光发射方向朝中间聚拢。4.根据权利要求2所述的一种变电站巡检机器人自动识别定位充电装置,其特征在于,所述的导向锥孔(101)底面后端设有磁块(105),充电插孔(104)贯穿磁块(105)。5.根据权利要求4所述的一种变电站巡检机器人自动识别定位充电装置,其特征在于,所述的伸缩充电插头机构(2)结构为:包括移动滑块(201),移动滑块(201)和支架(3)滑动连接,移动滑块(201)朝向充电桩(1)的前端面上设有导向锥台(202),导向锥台(202)顶端设有充电插头(203),ccd图像传感器(204)位于导向锥台(202)端面,移动滑块(201)后端面上设有伸缩驱动杆(208)。6.根据权利要求5所述的一种变电站巡检机器人自动识别定位充电装置,其特征在于,所述的移动滑块(201)两侧面设有导向滑台(206)和充电杆(207),导向滑台(206)与支架(3)滑动连接,充电杆(207)与两侧的导电滑轨(4)滑动接触。7.根据权利要求5所述的一种变电站巡检机器人自动识别定位充电装置,其特征在于,所述的导向锥台(202)上设有磁环(205)。8.根据权利要求6所述的一种变电站巡检机器人自动识别定位充电装置,其特征在于,所述的支架(3)包括伸缩槽(31),伸缩槽(31)两侧壁上设有滑槽(32),导向滑台(206)和滑槽(32)滑动连接。
技术总结
一种变电站巡检机器人自动识别定位充电装置,包括充电桩和伸缩充电插头机构,伸缩充电插头机构与支架滑动连接,充电桩上设有激光模块,伸缩充电插头机构上设有CCD图像传感器,由激光模块射出激光被CCD图像传感器接收后形成图像进行处理后判断伸缩充电插头机构和充电桩是否对准,判断对准后通过伸缩充电插头机构的伸缩实现充电。通过充电桩上的激光模块发出激光,激光通过导光管的导向后聚拢并射向CCD图像传感器上,CCD图像传感器接收激光点图像并与预设的标准图像进行比对,以判断充电装置是否达到充电位置,然后通过充电装置的伸缩和锥孔的导向实现精准充电动作,本装置结构简单,可靠性高,适合在机器人领域推广使用。适合在机器人领域推广使用。适合在机器人领域推广使用。
技术研发人员:王方政 邹祖冰 于傲 张亚平 刘喜泉 王罗 汤鹏 孙勇
受保护的技术使用者:中国长江三峡集团有限公司
技术研发日:2021.05.24
技术公布日:2021/12/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1