用于毫米波应用的高性能锁相环的制作方法
用于毫米波应用的高性能锁相环
1.相关申请的交叉引用
2.本技术要求于2020年12月24日提交的美国临时专利申请号63/130,440的优先权,其全部内容通过引用整体并入本文。
技术领域
3.本公开涉及锁相环领域,并且具体地涉及用于生成毫米波雷达应用中使用的啁啾的锁相环。
背景技术:
4.雷达系统,诸如在汽车和工业应用中使用的雷达系统,通过传输被其路径中的物体反射的电磁信号来操作。通过检测物体反射的那些电磁信号,雷达系统可以确定这些物体的距离、速度和角度。
5.毫米波(mmwave)雷达是使用短波长电磁波的一类特殊的雷达技术。完整的毫米波雷达系统包括发射(tx)和接收(rx)射频(rf)组件、时钟生成组件和数字组件,诸如模数转换器(adc)、微控制器(mcu)和数字信号处理器(dsp)。
6.如前所述,雷达系统的基本概念是传输其路径中的物体反射的电磁信号。在毫米波雷达使用的信号中,所发射的电磁信号的频率随时间线性增加。该类型的信号被称为“啁啾”。
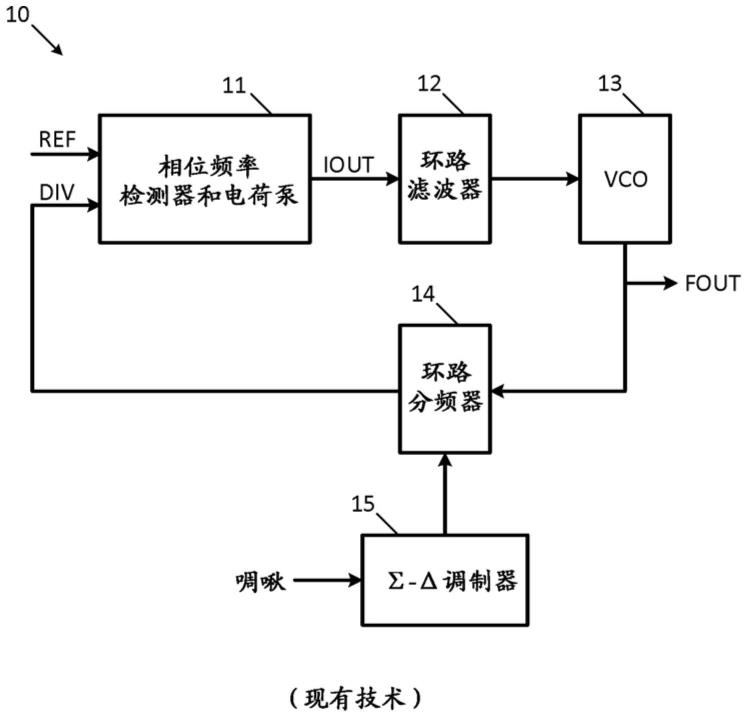
7.可以被用于为毫米波雷达生成啁啾的已知锁相环(pll)10在图1中示出。pll包括相位频率检测器和电荷泵电路11,电荷泵电路11接收参考信号ref和分频反馈信号div、比较两者之间的相位并且基于此而生成电荷泵输出信号iout信号。电荷泵输出信号iout经环路滤波器12滤波之后,被用于生成控制电压来设置压控振荡器(vco)13的频率,压控振荡器为pll产生输出信号fout。环路分频器14将输出信号fout除以随时间变化的值,所述值由∑-δ调制器15提供,以产生分频反馈信号div。相位频率检测器和电荷泵11调整电荷泵输出信号iout,使得最终分频反馈信号div与参考信号ref同相,从而意味着分频反馈信号div在频率上也与参考信号ref相等。由于如所解释的,分频器值在∑-δ调制器15的控制下随时间变化,电荷泵输出信号iout同样随时间变化,以如所解释的,保持分频反馈信号div锁定到参考信号ref,其中结果是输出信号fout的频率斜坡。为了执行回扫(将输出信号fout的频率重置为原始值,以开始另一啁啾),分频器值将被重置为其初始值。
8.如图2所示是啁啾频率随时间变化的曲线图。啁啾由在时间段t_ramp内发生的斜坡时段chirp_ramp和在时间段t_retrace内发生的回扫时段chirp_retrace来限定。斜坡时段的特征在于起始频率f0和结束频率ff,它们一起限定了啁啾的带宽bw。斜坡时段期间的啁啾斜率表示频率的变化率。可以看出,回扫时段可能是有问题的,因为频率从结束频率ff快速下降返回到起始频率f0会导致过冲。该过冲的带宽由图2中的f_ost表示。由于过冲增加了必要的回扫时段的持续时间(因为系统需要从过冲中恢复),所以需要消除过冲,使得回扫时段的持续时间可以被减少,从而允许增加占空比或占空比频率。附加地,期望斜坡时段
期间的啁啾足够线性,并且电荷泵噪声、∑-δ调制器噪声和参考信号噪声被过滤。
9.然而,为了增加斜坡斜率、降低回扫时间并获得良好的线性度,pll 10的带宽应增加,同时为了滤除电荷泵噪声、∑-δ调制器噪声和参考信号噪声,pll 10的带宽应被减小。这些相互矛盾的要求使得已知的用于生成啁啾的pll(诸如pll 10)是不够的。因此,需要进一步的开发。
技术实现要素:
10.本文公开了一种锁相环,锁相环包括输入比较电路,输入比较电路被配置为将参考信号与分频反馈信号进行比较,并且基于该比较来生成至少一个电荷泵控制信号。锁相环还包括:被配置为响应于至少一个电荷泵控制信号而生成电荷泵输出信号的电荷泵、开关和环路滤波器,环路滤波器被耦合为在开关闭合时接收电荷泵输出信号并且被配置为对电荷泵输出信号进行滤波来产生振荡器控制信号。振荡器被配置为响应于振荡器控制信号而生成输出信号。分频器电路装置被配置为通过除数来将输出信号分频,以产生分频反馈信号。除数生成电路装置被配置为随时间改变除数,使得分频反馈信号的频率随时间从第一频率变为第二频率,其中分频反馈信号的频率具有第一频率,导致输出信号的频率具有起始斜坡频率,并且分频反馈信号的频率具有第二频率,导致输出信号的频率具有结束斜坡频率。振荡器控制信号修改电路装置存储第一振荡器控制信号,其中当输出信号的频率是起始斜坡频率时,第一振荡器控制信号等于振荡器控制信号的值。当输出信号的频率达到结束斜坡频率时,开关断开,并且所存储的第一振荡器控制信号被施加到环路滤波器,从而将输出信号的频率下降至起始斜坡频率。
11.在本文中公开了另一锁相环,并且另一锁相环包括输入比较电路,输入比较电路被配置为将参考信号与分频反馈信号进行比较,并且基于此生成至少一个电荷泵控制信号。该锁相环还包括:被配置为响应于至少一个电荷泵控制信号而生成电荷泵输出信号的电荷泵、被耦合来接收电荷泵输出信号并且对电荷泵输出信号进行滤波来产生振荡器控制信号的环路滤波器、被配置为响应于振荡器控制信号而生成输出信号的压控振荡器(vco)、被配置为通过除数对输出信号进行分频以产生分频反馈信号的分频器电路装置、以及除数生成电路装置。除数生成电路装置被配置为:在斜坡时段期间,随时间改变除数,使得分频反馈信号的频率随时间从第一频率变为第二频率,其中分频反馈信号的频率具有第一频率,导致输出信号的频率具有起始斜坡频率,并且分频反馈信号的频率具有第二频率,导致输出信号的频率具有结束斜坡频率;以及在回扫期间,随时间改变除数,使得分频反馈信号的频率根据一阶指数衰减而随时间从第二频率返回到第一频率。
12.本文还公开了雷达设备。雷达设备包括发射器天线、被配置为生成供发射器天线传输的rf信号的合成器、被配置为接收经反射的rf信号的接收器天线、以及被配置为接收由合成器生成的rf信号和经反射的rf信号并基于此生成中频信号的混频器。雷达设备还包括:模数转换器,其被配置为将中频信号数字化;以及处理电路,其被配置为基于中频信号来确定雷达设备与反射经反射的rf信号的外部物体之间的距离。合成器包括上述锁相环中的任一锁相环,以及接收输出信号并且被配置为基于此来生成rf信号的rf乘法器。
附图说明
13.图1是可用于毫米波雷达系统的已知锁相环的框图。
14.图2是示出了在毫米波雷达系统中使用的由斜坡时段和回扫时段组成的啁啾的曲线图。
15.图3是本文所公开的毫米波雷达系统的框图。
16.图4是本文所公开的可与图3的毫米波雷达系统一起使用的锁相环的第一实施例的框图。
17.图5是图4的锁相环的vco控制信号存储/恢复电路的第一实施例的框图。
18.图6是图4的锁相环的vco控制信号存储/恢复电路的第二实施例的框图。
19.图7是当使用图4的锁相环时,使用图3的毫米波雷达系统生成的啁啾的曲线图。
20.图8是在不同的回扫策略的情况下,使用图3的毫米波雷达系统生成的啁啾的回扫时段的放大图。
21.图9是本文所公开的可与图3的毫米波雷达系统一起使用的锁相环的第二实施例的框图。
22.图10是当使用图9的锁相环时,使用图3的毫米波雷达系统生成的两个啁啾的曲线图。
23.图11是本文所公开的锁频环的第一实施例的框图。
24.图12是本文所公开的锁频环的第二实施例的框图。
具体实施方式
25.以下公开内容使得本领域技术人员能够制造和使用本文所公开的主题。在不脱离本公开的精神和范围的情况下,本文描述的一般原理可以被应用于除了上面详述的那些之外的实施例和应用。本公开不旨在限于所示的实施例,而是符合与本文所公开或建议的原理和特征一致的最宽范围。
26.最初参考图3,现在描述毫米波雷达系统20。毫米波雷达系统20包括合成器21,合成器21包括锁相环(pll),以生成待由发射器天线22发射的毫米波啁啾。注意,毫米波啁啾也被传递到混频器23。啁啾从发射器天线22向外发射,发射器天线22在并入毫米波雷达系统的设备(例如,车辆或移动工业设备)的行进路径中,并且啁啾从设备行进路径中的物体反射。反射由接收器天线24接收,并且产生的信号被传递到混频器23,混频器23将输出的毫米波啁啾和输入的反射混频,以形成中频(if)信号。if信号由低通滤波器(lpf)25滤波并且由模数转换器(adc)26数字化。
27.如本领域技术人员所理解的,根据if信号和发射啁啾的已知性质,到反射啁啾的物理的距离可以通过接收数字化的if信号的处理电路27来从数学上计算。在某些情况下,通过分析两个单独的if信号脉冲,也可以计算该物体的速度。如果多个接收天线被使用,则物体与并入毫米波雷达系统20的设备的角度可以被确定。
28.特别是在毫米波雷达系统20的车辆和工业应用的情况下,需要将低pll带宽在生成啁啾(其具有滤除电荷泵噪声、∑-δ调制器噪声和参考信号噪声的效果)时的效果与高pll带宽(具有提供良好线性度、高斜坡斜率和低回扫时间的效果)的效果进行组合。为了从看似矛盾的设计要求中实现这些效果,已设计了新的pll 30用于合成器21中,并且现在将
参考图4来描述这样的pll 30。
29.pll 30包括相位频率检测器(pfd)31,相位频率检测器(pfd)31接收参考信号ref和分频反馈信号div,并且基于ref和div的相位之间的比较来生成用于电荷泵32的控制信号up、dn。电荷泵32基于控制信号up、dn而生成电荷泵输出信号iout,电荷泵输出信号iout然后通过开关s1而选择性地传递通过低通滤波器(lpf)33,以产生用于压控振荡器(vco)34的控制信号vcont。
30.vco 34基于控制信号vcont而生成输出信号fout。射频(rf)乘法器35基于输出信号fout而生成待由发射器天线22发射的啁啾。
31.输出信号fout还传递通过固定分频器36和可编程分频器37来产生分频反馈信号div。注意,调制器38还接收分频反馈信号div,并且将其输出传递通过数字反相/预加重滤波器39,以向∑-δ调制器40提供输入。∑-δ调制器40控制由可编程分频器37使用的除数,并且可以向电荷泵32提供控制信号来帮助减少量化噪声。与消除∑-δ调制量化噪声有关的更多详细信息请参见ieee journal of solid-state circuits中,2004年9月第9期第39卷,由temporiti等人提交的题为“a 700-khz bandwidth∑-δfractional synthesizer with spurs compensation and linearization techniques for wcdma applications”的文章,其内容通过引用整体并入。
32.电荷泵输出信号iout以及因此控制信号vcont旨在将输出信号fout的频率设置为使得分频反馈信号div的相位(因此频率)等于参考信号ref的频率。数字反相/预加重滤波器39将适当的预加重添加到来自调制器38的输出,以导致∑-δ调制器40将可编程分频器37的除数斜坡,进而迫使pfd 31引起输出信号fout的频率增加,从而在斜坡时段期间生成啁啾频率的斜坡。这允许啁啾的带宽保持较低,以将噪声最小化。
33.为了确定数字反相/预加重滤波器39的传递函数,pll 30的模型在拉普拉斯域中生成,然后被变换到z域。根据z域中的pll 30的模型,数字反相/预加重滤波器39的传递函数可以如本领域技术人员所理解的那样适当地确定。
34.注意电路29的存在,其用于在斜坡时段开始时存储vco控制信号vcont的值(例如,保存导致fout的频率被生成为f0的vcont的值)。在斜坡时段结束时(在啁啾回扫时段开始时),环路通过断开开关s1(可以由电路29执行)而断开,并且电路29恢复vcont的存储值(例如,通过将所保存的vcont的值强制用于lpf 33的输出),导致斜坡快速下降回到f0。环路然后通过闭合开关s1而闭合,并且输出信号fout被允许在下一斜坡时段开始之前稳定。该技术提供了无过冲的快速回扫,有助于消除回扫期间因fout频率的大负斜率引起的周跳(cycle slipping)的可能性,并且有助于改进斜坡时段期间的啁啾。
35.如图5所示是电路29的一个可能配置。电路29可以包括计数器29a、数字处理块29b(例如,利用查找表的微控制器或微处理器)和电压数模转换器(dac)29c。在开关s1断开的初始配置阶段期间,计数器29a测量fout的频率,而数字处理块29b借助电压dac 29c来迫使不同的电压通过lpf 33,以产生不同的vcont值。由此,数字处理块29b形成dac代码的查找表,其中每个dac代码对应于由将该dac代码应用于电压dac 29c而产生的fout频率(因此导致vcont的不同值,并且因此对于每个dac代码fout的频率不同)。然后开关s1闭合,以使得计数器29a测量在斜坡时段开始时作为f0生成的fout频率。由此,数字处理块29b现在知道在斜坡时段结束时(回扫时段开始)将哪个dac代码强加到电压dac 29c上。附加地,计数器
29a可以测量作为频率ff生成的fout频率。
36.为了利用电路29的该配置,一旦查找表在配置阶段中建立并且用于回扫的dac代码已确定,则毫米波雷达系统20和pll 30被激活并且开关s1闭合。
37.在斜坡时段结束时(在啁啾的回扫时段开始时),这可以例如通过计数器29a测量的fout的频率并达到在校准阶段确定的频率ff来确定,环路通过断开开关s1(在电路29、特别是数字处理块29b的控制下)而断开,并且数字处理块29b在电压dac 29c的输入上强制先前确定的回扫dac代码。该电压dac 29c输出传递通过lpf 33,以生成vcont的值,以供vco 34用于开始回扫,从而导致啁啾快速下降回到f0。环路然后通过闭合开关s1(在电路29的控制下)而闭合,并且输出信号fout被允许在下一斜坡使得开始之前稳定。
38.如图6所示是电路29’的另一可能配置。电路29’可以包括模数转换器(adc)29a’,模数转换器(adc)29a’在斜坡时段开始时将电荷泵输出iout(导致fout的频率为f0)数字化,然后在斜坡时段结束时(一旦开关s1已断开)可选地借助如上所述控制开关s1的数字处理电路装置29b,将该数字值输出到数模转换器(dac)20b’,数模转换器20b’将该数字值转换回模拟电流并且强制lpf 33输入上的该电流生成vcont的值,以供vco 34用于开始回扫,从而导致啁啾快速下降回到f0。环路然后通过闭合开关s1而闭合,并且输出信号fout被允许在下一斜坡时段开始之前稳定。注意,对于该实施例,与图5的实施例相反,f0的值可以逐周期地或周期性地重新确定,从而帮助提供对温度范围内的啁啾的精确跟踪。
39.由pll 30提供的性能可以在图7中看到,其中它实现了2.75μs的回扫时间、10μs的斜坡时段、
±
0.25%内的线性度、小于1mhz的过冲和大约200khz的带宽。该性能是现有技术设计无法实现的,从而为毫米波系统20提供了无与伦比的性能。
40.在某些情况下,可能期望牺牲pll 30的少量精确和稳健的性能,以换取实现成本较低的pll,该pll消耗更少的面积但仍然实现足够好的性能以用于毫米波系统20。参考图8,注意在回扫时段期间(其时间间隔被示出为t_reset),啁啾的频率从其高值ff下降到其低值f0。如果像现有技术系统那样除数被简单地重置为其初始值,那么由此产生的啁啾频率的下降斜坡(被示出为“斜坡重置”)将导致不希望的过冲量。另一构思是在回扫时段期间(被示出为两点重置)改变啁啾频率下降斜坡的斜率。虽然这确实减少了过冲,但是过冲的量仍然是不合需要的。已发现并且现在将在本文中描述,当回扫时段期间啁啾频率的向下斜坡的斜率以一阶指数方式减小时,过冲被消除。
41.现在参考图9来描述并入该功能的锁相环(pll)30’。pll 30’包括相位频率检测器和电荷泵51,其接收参考信号ref和分频反馈信号div、比较两者之间的相位并且基于此来生成电荷泵输出信号iout信号。在由环路滤波器52滤波之后,电荷泵输出信号iout被用于设置为pll产生输出信号fout的压控振荡器(vco)53的频率。输出信号fout被馈送到rf乘法器54,rf乘法器54进而生成用于由发射器天线22发射的rf信号。环路分频器55通过随时间变化的值而将输出信号fout分频,所述值由∑-δ调制器62提供,以产生分频反馈信号div。相位频率检测器和电荷泵51将电荷泵输出信号iout调整为使得最终,分频反馈信号div与参考信号ref同相,这意味着分频反馈信号div在频率上也与参考信号ref相等。由于分频器值在∑-δ调制器62的控制下随时间变化,如所解释的,电荷泵输出信号iout同样随时间变化,以保持分频反馈信号div锁定到参考信号ref,如所解释的,其中结果是输出信号fout斜坡。
42.现在描述∑-δ调制器62的输入的生成。在斜坡时段t_ramp期间,斜坡发生器60的输出由多路复用器61选择并且被提供给∑-δ调制器62的输入,以随时间增加∑-δ调制器62的除数来实现啁啾的频率在斜坡时段内的期望斜坡。
43.在回扫时段t_retrace期间,重置计数器56(意味着它从起始值计数到期望的结束值,并且一旦达到结束值就被重新设置回起始值)向查找表57提供输出。查找表在某些情况下,可能具有低精度部分(例如,条目的前3/4可能是6位)和高精度部分(例如,条目的最后1/4可能是10位)。根据从重置计数器56接收的计数值,查找表57将适当表条目处存储的值输出到插值电路58,插值电路58将插值之后的结果传递到功能区块59,功能区块59实现函数n
l
+bw*fd(x),其中n
l
是斜坡的最低频率,bw=f
f-f0(ff是斜坡的最高频率),并且fd(x)是查找表57在插值电路58插值之后的输出。功能区块59的输出(数学上,fd(x))在回扫期间由多路复用器61选择,并且被传递到∑-δ调制器62作为输入,以实现具有第一阶指数衰减的啁啾斜率。
44.在一些情况下,插值块58的处理在一个时间段内有效地“保持”每个样本,从而增加该样本影响∑-δ调制器62的输出的时间段。这可以增加应用所需要的回扫时间。
45.多路复用器61由控制块66控制,控制块66基于每个的输出来选择斜坡发生器60的输出或功能区块59的输出。重置计数器由控制块66也基于斜坡发生器60的输出和功能区块59的输出来重置。
46.输出信号fout可以在图10中看到。在没有太多过冲的情况下,注意,回扫期间输出信号fout的频率的受控指数衰减。注意,斜坡时段期间的高度线性。本实施例中的回扫时间为3.5μs,过冲小于0.25mhz。
47.请注意,虽然图3和图9的两个实施例已参考从低频到高频的啁啾斜坡以及从高频到低频的啁啾回扫进行了描述,但是任一实施例均可以被清楚地布置为执行相反的操作,其中啁啾斜坡从高频到低频并且啁啾回扫从低频到高频。
48.虽然上述实施例30和30’已被描述为被布置为锁相环,但是应理解,实施例30和30’均可以被布置为锁频环。
49.在如图11所示的锁频环(fll)30”的情况下,它具有与图4的pll 30相同的设计和操作,不同之处在于相位频率检测器31已被频率检测器31”替换。频率检测器31”不是基于参考信号ref和分频反馈信号div的相位是否匹配来生成控制信号up和dn,而是基于参考信号ref和分频反馈信号div的频率是否匹配来生成控制信号up和dn。本领域技术人员将理解,如果两个信号相位匹配,则它们在频率上匹配,但是如果两个信号频率匹配,则它们不一定在相位上匹配。
50.在如图12所示的fll 30
”’
的情况下,它具有与图9的pll 30’相同的设计和操作,不同之处在于相位频率检测器和电荷泵51已被替换为频率检测器和电荷泵51
”’
。频率检测器和电荷泵51
”’
不是基于参考信号ref的相位与分频反馈信号div的相位是否匹配来生成电荷泵输出信号iout,而是基于参考信号的频率ref和分频反馈信号div的频率是否匹配来生成电荷泵输出信号。
51.上述锁频环实施例在不需要锁相环的一些应用中或在仅锁频就足够的一些应用中是有用的。
52.虽然已关于有限数量的实施例描述了本公开,但是受益于本公开的本领域技术人
员将理解,可以设想不脱离如本文所公开的本公开的范围的其他实施例。因此,本公开的范围应仅由所附权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1