一种基于ROS的移动式图像数据采集装置的制作方法
一种基于ros的移动式图像数据采集装置
技术领域
1.本实用新型涉及一种图像数据采集装置,尤其是涉及一种基于ros的移动式图像数据采集装置。
背景技术:
2.公知的,现有鸡舍病鸡死鸡检测主要通过人工巡查,劳动强度大,检出率低。死鸡检测相对容易,但病鸡检测主要依靠工人经验,且很容易出现漏判,长时间高强度的工作也影响巡查结果。且对于患病初期的病鸡,由于症状不明显人工很难发现,而早期病鸡的检出又尤为重要,可以有效预防疾病在鸡群中的传播,降低鸡群大面积感染的风险;因此,提出一种能够分析对比鸡活跃度的移动式图像数据采集装置,成为本领域技术人员的基本诉求。
技术实现要素:
3.为了克服背景技术中的不足,本实用新型公开了一种基于ros的移动式图像数据采集装置。
4.为了实现所述发明目的,本实用新型采用如下技术方案:
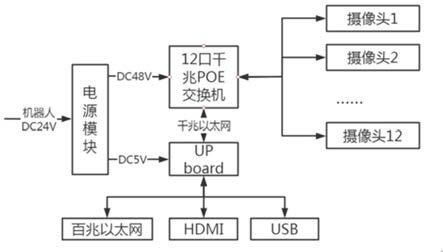
5.一种基于ros的移动式图像数据采集装置,包括采集模块和搭载采集模块的巡检机器人,采集模块包括设置在壳体内的电源模块、交换机和up board主控板,电源模块分别与交换机、up board主控板通过电源线连接,交换机为千兆poe交换机,且通过网线插口与外部的多个摄像头连接,多个摄像头均通过角度调节组件安装在巡检机器人顶部的立柱上,up board主控板与交换机通过千兆以太网连接,up board主控板通过无线网络与巡检机器人及控制中心通讯。
6.所述的基于ros的移动式图像数据采集装置,角度调节组件设置有多个,且沿立柱的长度方向上从上至下依次间隔设置,其包括固定座和分别设置在固定座两侧的调节板,固定座由一侧抱箍和另一侧抱箍组成,一侧抱箍和另一侧抱箍通过外圆面上的螺栓抱紧在立柱的外部,一侧抱箍和另一侧抱箍相对应的外面两边均设有延伸的u形座;调节板设置为t形,在其后面板的两边上延伸设有延伸板,延伸板分别插设在一侧抱箍、另一侧抱箍的u形座内,并通过转轴转动连接,多个摄像头分别固定在调节板的上面。
7.所述的基于ros的移动式图像数据采集装置,在up board主控板上还设有百兆以太网插口设置一个、hdmi插口设置一个、usb插口四个。
8.由于采用了上述技术方案,本实用新型具有如下有益效果:
9.本实用新型所述的基于ros的移动式图像数据采集装置,通过将采集模块搭载在巡检机器人上,通过设置千兆poe交换机及up board主控板,将摄像头采集到的图像信息传输到交换机内,并通过千兆以太网送至up board主控板,up board主控板通过无线网络与机器人和控制中心通讯,获取机器人状态,将摄像头采集到的图像信息与机器人的位置及时间信息整合后存储在本地,待机器人返回控制中心后回传至控制中心;设置角度调节组
件安装摄像头,拍摄的效果更好;本实用新型结构简单、使用方便,通过图像的高清传输,能够提高病鸡检出率,发现早期病鸡,从而降低鸡群大面积感染的风险。
附图说明
10.图1是本实用新型的结构原理图。
11.图2是本实用新型的摄像头设置在巡检机器人立柱上的结构示意图。
12.图3是本实用新型角度调节组件的结构示意图。
13.图中:1、立柱;2、摄像头;3、固定座;4、调节板;5、延伸板;6、转轴;7、u形座;8、一侧抱箍;9、另一侧抱箍;10、螺栓。
具体实施方式
14.通过下面的实施例可以详细的解释本实用新型,公开本实用新型的目的旨在保护本实用新型范围内的一切技术改进。
15.结合附图1-3基于ros的移动式图像数据采集装置,包括采集模块和搭载采集模块的巡检机器人,采集模块包括设置在壳体内的电源模块、交换机和up board主控板,电源模块分别与交换机、up board主控板通过电源线连接,交换机为千兆poe交换机,且通过网线插口与外部的多个摄像头2连接,多个摄像头2均通过角度调节组件安装在巡检机器人顶部的立柱1上,up board主控板与交换机通过千兆以太网连接,up board主控板通过无线网络与巡检机器人及控制中心通讯。
16.所述的基于ros的移动式图像数据采集装置,角度调节组件设置有多个,且沿立柱的长度方向上从上至下依次间隔设置,其包括固定座3和分别设置在固定座3两侧的调节板4,固定座3由一侧抱箍8和另一侧抱箍9组成,一侧抱箍8和另一侧抱箍9通过外圆面上的螺栓10抱紧在立柱1的外部,一侧抱箍8和另一侧抱箍9相对应的外面两边均设有延伸的u形座7;调节板4设置为t形,在其后面板的两边上延伸设有延伸板5,延伸板5分别插设在一侧抱箍8、另一侧抱箍9的u形座7内,并通过转轴6转动连接,多个摄像头2分别固定在调节板4的上面。
17.所述的基于ros的移动式图像数据采集装置,在up board主控板上还设有百兆以太网插口设置一个、hdmi插口设置一个、usb插口四个,便于连接鼠标、键盘、显示器等外设,方便用户操作。
18.实施本实用新型所述的基于ros的移动式图像数据采集装置,所述采集模块基于ros系统,可方便的搭载于基于ros的巡检机器人上,电源模块将巡检机器人提供的dc24v转换为本模块需要的dc48v、dc5v,千兆poe交换机为12口千兆poe交换机,由电源模块的dc48v供电,由于配置有poe功能,只需一根网线即可实现对摄像头2的供电和图像数据的传输,方便布线也可减轻机器人重量,延长续航;up board主控板通过无线网络与机器人和控制中心通讯,获取机器人状态,将摄像头采集到的图像信息与机器人的位置及时间信息整合后存储在本地,待巡检机器人返回控制中心后回传至控制中心;
19.由于鸡舍环境偏暗、鸡笼网格的遮挡,所述的摄像头2选用曝光可调高清摄像头,为了不影响正常拍摄,摄像头2的拍摄角度均可由转轴6调节调节板4的位置;角度调节组件设置的个数由鸡笼的层数决定,每层鸡笼对应设置一个角度调节组件,且在角度调节组件
的两侧分别各安装一个摄像头,每个摄像头的拍摄张数和拍摄的间隔时间,由up board主控板设定的作业任务决定,可以依次开启对应的摄像头按照拍摄策略进行拍摄,up board主控板通过服务机制告知机器人当前位点采集已完成,可由机器人综合判断是否继续前往下一位点;
20.本实用新型未详述部分为现有技术。
21.为了公开本实用新型的发明目的而在本文中选用的实施例,当前认为是适宜的,但是,应了解的是,本实用新型旨在包括一切属于本构思和实用新型范围内的实施例的所有变化和改进。
技术特征:
1.一种基于ros的移动式图像数据采集装置,包括采集模块和搭载采集模块的巡检机器人,其特征是:采集模块包括设置在壳体内的电源模块、交换机和up board主控板,电源模块分别与交换机、up board主控板通过电源线连接,交换机为千兆poe交换机,且通过网线插口与外部的多个摄像头连接,多个摄像头均通过角度调节组件安装在巡检机器人顶部的立柱上,up board主控板与交换机通过千兆以太网连接,up board主控板通过无线网络与巡检机器人及控制中心通讯。2.根据权利要求1所述的基于ros的移动式图像数据采集装置,其特征是:角度调节组件设置有多个,且沿立柱的长度方向上从上至下依次间隔设置,其包括固定座和分别设置在固定座两侧的调节板,固定座由一侧抱箍和另一侧抱箍组成,一侧抱箍和另一侧抱箍通过外圆面上的螺栓抱紧在立柱的外部,一侧抱箍和另一侧抱箍相对应的外面两边均设有延伸的u形座;调节板设置为t形,在其后面板的两边上延伸设有延伸板,延伸板分别插设在一侧抱箍、另一侧抱箍的u形座内,并通过转轴转动连接,多个摄像头分别固定在调节板的上面。3.根据权利要求1所述的基于ros的移动式图像数据采集装置,其特征是:在up board主控板上还设有百兆以太网插口设置一个、hdmi插口设置一个、usb插口四个。
技术总结
一种基于ROS的移动式图像数据采集装置,涉及一种图像数据采集装置,包括采集模块和搭载采集模块的巡检机器人,采集模块包括设置在壳体内的电源模块、交换机和UP board主控板,电源模块分别与交换机、UP board主控板通过电源线连接,交换机为千兆POE交换机,且通过网线插口与外部的多个摄像头连接,多个摄像头均通过角度调节组件安装在巡检机器人顶部的立柱上,UP board主控板与交换机通过千兆以太网连接,UP board主控板通过无线网络与巡检机器人及控制中心通讯;本实用新型结构简单、使用方便,通过图像的高清传输,能够提高病鸡检出率,发现早期病鸡,从而降低鸡群大面积感染的风险。险。险。
技术研发人员:刘博 刘青松 桂武通 马勇 莫超成 张明树
受保护的技术使用者:北京拓博尔机器人科技有限公司
技术研发日:2021.12.07
技术公布日:2022/5/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1