一种可实现子弹目标探测的头盔系统的制作方法
[0001]
本发明涉及一种可实现子弹目标探测的头盔系统,尤其涉及一种通过感应电荷量变化实现子弹运动速度和方向测量的头盔系统。
背景技术:
[0002]
在现代军事行动中,战场上保护士兵的安全已经成为非常重要的事情之一。而当与敌军交火或者遇到伏击时,快速准确的确定枪声来源以及敌方射手方位,就可以及时的对危险做出响应,为快速寻找掩体进行反击提供了宝贵的参考信息,因此子弹探测装置的开发在军事领域意义重大。
[0003]
目前有很多国家已经开发出火力感知系统,按照原理可主要分为声学、雷达、红外光学等探测机理,但以上实现方法又都有不同程度的缺陷。声学麦克风阵列子弹探测系统为目前发展最为成熟的子弹探测系统,基于子弹出膛产生的爆轰波与马赫波确定射手方位,但是它无法用于识别亚音速弹丸、消音武器、嘈杂的战场环境等情况,同时也不宜检测多火力并发情况;基于雷达的子弹探测系统,通过主动雷达高频扫描探测子弹位置形成子弹路径,所以其设备复杂、功耗高,会导致设备巨大等缺陷,无法小型化便于单兵携带;而红外光学子弹探测系统,通过子弹出膛时发出的红外信息进行检测,对视野要求非常高,不宜用于雨雾等恶劣天气,且不抗遮挡。
[0004]
基于电场的子弹探测系统,基于弹丸飞行过程中产生的电场进行检测,目前该方法的相关研究很少,已有研究中只能实现子弹运动角度的粗略检测,精度30度,无法实现精确测量。为此,需要提出一种子弹目标探测方法,可克服环境音影响、便携、不受光线和遮挡影响,且可实现子弹方向精确检测。
技术实现要素:
[0005]
为了克服上述现有技术中的不足,本发明提出一种通过感应电荷量变化实现子弹运动速度与方向探测的头盔系统。
[0006]
为实现上述发明目的,本发明提出的技术方案为:
[0007]
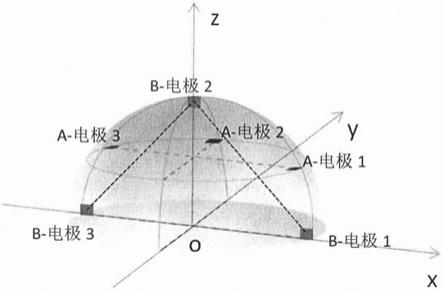
一种可实现子弹目标探测的头盔系统,包括六个探测电极、放大调理电路以及fpga处理模块,其特征在于,六个电极在头盔上分为a、b两组分布,若以头盔半球心为原点,底面为xoy平面建立三维直角坐标系,则a组的3个水平电极位于头盔中部平行于xoy平面放置,b组的3个垂直电极于xoz平面放置,同一平面的电极连线为等腰直角三角形,六个金属探测电极同时感应子弹经过时电荷量的变化,并分别接入放大调理电路;放大调理电路包括电荷传感器和放大滤波电路,将电极上感应的电荷量转换成电压量输出至fpga处理模块;fpga处理模块采集和测量a、b两组电极放大调理后的输出电压波形,通过其过零点和峰谷值之间的时间差计算得到子弹运动的水平和垂直分速度大小和方向,最终可计算出合成速度大小和方向。
[0008]
进一步地,头盔为半球形,半径为0.1m-0.2m。
[0009]
进一步地,b组的三个垂直电极与y轴的距离约为头盔半球的半径,即b组的3个垂直电极连线的斜边大小约为头盔半球的直径;a组的3个水平电极所在平面位于头盔中部,a组电极与z轴的距离约为头盔半球的半径。
[0010]
进一步地,六个电极材质、大小、面积均一样,材质为铜、铝、锡等金属材质,形状可为圆形、方形等,大小为1cm
2-5cm2。
[0011]
一种可实现子弹目标探测的头盔系统,其特征在于,子弹目标的运动速度和方向测量,具体包括如下步骤:
[0012]
1)在头盔上设置a、b两组共六个金属探测电极,每组3个电极位于同一平面且连线为等腰直角三角形。若以头盔半球心为原点,底面为xoy平面建立三维直角坐标系,则a组的3个水平电极位于头盔中部平行于xoy平面放置,电极与z轴距离为d
a
;b组的3个垂直电极于xoz平面放置,电极与y轴距离为d
b
;
[0013]
2)将六个金属电极分别接入放大调理电路,并和fpga处理模块连接;
[0014]
3)a、b两组电极分别以各自的电极平面为xoy平面建立独立直角坐标系,处理模块分别测出相应电荷传感器a、b两组电极放大调理后的输出波形的过零点t
i1
、t
i2
、t
i3
,其中i=a,b;
[0015]
4)根据过零点和时间差可分别计算出a、b两组电极平面的子弹运动分速度方向,即运动路径投影和各自坐标系x轴的夹角θ
i
,其中i=a,b:
[0016][0017]
(t
i1
<t
i2
,-π/2≤θ
i
<π/2;t
i1
>t
i2
,π/2≤θ
i
<3π/2)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0018]
5)子弹的运动速度分量大小v
i
可由运动方向θ
i
、过零点t
i1
、t
i2
、t
i3
得到,其中i=a,b:
[0019][0020]
6)将坐标变换至头盔坐标系,则可得子弹在各平面速度分量的向量为:
[0021][0022][0023]
总速度为:
[0024][0025][0026]
则速度方向在头盔坐标系xoy平面的投影与x轴的夹角为:
[0027][0028]
在头盔坐标系xoz平面的投影与x轴的夹角为:
[0029][0030]
本发明方法的显著特征在于利用集成于头盔上的六个电极来感应电荷变化,在水平和垂直方向分别检测子弹运动波形的特征信息来实现子弹运动速度及方向测量,只需依靠时间差信息,无需精确测定幅值,具有算法简单、易实现、精度高、低成本等显著优点,且该装置的测速范围大,可以弥补声学无法探测消音武器、亚音速弹丸的缺陷,探测装置体积小巧,集成在头盔上便于单兵佩戴,对天气、视野等没有苛刻的要求,适用于恶劣天气或黑暗环境。
附图说明
[0031]
图1为头盔系统模型图。
[0032]
图2为子弹在空间中的运动路径及投影示意图,a)头盔坐标下的运动路径,b)运动路径在xoy平面的投影,c)运动路径在xoz平面的投影。
[0033]
图3为子弹经过时a、b两组电极上放大调理后的输出波形,a)a组3个电极的输出波形,b)b组3个电极的输出波形。
具体实施方式
[0034]
为进一步详细表述本发明的效果,假设一子弹的相关参数为:q0=10-9
c,v=1000m/s,下面将结合这一具体的子弹运动速度与方向探测的实施例对本发明做说明,具体如下:
[0035]
1)半径为0.1m的半球形头盔上设有a、b两组共六个铜探测电极,电极为方形,边长为0.01m,每组3个电极位于同一平面且连线为等腰直角三角形,若以头盔半球心为原点,底面为xoy平面建立三维直角坐标系,则a组的3个水平电极位于头盔中部平行于xoy平面放置,电极与z轴距离d
a
为0.07m;b组的3个垂直电极于xoz平面放置,电极与y轴距离d
b
为0.1m,如附图1所示;
[0036]
2)将六个铜电极分别接入放大调理电路,并和fpga处理模块连接,电荷传感器的输入电容c
i
均为10pf;
[0037]
3)在头盔坐标系下,假设子弹运动路径所在直线为:
[0038][0039]
则该速度方向在头盔坐标系xoy平面的投影与x轴的夹角为θ1=68.199
°
,分速度大小v
a
=873.589m/s;速度方向在头盔坐标系xoz平面的投影与x轴的夹角为θ2=56.310
°
,分速度大小v
b
=584.898m/s;子弹在空间中的运动路径示意图如附图2所示;
[0040]
采用matlab对上述路径下观测面各电极输出信号进行仿真,得到的a、b两组三个电极上的输出波形如附图3所示,分别读取a、b两组3个电极上输出信号的过零点t
a1
、t
a2
、t
a3
和t
b1
、t
b2
、t
b3
,可得:
[0041]
t
a1
=-0.39ms,t
a2
=-0.346ms,t
a3
=-0.45ms;t
b1
=-0.394ms,t
b2
=-0.35ms,t
b3
=-0.586ms;
[0042]
4)进一步地,根据式(1)计算出相应的θ
a
、θ
b
,可得:
[0043]
θ
a
=-67.0679
°
,θ
b
=-79.4390
°
;
[0044]
5)进一步地,根据式(2)(3)(4)计算出相应的投影速度|v
a
|、|v
b
|,可得:
[0045]
|v
a
|=876.645m/s,|v
b
|=589.092m/s;
[0046]
6)进一步地,根据式(5)可得合速度|v|=1003.126m/s;根据式(6)(7)可计算出速度方向在头盔坐标系xoy平面的投影与x轴的夹角为:θ1=67.932
°
,在头盔坐标系xoz平面的投影与x轴的夹角为:θ2=54.704
°
。
[0047]
上述定位结果与设定结果相符,说明了本发明所提子弹运动速度与方向探测的可行性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1