一种适用于蔬菜自动化立体栽培的搬运穿梭车的制作方法
本发明涉及蔬菜自动化种植领域,具体地说是一种适用于蔬菜自动化立体栽培的搬运穿梭车。
背景技术:
1、蔬菜立体种植又名植物工厂,是一种新兴的蔬菜种植方式,主要依靠自动化、信息化等技术,通过对植物生长过程中的温度、湿度、光照、co2浓度以及营养液等环境条件进行自动控制和调节,实现农作物在可控环境下的高效生产。
2、根据农作物产品的生产周期,植物工厂可划分为播种区、育苗区、栽培区、间苗区、采收区等功能分区,并且在生产过程中需要在各个分区之间进行物料搬运。目前,业内对植物工厂的布局方式和搬运方式还处于探索中,主流的种植方案中,物流搬运作业还是普遍依赖于人工完成。人工搬运虽然灵活,但其劳动强度大,作业效率低,且会制约多层栽培架的最大高度,造成种植空间的浪费,此外生产过程中有人为因素干扰,对作物的品质、卫生均有一定程度的影响,而在co2浓度过高的栽培区长期工作,也会对人体健康造成危害。因此,设计一种适用于植物工厂立体栽植的自动化物流装备非常重要。
3、目前,已有尝试将传统的仓储物流自动化装备如堆垛机、多层穿梭车加以改造引入植物工厂的做法,虽然从功能上基本实现了搬运作业自动化,但此类装备的劣势也十分明显:
4、1、只能将作物、栽培板、营养液按照一体式的货物单元进行封装,在这种栽植条件下,营养液无法循环,其成分配比也无法有效检测调节,对作物生长不利,而且后续还要考虑三者分离、更换营养液等工序,这带来了很多复杂和不可控的问题;
5、2、堆垛机、多层穿梭车需要留出巷道空间作为运行通道,大大降低了植物工厂的种植密度。
6、3、以堆垛机为代表的存储方式,由于设备的体积和重量都很大,作业过程中会带来大量的电能消耗,提高了蔬菜的种植成本。
技术实现思路
1、本发明的目的在于提供一种适用于蔬菜自动化立体栽培的搬运穿梭车,可直接对栽培板进行搬运,无需将栽培板与营养液槽绑定同时搬运,提高栽植空间利用率的同时也降低了生产成本。
2、本发明的目的是通过以下技术方案来实现的:
3、一种适用于蔬菜自动化立体栽培的搬运穿梭车,包括行走车体,且所述行走车体内部设有行走驱动机构,所述行走车体两侧均设有行走传动机构、行走轮和抬升机构,其中行走轮通过所述行走驱动机构驱动转动,且所述行走驱动机构通过行走传动机构传递转矩,栽培板设于所述行走车体中且两侧分别通过对应侧的抬升机构支撑,所述行走车体上侧设有箱体,且所述箱体内设有电控系统。
4、所述行走车体两侧设有侧支撑板,所述行走传动机构安装于对应侧的侧支撑板上,所述行走传动机构包括同步带和多个带轮,且所述同步带呈闭环绕过各个带轮,下侧的带轮分别与对应的行走轮同轴固连,且任一带轮通过所述行走驱动机构驱动转动。
5、所述行走驱动机构包括行走电机、传动组件和传动轴,所述传动轴转动安装于行走车体中,并且所述传动轴两端分别与对应的带轮固连,所述传动轴通过所述行走电机驱动转动,且所述行走电机通过所述传动组件传递转矩。
6、所述传动组件包括相互啮合的主动齿轮和从动齿轮,其中主动齿轮安装于所述行走电机的输出轴上,从动齿轮安装于所述传动轴上。
7、所述行走车体两侧设有侧支撑板,所述抬升机构安装于对应的侧支撑板下侧,所述抬升机构包括抬升电机、偏心轴、顶升块和抬升板,其中所述偏心轴通过所述抬升电机驱动转动,所述顶升块通过所述偏心轴转动驱动升降,所述顶升块上侧与所述抬升板固连,所述侧支撑板两侧设有直线轴承,所述抬升板两侧设有导向轴分别插装于对应侧的直线轴承。
8、所述侧支撑板下侧中部设有安装座,所述偏心轴转动设于所述安装座中,所述抬升电机和顶升块分设于所述安装座两侧,且所述偏心轴一端通过联轴器与所述抬升电机输出轴连接。
9、所述电控系统包括行走定位装置、电源系统、网络模块和控制模块。
10、所述电源系统包括电容、供电刷板和取电刷块,所述电容和取电刷块固设于行走车体上侧的箱体内且通过导线连接,行走车体设于一个栽培架中,且供电刷板安装于所述栽培架上并与地面充电系统连接,充电时所述供电刷板与取电刷块接触接通。
11、行走车体设于一个栽培架中,所述栽培架内设有营养液槽和行走轨道,且所述行走车体的行走轮沿着对应侧的行走轨道移动,所述营养液槽设于行走车体下方。
12、所述行走车体上设有救援机构,所述救援机构包括救援钩和救援槽,且所述行走车体一侧设有救援钩,另一侧设有救援槽。
13、本发明的优点与积极效果为:
14、1、本发明可以直接对栽培板进行搬运,无需将栽培板与营养液槽绑定同时搬运,一是大大简化了后续工序的复杂程度,二是可实现营养液的架上循环,便于实现营养液的统一测控和管理。
15、2、本发明可实现蔬菜栽培板的堆栈式密集存取,能够充分利用立体种植中光源与植物的标准空间,最大限度的提高栽植空间的利用率。
16、3、本发明具有重量轻、结构紧凑、能耗低等优点,可降低作物的生产成本。
17、4、本发明可灵活借助于外围搬运设备(提升机、rgv、agv)中转,实现栽培架层间和架间的移动,亦可根据不同的效率需求调整穿梭车的数量,具有很高的通用性和系统柔性。
18、5、本发明具备故障救援功能,大大提高了系统的可维护性。
技术特征:
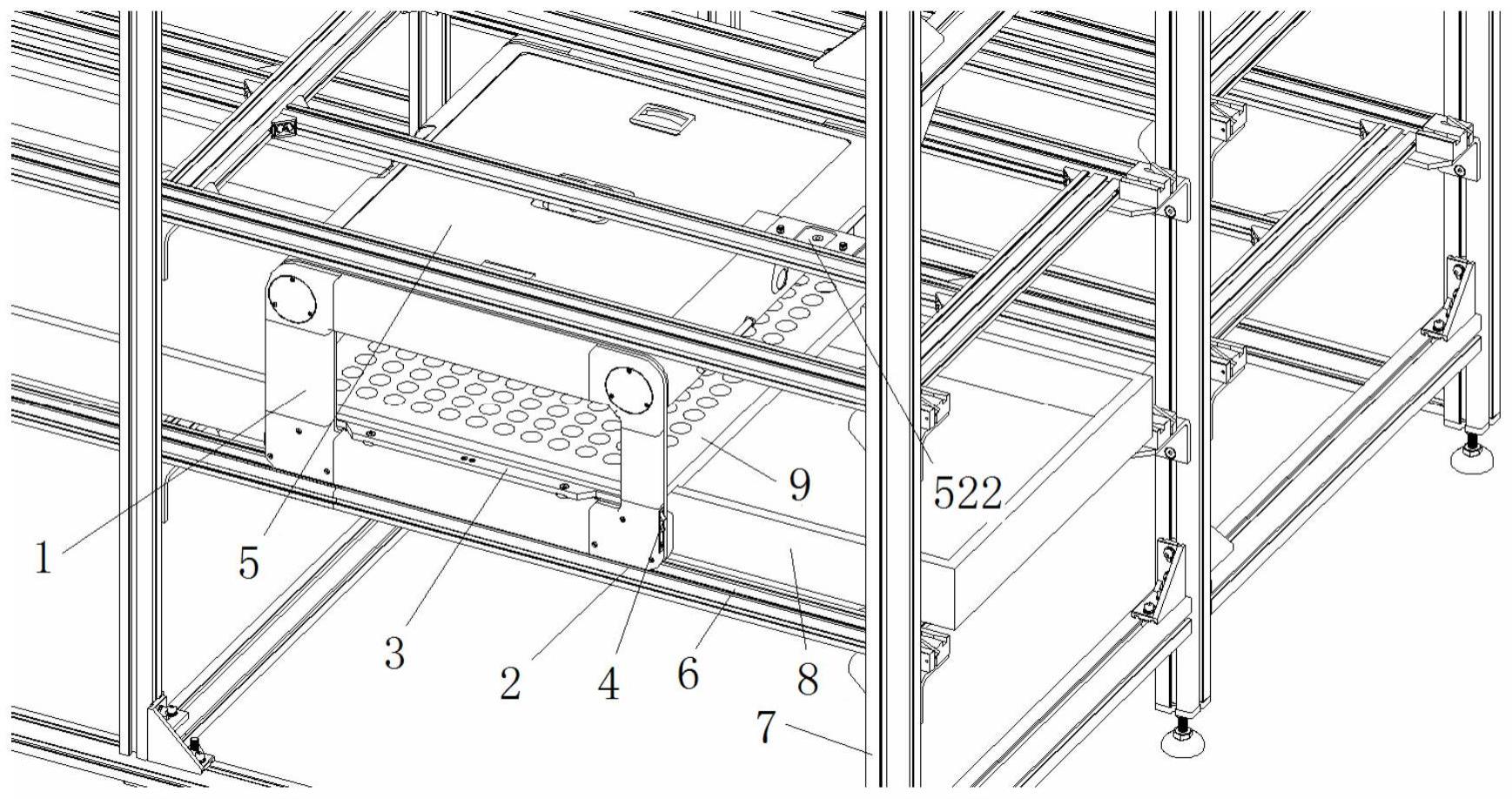
1.一种适用于蔬菜自动化立体栽培的搬运穿梭车,其特征在于:包括行走车体(1),且所述行走车体(1)内部设有行走驱动机构,所述行走车体(1)两侧均设有行走传动机构、行走轮(204)和抬升机构(3),其中行走轮(204)通过所述行走驱动机构驱动转动,且所述行走驱动机构通过行走传动机构传递转矩,栽培板(9)设于所述行走车体(1)中且两侧分别通过对应侧的抬升机构(3)支撑,所述行走车体(1)上侧设有箱体(101),且所述箱体(101)内设有电控系统(5)。
2.根据权利要求1所述的适用于蔬菜自动化立体栽培的搬运穿梭车,其特征在于:所述行走车体(1)两侧设有侧支撑板(102),所述行走传动机构安装于对应侧的侧支撑板(102)上,所述行走传动机构包括同步带(202)和多个带轮(203),且所述同步带(202)呈闭环绕过各个带轮(203),下侧的带轮(203)分别与对应的行走轮(204)同轴固连,且任一带轮(203)通过所述行走驱动机构驱动转动。
3.根据权利要求2所述的适用于蔬菜自动化立体栽培的搬运穿梭车,其特征在于:所述行走驱动机构包括行走电机(201)、传动组件(205)和传动轴(206),所述传动轴(206)转动安装于行走车体(1)中,并且所述传动轴(206)两端分别与对应的带轮(203)固连,所述传动轴(206)通过所述行走电机(201)驱动转动,且所述行走电机(201)通过所述传动组件(205)传递转矩。
4.根据权利要求3所述的适用于蔬菜自动化立体栽培的搬运穿梭车,其特征在于:所述传动组件(205)包括相互啮合的主动齿轮(2051)和从动齿轮(2052),其中主动齿轮(2051)安装于所述行走电机(201)的输出轴上,从动齿轮(2052)安装于所述传动轴(206)上。
5.根据权利要求1所述的适用于蔬菜自动化立体栽培的搬运穿梭车,其特征在于:所述行走车体(1)两侧设有侧支撑板(102),所述抬升机构(3)安装于对应的侧支撑板(102)下侧,所述抬升机构(3)包括抬升电机(308)、偏心轴(305)、顶升块(304)和抬升板(301),其中所述偏心轴(305)通过所述抬升电机(308)驱动转动,所述顶升块(304)通过所述偏心轴(305)转动驱动升降,所述顶升块(304)上侧与所述抬升板(301)固连,所述侧支撑板(102)两侧设有直线轴承(303),所述抬升板(301)两侧设有导向轴(302)分别插装于对应侧的直线轴承(303)。
6.根据权利要求5所述的适用于蔬菜自动化立体栽培的搬运穿梭车,其特征在于:所述侧支撑板(102)下侧中部设有安装座(307),所述偏心轴(305)转动设于所述安装座(307)中,所述抬升电机(308)和顶升块(304)分设于所述安装座(307)两侧,且所述偏心轴(305)一端通过联轴器(306)与所述抬升电机(308)输出轴连接。
7.根据权利要求1所述的适用于蔬菜自动化立体栽培的搬运穿梭车,其特征在于:所述电控系统(5)包括行走定位装置(51)、电源系统(52)、网络模块(53)和控制模块(54)。
8.根据权利要求7所述的适用于蔬菜自动化立体栽培的搬运穿梭车,其特征在于:所述电源系统(52)包括电容(521)、供电刷板(522)和取电刷块(523),所述电容(521)和取电刷块(523)固设于行走车体(1)上侧的箱体(101)内且通过导线连接,行走车体(1)设于一个栽培架(7)中,且供电刷板(522)安装于所述栽培架(7)上并与地面充电系统连接,充电时所述供电刷板(522)与取电刷块(523)接触接通。
9.根据权利要求1所述的适用于蔬菜自动化立体栽培的搬运穿梭车,其特征在于:行走车体(1)设于一个栽培架(7)中,所述栽培架(7)内设有营养液槽(8)和行走轨道(6),且所述行走车体(1)的行走轮(204)沿着对应侧的行走轨道(6)移动,所述营养液槽(8)设于行走车体(1)下方。
10.根据权利要求1所述的适用于蔬菜自动化立体栽培的搬运穿梭车,其特征在于:所述行走车体(1)上设有救援机构(4),所述救援机构(4)包括救援钩(401)和救援槽(402),且所述行走车体(1)一侧设有救援钩(401),另一侧设有救援槽(402)。
技术总结
本发明涉及一种适用于蔬菜自动化立体栽培的搬运穿梭车,包括行走车体,且所述行走车体内部设有行走驱动机构,所述行走车体两侧均设有行走传动机构、行走轮和抬升机构,其中行走轮通过所述行走驱动机构驱动转动,且所述行走驱动机构通过行走传动机构传递转矩,栽培板设于所述行走车体中且两侧分别通过对应侧的抬升机构支撑,所述行走车体上侧设有箱体,且所述箱体内设有电控系统。本发明可直接对栽培板进行搬运,无需将栽培板与营养液槽绑定同时搬运,提高栽植空间利用率的同时也降低了生产成本。
技术研发人员:薛成超,杨春鹏,车元鹏,张磊,王博爽
受保护的技术使用者:沈阳新松机器人自动化股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!