一种用于园林树木整修的自动化设备的制作方法
1.本实用新型涉及园林绿化领域,具体是一种用于园林树木整修的自动化设备。
背景技术:
2.园林绿化是在一定的地域运用工程技术和艺术手段,通过改造地形(或进一步筑山、叠石、理水)种植树木花草、营造建筑和布置园路等途径创作而成的美的自然环境和游憩境域,就称为园林。园林包括庭园、宅园、小游园、花园、公园、植物园、动物园等,随着园林学科的发展,还包括森林公园、风景名胜区、自然保护区或国家公园的游览区以及休养胜地。
3.园林的绿化重视整形修剪、除杂草。成年树在一定高度进行剪截,可以刺激隐藏表皮层内的隐芽萌发,形成年轻枝条,更新复壮。
4.目前,园林的锯树修整,都是依靠人工来手动操作的,而园林的绿化修整都是大面积的进行,就使得人工操作比较费时费力,工作效率低下,且人工操作时常常发生工伤事故,造成工作人员受伤,给绿化生产带来了不便。
技术实现要素:
5.本实用新型的目的在于提供一种用于园林树木整修的自动化设备,它通过车辆带着机械臂行进,在程序或遥控的控制下,自动进行锯树的整修操作,代替传统人工手动操作,提高了工作效率,降低工伤事故的发生率,提高安全性。
6.本实用新型为实现上述目的,通过以下技术方案实现:
7.一种用于园林树木整修的自动化设备,包括车体,所述车体前端设有安装座,所述安装座上设有支撑臂,所述支撑臂远离安装座的一端设有贮存箱,所述贮存箱内设有机械臂,所述机械臂能折叠后收入贮存箱内,所述机械臂远离支撑臂的一端设有锯树工具。
8.进一步的,所述支撑臂与安装座铰接,所述安装座上铰接有第一伸缩杆,所述第一伸缩杆的伸缩端与支撑臂铰接。
9.进一步的,所述贮存箱与支撑臂铰接,所述安装座上铰接有第二伸缩杆,所述支撑臂上铰接有摇臂,所述摇臂的一端与第二伸缩杆的伸缩端铰接,所述摇臂另一端铰接有拉杆,所述拉杆远离摇臂的一端与贮存箱铰接。
10.进一步的,所述机械臂靠近锯树工具的一端底部设有二氧化碳激光管和二氧化碳激光扫描振镜头。
11.进一步的,所述锯树工具为电锯或油锯。
12.对比现有技术,本实用新型的有益效果在于:
13.通过车体行进带动机械臂行进,并通过遥控或程序控制机械臂带动锯树工具对树木进行修整工作,且机械臂可以来回翻转,实现了自动切割的功能,代替传统的人工操作,大大提高了工作效率,整个过程不需要人工手持锯树工具操作,降低工伤事故的发生率,保证树木整修工作的安全性,通过机械臂自身的伸缩延展范围配合车体的移动,使得该设备
的工作范围更加广泛,且工作区域的调整更加灵活方便。
附图说明
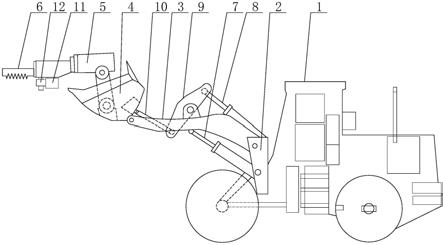
14.附图1是本实用新型的结构示意图。
15.附图中所示标号:
16.1、车体;2、安装座;3、支撑臂;4、贮存箱;5、机械臂;6、锯树工具;7、第一伸缩杆;8、第二伸缩杆;9、摇臂;10、拉杆;11、二氧化碳激光管;12、二氧化碳激光扫描振镜头。
具体实施方式
17.下面结合具体实施例,进一步阐述本实用新型。应理解,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本申请所限定的范围。
18.本实用新型所述是一种用于园林树木整修的自动化设备,主体结构包括车体1,车体1上设有驾驶室,驾驶室内有操控杆,可以通过遥控器或操控杆来对事先输入程序的机械臂5进行操作控制,并通过车体1带动机械臂5移动,以便对行进路线上的树木进行整修工作,车体1的移动范围与机械臂5的伸展活动范围结合,保证较大的工作范围,且对于工作区域的调整更加灵活,所述车体1前端设有安装座2,安装座2设置在车体1的前进方向上,所述安装座2上设有支撑臂3,支撑臂3向远离车体1的方向延伸,拉开锯树工具6工作范围与车体1间的距离,所述支撑臂3远离安装座2的一端设有贮存箱4,贮存箱4采用玻璃钢或硬质塑料制成,在锯树工具6工作碰到高压电线时能起到绝缘作用,以免和大地构成回路,避免威胁操作者和行人的生命安全,所述贮存箱4内设有机械臂5,所述机械臂5能折叠后收入贮存箱4内,该设备在不使用时,将机械臂5折叠起来存入贮存箱4内,当该设备工作时,控制机械臂5从贮存箱4内伸展出来,进行锯树的操作,防止空闲时机械臂5暴露在外发生碰撞损坏,贮存箱4内还设有为机械臂供电的蓄电池,所述机械臂5远离支撑臂3的一端设有锯树工具6,通过锯树工具6对树木进行整修工作,
19.通过车体1带动机械臂5移动来对行进路线上的树木进行锯树整修工作,通过机械臂5的多关节的灵活性,使车体1固定时对某一小范围内的树木进行整修工作,灵活方便,通过驾驶室内的操控杆或遥控来对事先录入程序的机械臂5进行控制,以便操作锯树工具6进行锯树整修的工作。
20.优选的,所述支撑臂3与安装座2铰接,所述安装座2上靠近底部的位置铰接有第一伸缩杆7,第一伸缩杆7为液压伸缩杆,所述第一伸缩杆7的伸缩端与支撑臂3的底部铰接,通过第一伸缩杆7的伸缩来调整支撑臂3绕安装座2转动的角度,从而灵活调整机械臂5的高度,使锯树工具6能应对不同高度位置的锯树修整工作。
21.优选的,所述贮存箱4与支撑臂3铰接,所述安装座2上靠近顶部的位置铰接有第二伸缩杆8,第二伸缩杆8也为液压伸缩杆,所述支撑臂3上铰接有摇臂9,所述摇臂9的一端与第二伸缩杆8的伸缩端铰接,所述摇臂9另一端铰接有拉杆10,所述拉杆10远离摇臂9的一端与贮存箱4铰接,第二伸缩杆8、摇臂9、拉杆10组成一套翻箱工作的操作机构,第二伸缩杆8伸缩带动摇臂9绕铰接处转动,摇臂9转动带动拉杆10伸出或回退,从而带动贮存箱4绕铰接
处转动,可以自由的翻转贮存箱4,使贮存箱4的角度能够转动250度以上,使机械臂5的活动范围和锯树工具6的工作范围更加灵活广泛。
22.优选的,所述机械臂5靠近锯树工具6的一端底部设有二氧化碳激光管11和二氧化碳激光扫描振镜头12,二氧化碳激光管11和二氧化碳激光扫描振镜头12为现有技术已知的部件,其具体结构和工作原理在此不做赘述,在锯树工具6将树木锯断后,通过二氧化碳激光管11和二氧化碳激光扫描振镜头12对树木切割的端截面进行烧蚀炭化,防止树液流出。
23.优选的,所述锯树工具6为电锯或油锯。
24.本专利的设备通过车体1行进带动机械臂5行进,并通过遥控或程序控制机械臂5带动锯树工具6对树木进行修整工作,且机械臂5可以来回翻转,实现了自动切割的功能,代替传统的人工操作,大大提高了工作效率,整个过程不需要人工手持锯树工具6操作,降低工伤事故的发生率,保证树木整修工作的安全性,通过机械臂5自身的伸缩延展范围配合车体1的移动,以及第一伸缩杆7和第二伸缩杆8对机械臂5高度和角度的调整,使得该设备的工作范围更加广泛,且工作区域的调整更加灵活方便。
技术特征:
1.一种用于园林树木整修的自动化设备,包括车体(1),其特征在于:所述车体(1)前端设有安装座(2),所述安装座(2)上设有支撑臂(3),所述支撑臂(3)远离安装座(2)的一端设有贮存箱(4),所述贮存箱(4)内设有机械臂(5),所述机械臂(5)能折叠后收入贮存箱(4)内,所述机械臂(5)远离支撑臂(3)的一端设有锯树工具(6)。2.根据权利要求1所述一种用于园林树木整修的自动化设备,其特征在于:所述支撑臂(3)与安装座(2)铰接,所述安装座(2)上铰接有第一伸缩杆(7),所述第一伸缩杆(7)的伸缩端与支撑臂(3)铰接。3.根据权利要求1所述一种用于园林树木整修的自动化设备,其特征在于:所述贮存箱(4)与支撑臂(3)铰接,所述安装座(2)上铰接有第二伸缩杆(8),所述支撑臂(3)上铰接有摇臂(9),所述摇臂(9)的一端与第二伸缩杆(8)的伸缩端铰接,所述摇臂(9)另一端铰接有拉杆(10),所述拉杆(10)远离摇臂(9)的一端与贮存箱(4)铰接。4.根据权利要求1所述一种用于园林树木整修的自动化设备,其特征在于:所述机械臂(5)靠近锯树工具(6)的一端底部设有二氧化碳激光管(11)和二氧化碳激光扫描振镜头(12)。5.根据权利要求1所述一种用于园林树木整修的自动化设备,其特征在于:所述锯树工具(6)为电锯或油锯。
技术总结
本实用新型公开了一种用于园林树木整修的自动化设备,主要涉及园林绿化领域。包括车体,所述车体前端设有安装座,所述安装座上设有支撑臂,所述支撑臂远离安装座的一端设有贮存箱,所述贮存箱内设有机械臂,所述机械臂能折叠后收入贮存箱内,所述机械臂远离支撑臂的一端设有锯树工具。本实用新型的有益效果在于:通过车辆带着机械臂行进,在程序或遥控的控制下,自动进行锯树的整修操作,代替传统人工手动操作,提高了工作效率,降低工伤事故的发生率,提高安全性。提高安全性。提高安全性。
技术研发人员:祁岳东 张飞 张文楸 王锡凯 王锡建 祁健家
受保护的技术使用者:张飞
技术研发日:2021.01.13
技术公布日:2021/9/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1