一种基于单片机的昆虫八通道飞行磨
1.本实用新型涉及飞行磨领域,尤其涉及一种基于单片机的昆虫八通道飞行磨。
背景技术:
2.昆虫迁飞是造成农业害虫扩散的重要原因,研究昆虫的迁飞行为有助于了解其扩散分布规律,对于害虫预测预报有重要意义。常用昆虫飞行磨等装置研究昆虫的飞行能力。在国内最早的飞行磨装置利用简单的原材料,通过电磁原理统计圈数记录时间,最后换算成飞行数据。这种装置存在的缺点是摩擦阻力较大、实验通道少、机械式记录装置和rc震荡电路不精确的问题,对于飞行能力差的小型昆虫飞行能力的测定极不准确。赵宇等改进过的基于单片机的多通道飞行磨,利用磁悬浮的方式减低摩擦阻力,获得了更为精确的实验数据。然而,这种多通道的飞行磨槽型光耦传感器原理为昆虫飞行一圈,遮挡光耦一次,传感器的分辨率有限,对于飞行瞬时速度以及最大速度等参数不能明显展现。目前国内已有的飞行磨厂家较少,飞行磨造价较贵,动辄即需上万元。因此,一种分辨率更高,造价低廉,并且可以测量瞬时数据的飞行磨装置的制得十分必要。
技术实现要素:
3.本实用新型提供一种基于单片机的昆虫八通道飞行磨,解决了耗能低、避免二次污染、降低成本的技术问题。
4.为解决上述技术问题,本实用新型提供的一种基于单片机的昆虫八通道飞行磨,包括第一亚克力板,所述第一亚克力板的上方设有第二亚克力板,所述第一亚克力板和第二亚克力板之间设有八个飞行磨和支撑柱、单片机且八个飞行磨的排列为任意规律,所述支撑柱的顶部和底部分别螺钉固定连接在第一亚克力板的顶部和第二亚克力板的底部,每个所述飞行磨包括第一固定筒、第二固定筒、连接杆且飞行磨位于第一亚克力板和第二亚克力板之间,所述第一亚克力板的顶部分别螺钉固定连接有第一固定筒、连接杆,所述第二亚克力板的底部螺钉固定连接有第二固定筒,所述第一固定筒和第二固定筒的内壁均固定套接有磁铁块,两个所述磁铁块之间通过吸力固定系接有吊臂,所述吊臂的底部且位于第一固定筒的右方固定连接有固定环,所述吊臂的外壁固定焊接有转盘,所述连接杆的顶部通过铁丝绕接有凹槽型光电传感器,每个所述凹槽型光电传感器的信号端输出端与单片机的信号输入端连接。
5.优选的,所述第一固定筒、第二固定筒沿着上下方向对齐,且两个磁铁块分别靠近第一固定筒的顶部和第二固定筒的底部。
6.优选的,所述转盘的外壁开设有多个切口,且所有切口呈环形分布。
7.优选的,相邻的两个所述切口之间形成的夹角均为18
°
,共有10个不透光区域,转盘采用带有弹性。
8.优选的,所述转盘上下方向的位置位于凹槽型光电传感器右端凹槽的槽顶与槽底之间。
9.与相关技术相比较,本实用新型提供的一种基于单片机的昆虫八通道飞行磨具有如下有益效果:
10.通过转盘位于凹槽型光电传感器凹槽内部,通过切口可以透光,通过没有切口的位置进行遮光,每次遮光都可以引起凹槽型光电传感器反应,昆虫带动飞行磨转一圈共可产生十次脉冲,从而计算出瞬时速度等原有装置测不得的数据,本实用新型结构接单简单、高效、便宜、易获得,这使得本产品定价较低,每个凹槽型光电传感器的信号端输出端与单片机的信号输入端连接,从而使得stm32f103单片机,可以实现同时采集台飞行磨数据,进行多通道测量。
附图说明
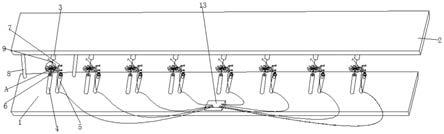
11.图1为本实用新型一种基于单片机的昆虫八通道飞行磨的轴测图;
12.图2为本实用新型一种基于单片机的昆虫八通道飞行磨的图1中a处的放大图。
13.图中标号:1、第一亚克力板,2、第二亚克力板,3、第二固定筒,4、第一固定筒,5、连接杆,6、磁铁块,7、凹槽型光电传感器,8、支撑柱,9、吊臂,10、转盘,11、固定环,12、切口,13、单片机。
具体实施方式
14.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
15.由图1-2给出,本实用新型包括实用新型提供的一种基于单片机的昆虫八通道飞行磨,包括第一亚克力板1,第一亚克力板1的上方设有第二亚克力板2,第一亚克力板1和第二亚克力板2之间设有八个飞行磨和支撑柱8、单片机13且八个飞行磨的排列为任意规律,支撑柱8的顶部和底部分别螺钉固定连接在第一亚克力板1的顶部和第二亚克力板2的底部,每个飞行磨包括第一固定筒4、第二固定筒3、连接杆5且飞行磨位于第一亚克力板1和第二亚克力板2之间,第一亚克力板1的顶部分别螺钉固定连接有第一固定筒4、连接杆5,第二亚克力板2的底部螺钉固定连接有第二固定筒3,第一固定筒4和第二固定筒3的内壁均固定套接有磁铁块6,两个磁铁块6之间通过吸力固定系接有吊臂9,吊臂9的底部且位于第一固定筒4的右方固定连接有固定环11,吊臂9的外壁固定焊接有转盘10,连接杆5的顶部通过铁丝绕接有凹槽型光电传感器7,凹槽型光电传感器7的型号为h810,每个凹槽型光电传感器7的信号端输出端与单片机13的信号输入端连接,此时凹槽型光电传感器7的信号端输出端为并联状态。
16.第一固定筒4、第二固定筒3沿着上下方向对齐,且两个磁铁块6分别靠近第一固定筒4的顶部和第二固定筒3的底部。
17.转盘10的外壁开设有多个切口,且所有切口呈环形分布,从而和没有切口12的部分形成遮光和不遮光的功能。
18.相邻的两个切口12之间形成的夹角均为18
°
,共有10个不透光区域,转盘采用带有弹性。
19.转盘10上下方向的位置位于凹槽型光电传感器7右端凹槽的槽顶与槽底之间,从而使得凹槽型光电传感器7感应到转盘10的遮光和不遮光。
20.本实用新型通过转盘10位于凹槽型光电传感器7凹槽内部,通过切口12可以透光,通过没有切口的位置进行遮光,每次遮光都可以引起凹槽型光电传感器7反应,昆虫带动飞行磨转一圈共可产生十次脉冲,从而计算出瞬时速度等原有装置测不得的数据,本实用新型结构接单简单、高效、便宜、易获得,这使得本产品定价较低,每个凹槽型光电传感器7的信号端输出端与单片机13的信号输入端连接,从而使得stm32f103单片机,可以实现同时采集8台飞行磨数据,进行多通道测量。
21.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
22.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物。
技术特征:
1.一种基于单片机的昆虫八通道飞行磨,包括第一亚克力板(1),其特征在于:所述第一亚克力板(1)的上方设有第二亚克力板(2),所述第一亚克力板(1)和第二亚克力板(2)之间设有八个飞行磨和支撑柱(8)、单片机(13)且八个飞行磨的排列为任意规律,所述支撑柱(8)的顶部和底部分别螺钉固定连接在第一亚克力板(1)的顶部和第二亚克力板(2)的底部,每个所述飞行磨包括第一固定筒(4)、第二固定筒(3)、连接杆(5)且飞行磨位于第一亚克力板(1)和第二亚克力板(2)之间,所述第一亚克力板(1)的顶部分别螺钉固定连接有第一固定筒(4)、连接杆(5),所述第二亚克力板(2)的底部螺钉固定连接有第二固定筒(3),所述第一固定筒(4)和第二固定筒(3)的内壁均固定套接有磁铁块(6),两个所述磁铁块(6)之间通过吸力固定系接有吊臂(9),所述吊臂(9)的底部且位于第一固定筒(4)的右方固定连接有固定环(11),所述吊臂(9)的外壁固定焊接有转盘(10),所述连接杆(5)的顶部通过铁丝绕接有凹槽型光电传感器(7),每个所述凹槽型光电传感器(7)的信号端输出端与单片机(13)的信号输入端连接。2.根据权利要求1所述的一种基于单片机的昆虫八通道飞行磨,其特征在于,所述第一固定筒(4)、第二固定筒(3)沿着上下方向对齐,且两个磁铁块(6)分别靠近第一固定筒(4)的顶部和第二固定筒(3)的底部。3.根据权利要求1所述的一种基于单片机的昆虫八通道飞行磨,其特征在于,所述转盘(10)的外壁开设有多个切口(12),且所有切口呈环形分布。4.根据权利要求3所述的一种基于单片机的昆虫八通道飞行磨,其特征在于,相邻的两个所述切口(12)之间形成的夹角均为18
°
,共有10个不透光区域,转盘采用带有弹性。5.根据权利要求1所述的一种基于单片机的昆虫八通道飞行磨,其特征在于,所述转盘(10)上下方向的位置位于凹槽型光电传感器(7)右端凹槽的槽顶与槽底之间。
技术总结
本实用新型公开了一种基于单片机的昆虫八通道飞行磨,涉及飞行磨领域,一种基于单片机的昆虫八通道飞行磨,包括第一亚克力板,第一亚克力板的上方设有第二亚克力板,通过转盘位于凹槽型光电传感器凹槽内部,通过切口可以透光,通过没有切口的位置进行遮光,每次遮光都可以引起凹槽型光电传感器反应,昆虫带动飞行磨转一圈共可产生十次脉冲,从而计算出瞬时速度等原有装置测不得的数据,本实用新型结构接单简单、高效、便宜、易获得,这使得本产品定价较低,每个凹槽型光电传感器的信号端输出端与单片机的信号输入端连接,从而使得STM32f103单片机,可以同时采集台飞行磨数据,进行多通道测量。进行多通道测量。进行多通道测量。
技术研发人员:陈辉 胡高 李新然
受保护的技术使用者:南京农业大学
技术研发日:2021.07.19
技术公布日:2022/3/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1