一种气压式自动投饵机
1.本实用新型涉及一种投饵装置,特别是一种气压式自动投饵机。
背景技术:
2.在进行水产品、海产品的人工养殖时,需要定时定量地向养殖池塘或水域投放饵料。传统上,绝大多数的投饵工作还是通过人工操作来实现的,这样就存在劳动强度大、且投饵量并不精准等诸多问题。特别是投饵量不精准的问题,如果投饵量过大,则可能产生较多的饵料残留,影响水质,如果投饵量过小,则会降低水产品、海产品的成长速度。可以说,这种传统的人工投饵操作以及现有的简单、粗放型投饵装置已经无法满足养殖规模化、现代化和自动化发展的需求。因此现在需要一种能够解决上述问题的方法或装置。
技术实现要素:
3.本实用新型是为了解决现有技术所存在的上述不足,提出一种结构简单,设计巧妙,布局合理,能够精准定量地进行投饵,且利用气压来实现各部分机构动作的自动投饵机。
4.本实用新型的技术解决方案是:一种气压式自动投饵机,包括支撑架1,其特征在于:所述支撑架1上支撑有饵料箱2,所述饵料箱2的出口端与定量箱体3相连通,所述定量箱体3的中部转动支撑有排料拨轮4,排料拨轮4下方则为定量腔5,在定量腔5顶部的侧壁上还设置有距离传感器6,所述定量腔5的底端开口处滑动连接有挡板7,所述挡板7的一侧与连杆8相连,所述连杆8远离挡板7的一端与活塞相连,所述活塞则活动连接在缸体9中,所述缸体9则与支撑架1固定连接,连杆8上还套接有弹簧10,所述弹簧10位于缸体9的内壁与活塞之间,缸体9的内腔通过带有第一电磁换向阀11的管路与高压气罐12相连,而所述高压气罐12则通过带有第二电磁换向阀13的管路与固定支撑在支撑架1上的气动马达14相连,所述气动马达14的输出轴则通过齿轮传动副与排料拨轮4的转轴相连,所述定量腔5的下方还设置有弧形导料板15,
5.所述距离传感器6、第一电磁换向阀11、第二电磁换向阀13和气动马达14均通过控制系统16统一进行控制。
6.本实用新型同现有技术相比,具有如下优点:
7.本种结构形式的气压式自动投饵机,其结构简单,设计巧妙,布局合理,它针对传统的人工投饵过程中所存在的种种问题,设计出一种特殊的结构,它利用高压气罐中的气体作为动力源,分别驱动气动马达和活塞动作,并利用它们分别带动排料拨轮和挡板动作,抛料拨轮转动时可实现存储在饵料箱中的饵料向定量腔中的输送,而挡板的动作则可以将定量后的饵料一次性投放出去。这种自动投饵机,能够精准地实现定量投饵,大大节省了人工劳动,在提高工作效率的同时,还可以精准地保证投饵量。并且它的制作工艺简单,制造成本低廉,因此可以说它具备了多种优点,特别适合于在本领域中推广应用,其市场前景十分广阔。
附图说明
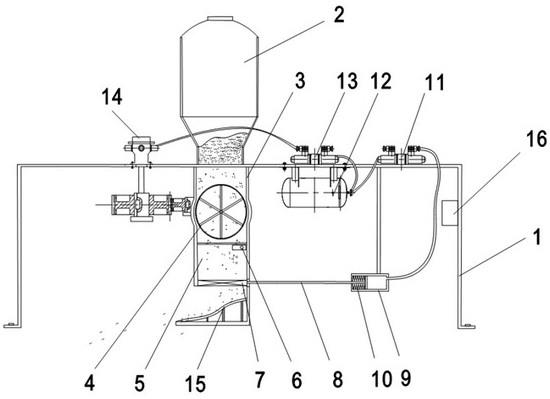
8.图1是本实用新型实施例的结构示意图。
9.图2是本实用新型实施例中的局部放大图。
具体实施方式
10.下面将结合附图说明本实用新型的具体实施方式。如图1、图2所示:一种气压式自动投饵机,包括支撑架1,在这个支撑架1上支撑有饵料箱2,所述饵料箱2的出口端与定量箱体3相连通,所述定量箱体3的中部转动支撑有排料拨轮4,排料拨轮4下方则为定量腔5,在定量腔5顶部的侧壁上还设置有距离传感器6,所述定量腔5的底端开口处滑动连接有挡板7,所述挡板7的一侧与连杆8相连,所述连杆8远离挡板7的一端与活塞相连,所述活塞则活动连接在缸体9中,所述缸体9则与支撑架1固定连接,连杆8上还套接有弹簧10,所述弹簧10位于缸体9的内壁与活塞之间,缸体9的内腔通过带有第一电磁换向阀11的管路与高压气罐12相连,而所述高压气罐12则通过带有第二电磁换向阀13的管路与固定支撑在支撑架1上的气动马达14相连,所述气动马达14的输出轴则通过齿轮传动副与排料拨轮4的转轴相连,这里的齿轮传动副可以根据实际需要进行选择或设计,要求是将气动马达14的输出扭矩降低到合理的转速,并最终驱动排料拨轮4转动,从而防止因排料拨轮4转动过快而导致饵料破损的问题;所述定量腔5的下方还设置有弧形导料板15,所述距离传感器6、第一电磁换向阀11、第二电磁换向阀13和气动马达14均通过控制系统16统一进行控制。
11.本实用新型实施例的气压式自动投饵机的工作过程如下:将本装置的支撑架安装在养殖池塘上,或安装在投饵渔船上,以进行自动投饵操作,需要进行投饵操作时,工作人员通过控制系统16发出信号,控制系统16控制第二电磁换向阀13工作,高压气罐12与气动马达14之间的管路导通,高压气罐12中的高压气体进入气动马达14并驱动其工作,气动马达14带动其输出轴转动,进而通过齿轮传动副驱动排料拨轮4转动,排料拨轮4转动时,会将饵料箱2中的饵料逐步地拨送到下方的定量腔5中,事先根据实际情况确定每一次的投饵量,并根据投饵量计算好距离传感器6的触发距离,随着定量腔5中饵料的不断增多,饵料与距离传感器6之间的距离也越来越短,当距离传感器6被触发时,说明此时定量腔5中的饵料已经达到单次投饵量,因此控制系统16会控制第二电磁换向阀13关闭,排料拨轮4停止转动,此时饵料不再继续向下进入定量腔5;同时控制系统还会控制第一电磁换向阀11工作,让缸体9上连接的管路与大气连通,存储在缸体9中的高压气体排出,这样弹簧10便会推动活塞运动,进而带动连杆8和挡板7水平运动,挡板7从定量腔5底端的开口处滑开,存储在定量腔5中的一定量的饵料便会通过开口落下,并通过弧形导料板15的导向后进入养殖池塘或目标水域;
12.投饵结束后(只要挡板7滑开一定时间即可认定为投饵操作结束),控制系统16又会控制第一电磁换向阀11工作,将高压气罐12重新与缸体9的内腔导通,高压空气进入缸体9后,推动活塞反向运动,挡板7重新将定量腔5底部的开口封闭,本装置回复到等待状态,即可等待下一次的投饵操作。
技术特征:
1.一种气压式自动投饵机,包括支撑架(1),其特征在于:所述支撑架(1)上支撑有饵料箱(2),所述饵料箱(2)的出口端与定量箱体(3)相连通,所述定量箱体(3)的中部转动支撑有排料拨轮(4),排料拨轮(4)下方则为定量腔(5),在定量腔(5)顶部的侧壁上还设置有距离传感器(6),所述定量腔(5)的底端开口处滑动连接有挡板(7),所述挡板(7)的一侧与连杆(8)相连,所述连杆(8)远离挡板(7)的一端与活塞相连,所述活塞则活动连接在缸体(9)中,所述缸体(9)则与支撑架(1)固定连接,连杆(8)上还套接有弹簧(10),所述弹簧(10)位于缸体(9)的内壁与活塞之间,缸体(9)的内腔通过带有第一电磁换向阀(11)的管路与高压气罐(12)相连,而所述高压气罐(12)则通过带有第二电磁换向阀(13)的管路与固定支撑在支撑架(1)上的气动马达(14)相连,所述气动马达(14)的输出轴则通过齿轮传动副与排料拨轮(4)的转轴相连,所述定量腔(5)的下方还设置有弧形导料板(15),所述距离传感器(6)、第一电磁换向阀(11)、第二电磁换向阀(13)和气动马达(14)均通过控制系统(16)统一进行控制。
技术总结
本实用新型公开一种气压式自动投饵机,包括支撑架,支撑架上支撑有饵料箱,所述饵料箱的出口端与定量箱体相连通,所述定量箱体的中部转动支撑有排料拨轮,排料拨轮下方则为定量腔,在定量腔顶部的侧壁上还设置有距离传感器,所述定量腔的底端开口处滑动连接有挡板,所述挡板的一侧与连杆相连,所述连杆远离挡板的一端与活塞相连,所述活塞则活动连接在缸体中,所述缸体则与支撑架固定连接,连杆上还套接有弹簧,所述弹簧位于缸体的内壁与活塞之间,缸体的内腔通过带有第一电磁换向阀的管路与高压气罐相连,而所述高压气罐则通过带有第二电磁换向阀的管路与固定支撑在支撑架上的气动马达相连。气动马达相连。气动马达相连。
技术研发人员:黄临泽 姜忠爱 包琳 张艺源 高岳枫 张志远 陈思滢 郝修路 许朝威 樊佳琦
受保护的技术使用者:大连海洋大学
技术研发日:2021.09.23
技术公布日:2022/4/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1