一种个性化自动绿篱修剪机
1.本实用新型涉及园林机械领域,具体涉及一种个性化自动绿篱修剪机。
背景技术:
2.随着我国环保意识的不断提高,园林事业的逐步发展,园林养护的标准也越来越高。现在以人力为主的园林养护模式已不能满足现在的园林发展需求,所以园林机械正在被广泛的使用。绿篱机作为园林绿化修剪作业中不可或缺的机械工具,它提高了园林工作的效率,但是目前,我国绿篱机的修剪普遍采用的是手持式绿篱修剪机,需要人工操作且工作效率不高,工作环境恶劣。而传统小型车载式绿篱机只能在平坦的公路上进行作业,无法适应斜坡、楼梯等环境绿篱的修剪。
技术实现要素:
3.有鉴于此,本实用新型的目的是研制出一种个性化自动绿篱修剪机,可解决传统绿篱机修剪形式单一、地形自适应能力差等问题,通过机器视觉技术和轨迹规划技术实现了精准化、无人化、高适应能力、个性化园林修剪。
4.本实用新型的个性化自动绿篱修剪机,包括底盘、设置于底盘上的机械臂、激光雷达和摄像头;所述机械臂末端设有修剪刀具;所述修剪刀具包括刀头、支撑平台、刀具驱动电机、连杆机构和万向轴;所述刀头包括刀片基架、固定于刀片基架的外刀片、通过轴承安装于刀片基架的内刀片;所述刀具驱动电机安装于支撑平台,其转轴通过万向轴连接于内刀片;所述连杆机构包括设置于支撑平台上的舵机、固定于舵机转轴的曲柄,铰接于曲柄与刀片基架之间的连杆;
5.进一步,所述底盘包括底盘本体、设置于底盘本体上的载物平台、通过v 型连接件安装于底盘本体两侧的橡胶轮、用于驱动橡胶轮转动的行进驱动电机、设置于底盘本体前端的抬升臂、安装于抬升臂前端的爬梯轮和用于驱动抬升臂俯仰摆动的爬楼电机;
6.进一步,所述机械臂包括底座、旋转电机、旋转座、大臂、小臂和旋转臂;所述底座固定安装于底盘本体上,所述旋转电机固定于底座上;所述旋转座通过推力轴承支承于旋转电机壳体上,且旋转电机的转轴固定连接于旋转座;所述大臂后端连接于旋转座,且大臂后端设有用于驱动大臂相对于旋转座摆动的一号舵机;所述小臂后端连接于大臂前端,且小臂后端设有用于驱动小臂相对于大臂摆动的二号舵机;所述旋转臂连接于小臂前端,且小臂前端设有用于驱动旋转臂相对于小臂摆动的三号舵机。
7.本实用新型的有益效果:本实用新型的绿篱修剪机搭载有摄像头和激光雷达,结合现有的机器视觉技术和轨迹规划技术实现自主行进;同时,底盘前部设有抬升臂和爬梯轮,可大大提高修剪机的通过性能;底盘上的机械臂带动修剪刀具在空间内移动完成修剪作业。
附图说明
8.下面结合附图和实施例对本实用新型作进一步描述:
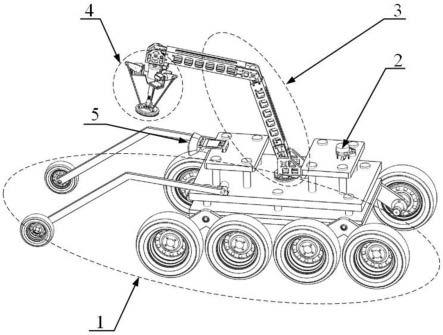
9.图1为本实用新型的个性化自动绿篱修剪机的整体结构示意图;
10.图2为本实用新型的底盘的结构示意图;
11.图3为本实用新型的机械臂的结构示意图;
12.图4为本实用新型的修剪刀具的结构示意图;
13.图5为本实用新型的刀头的结构示意图;
14.图6为本实用新型的连杆机构的结构示意图。
具体实施方式
15.如图1所示,本实施例的一种个性化自动绿篱修剪机,包括底盘1、设置于底盘1上的机械臂3、激光雷达2和摄像头5,所述机械臂3末端设有修剪刀具 4。
16.如图2所示,所述底盘1包括底盘本体1-6、设置于底盘本体1-6上的两个载物平台1-5、通过v型连接件1-2安装于底盘本体1-6两侧的橡胶轮1-1、用于驱动橡胶轮1-1转动的行进驱动电机1-3、设置于底盘本体1-6前端的抬升臂 1-8、安装于抬升臂1-8前端的爬梯轮和用于驱动抬升臂1-8俯仰摆动的爬楼电机1-7;所述激光雷达2和摄像头5分别设置于两载物平台1-5上;所述行进驱动电机1-3通过电机支架1-4安装于v型连接件1-2,其转轴固定连接于橡胶轮 1-1;整个底盘1在橡胶轮1-1的驱动下行进,当遇到陡坡、楼梯等障碍时,爬楼电机1-7带动抬升臂1-8向下摆动,从而将整个底盘1前端向上撑起,使底盘1能够顺利越过障碍。
17.如图3所示,所述机械臂3包括底座3-6、旋转电机3-5、旋转座、大臂3-3、小臂3-2和旋转臂3-1;所述底座3-6固定安装于底盘本体1-6上,所述旋转电机3-5的壳体固定于底座3-6上;所述旋转座通过推力轴承3-4支承于旋转电机3-5的壳体上,且旋转电机3-5的转轴固定连接于旋转座以驱动旋转座绕轴线自转;所述大臂3-3后端连接于旋转座,且大臂3-3后端设有用于驱动大臂 3-3相对于旋转座摆动的一号舵机;所述小臂3-2后端连接于大臂3-3前端,且小臂3-2后端设有用于驱动小臂3-2相对于大臂3-3摆动的二号舵机;所述旋转臂3-1连接于小臂3-2前端,且小臂3-2前端设有用于驱动旋转臂3-1相对于小臂3-2摆动的三号舵机;修剪刀具4安装于旋转臂3-1,通过旋转电机3-5、一至三号舵机的共同作用可驱动机械臂3带动修剪刀具4移动至需要进行修剪的位置。
18.如图4所示,所述修剪刀具4包括刀头4-1、支撑平台4-2、刀具驱动电机 4-3、连杆机构4-4和万向轴;如图5,所述刀头4-1包括刀片基架4-1-3、固定于刀片基架4-1-3的外刀片4-1-2、通过轴承4-1-4安装于刀片基架4-1-3的内刀片4-1-1;所述刀具驱动电机4-3安装于支撑平台4-2,其转轴通过万向轴连接于内刀片4-1-1;刀具驱动电机4-3可通过万向轴带动内刀片4-1-1相对于外刀片4-1-2旋转,内刀片4-1-1和外刀片4-1-2为环形刀片并设有环形的锯齿刀刃,内刀片4-1-1相对于外刀片4-1-2旋转时可有效切断待修剪的枝叶;如图6所示,所述连杆机构4-4包括设置于通过舵机支撑件4-4-1安装于支撑平台4-2上的舵机4-4-2、固定于舵机4-4-2转轴的曲柄4-4-3,铰接于曲柄4-4-3 与刀片基架4-1-3之间的连杆4-4-4,连杆下端通过角码4-4-5与刀片基架4-1-3 顶面实现铰接;舵机4-4-2可通过曲柄连杆机构4-4带动刀片基架4-1-3绕万向轴底部的万向节转动,以调节整个修剪刀具4的角度。
19.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化;凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均包含在本实用新型的保护范围之内。
技术特征:
1.一种个性化自动绿篱修剪机,其特征在于:包括底盘、设置于底盘上的机械臂、激光雷达和摄像头;所述机械臂末端设有修剪刀具;所述修剪刀具包括刀头、支撑平台、刀具驱动电机、连杆机构和万向轴;所述刀头包括刀片基架、固定于刀片基架的外刀片、通过轴承安装于刀片基架的内刀片;所述刀具驱动电机安装于支撑平台,其转轴通过万向轴连接于内刀片;所述连杆机构包括设置于支撑平台上的舵机、固定于舵机转轴的曲柄,铰接于曲柄与刀片基架之间的连杆。2.根据权利要求1所述的个性化自动绿篱修剪机,其特征在于:所述底盘包括底盘本体、设置于底盘本体上的载物平台、通过v型连接件安装于底盘本体两侧的橡胶轮、用于驱动橡胶轮转动的行进驱动电机、设置于底盘本体前端的抬升臂、安装于抬升臂前端的爬梯轮和用于驱动抬升臂俯仰摆动的爬楼电机。3.根据权利要求2所述的个性化自动绿篱修剪机,其特征在于:所述机械臂包括底座、旋转电机、旋转座、大臂、小臂和旋转臂;所述底座固定安装于底盘本体上,所述旋转电机固定于底座上;所述旋转座通过推力轴承支承于旋转电机壳体上,且旋转电机的转轴固定连接于旋转座;所述大臂后端连接于旋转座,且大臂后端设有用于驱动大臂相对于旋转座摆动的一号舵机;所述小臂后端连接于大臂前端,且小臂后端设有用于驱动小臂相对于大臂摆动的二号舵机;所述旋转臂连接于小臂前端,且小臂前端设有用于驱动旋转臂相对于小臂摆动的三号舵机。
技术总结
本实用新型公开了一种个性化自动绿篱修剪机,包括底盘、设置于底盘上的机械臂、激光雷达和摄像头;所述机械臂末端设有修剪刀具;所述修剪刀具包括刀头、支撑平台、刀具驱动电机、连杆机构和万向轴;所述刀头包括刀片基架、固定于刀片基架的外刀片、通过轴承安装于刀片基架的内刀片;所述刀具驱动电机安装于支撑平台,其转轴通过万向轴连接于内刀片;所述连杆机构包括设置于支撑平台上的舵机、固定于舵机转轴的曲柄,铰接于曲柄与刀片基架之间的连杆;本修剪机可解决传统绿篱机修剪形式单一、地形自适应能力差等问题,通过机器视觉技术和轨迹规划技术实现了精准化、无人化、高适应能力、个性化园林修剪。个性化园林修剪。个性化园林修剪。
技术研发人员:曾海森 兰开浪 黄珈雯 邓华滔 熊思帆 陈雨霏 刘鑫 黄欣婧
受保护的技术使用者:西南石油大学
技术研发日:2021.12.02
技术公布日:2022/10/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1