一种马铃薯自动捡拾装置
1.本实用新型涉及一种自动捡拾装置,特别涉及一种马铃薯自动捡拾装置,属于农业收获机械技术领域。
背景技术:
2.马铃薯是一种世界性经济作物,素有“地下苹果”、“第二面包”之称。马铃薯收获过程中,挖掘机挖掘、升运过程薯块受到土壤包裹缓冲作用,损伤较少,现有的马铃薯挖掘机多能满足国家行业标准伤薯率要求。而马铃薯捡拾机收获作业中由于薯块失去土壤保护,在捡拾过程中损伤较大,难以满足国家行业标准,同时存在机具尺寸过大、不适于中小地块作业等问题。
技术实现要素:
3.本实用新型提供一种马铃薯自动捡拾装置,是一种适用于马铃薯的捡拾装置,可以有效地解决现有马铃薯收获机结构尺寸大、伤薯率高的缺陷。
4.为了解决上述技术问题,本实用新型提供一种马铃薯自动捡拾装置,包括收集箱、升运装置、挡板、笛卡尔机械臂、捡拾装置、水平输送装置和机架。所述收集箱固定在机架上方,保证重心位置;所述升运装置、挡板、笛卡尔机械臂和水平输送装置固定在机架上;所述捡拾装置固定在笛卡尔机械臂上。
5.作为本实用新型的一种优选技术方案,所述收集箱固定在机架上方,在收集马铃薯之后,保证整机重心位置。
6.作为本实用新型的一种优选技术方案,所述捡拾装置最大可以伸缩30cm,可以保证抓取的马铃薯放置到水平输送装置上。
7.作为本实用新型的一种优选技术方案,所述升运装置速度大于水平输送装置速度,保证升运装置下方不会拥堵。
8.本实用新型所达到的有益效果是:该种马铃薯自动捡拾装置结构简单、体积小,可以在丘陵地区进行捡拾作业,减少人工成本的投入,特别适用于大型马铃薯收获机械不方便进入的区域。
附图说明
9.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
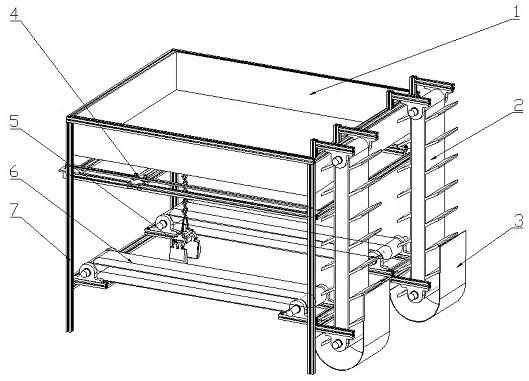
10.图1是本实用新型的结构示意图。
11.图中:1、收集箱;2、升运装置;3、挡板;4、笛卡尔机械臂;5、捡拾装置;6、水平输送装置;7、机架。
具体实施方式
12.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
13.实施例1
14.如图1所示,本实用新型一种马铃薯自动捡拾装置,包括收集箱(1)、升运装置(2)、挡板(3)、笛卡尔机械臂(4)、捡拾装置(5)、水平输送装置(6)和机架(7)。所述收集箱(1)固定在机架(7)上方,保证重心位置;所述升运装置(2)、挡板(3)、笛卡尔机械臂(4)和水平输送装置(6)固定在机架(7)上;所述捡拾装置(5)固定在笛卡尔机械臂(4)上。
15.进一步的,收集箱(1)固定在机架(7)上方,在收集马铃薯之后,保证整机重心位置。
16.进一步的,升运装置(2)逆时针运动,在挡板(3)的作用下,将马铃薯升运到收集箱(1)。
17.进一步的,捡拾装置(5)最大可以伸缩30cm,保证抓取马铃薯和放置马铃薯到水平输送装置(6)上。
18.进一步的,升运装置(2)和水平输送装置(6)皆以减速电机为动力源,且升运装置(2)速度大于水平输送装置(6)速度。
19.进一步的,升运装置(2)刮板与带平面有60度夹角,对马铃薯有支撑作用。
20.本实用新型的工作原理:马铃薯自动捡拾装置通过笛卡尔机械臂(4)的水平移动,带动捡拾装置(5)捡拾马铃薯,捡拾装置(5)将马铃薯放在水平输送装置(6)上,有水平输送装置(6)输送马铃薯到升运装置(2),在挡板(3)的作用下,升运装置(2)将马铃薯送入收集箱(1),实现整机自动捡拾功能。
21.本实用新型为一种马铃薯自动捡拾装置,采用笛卡尔直角坐标系进行捡拾工作,整机体积小,适合于丘陵山区作业。
22.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种马铃薯自动捡拾装置,其特征在于包括收集箱(1)、升运装置(2)、挡板(3)、笛卡尔机械臂(4)、捡拾装置(5)、水平输送装置(6)和机架(7),所述升运装置(2)、挡板(3)、笛卡尔机械臂(4)和水平输送装置(6)固定在机架(7)上;所述捡拾装置(5)固定在笛卡尔机械臂(4)上。2.根据权利要求1所述的一种马铃薯自动捡拾装置,其特征在于:所述收集箱(1)固定在机架(7)上方,在收集马铃薯之后,保证整机重心位置。3.根据权利要求1所述的一种马铃薯自动捡拾装置,其特征在于:所述升运装置(2)逆时针运动,在挡板(3)的作用下,将马铃薯升运到收集箱(1)。4.根据权利要求1所述的一种马铃薯自动捡拾装置,其特征在于:所述捡拾装置(5)最大可以伸缩30cm,保证抓取马铃薯和放置马铃薯到水平输送装置(6)上。5.根据权利要求1所述的一种马铃薯自动捡拾装置,其特征在于:所述升运装置(2)和水平输送装置(6)皆以减速电机为动力源,且升运装置(2)速度大于水平输送装置(6)速度。6.根据权利要求1所述的一种马铃薯自动捡拾装置,其特征在于:所述升运装置(2)刮板与带平面有60度夹角,对马铃薯有支撑作用。
技术总结
本实用新型公开了一种马铃薯自动捡拾装置,包括收集箱、升运装置、挡板、笛卡尔机械臂、捡拾装置、水平输送装置和机架。所述收集箱固定在机架上方,保证重心位置;所述升运装置、挡板、笛卡尔机械臂和水平输送装置固定在机架上;所述捡拾装置固定在笛卡尔机械臂上。马铃薯自动捡拾装置通过笛卡尔机械臂的水平移动,带动捡拾装置捡拾马铃薯,捡拾装置将马铃薯放在水平输送装置上,有水平输送装置输送马铃薯到升运装置,在挡板的作用下,升运装置将马铃薯送入收集箱,实现整机自动捡拾功能。实现整机自动捡拾功能。实现整机自动捡拾功能。
技术研发人员:陈军 李传林 蔡皓轩 孙丽娟 陈超 张是夏
受保护的技术使用者:西北农林科技大学
技术研发日:2021.12.16
技术公布日:2022/5/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1