农作业支援装置、农作业支援系统、农业机械的制作方法
本发明涉及一边在田地中行驶一边进行农作业的农业机械与支援该农作业的农作业支援装置以及农作业支援系统。
背景技术:
1、在专利文献1中公开了支援一边在田地中使农业机械行驶、一边利用连结于该农业机械的作业装置来进行农作业的情况的技术。专利文献1所公开的农业机械具备取得部、作业设定部、测量装置以及显示装置。取得部取得田地的外周部的位置数据。作业设定部基于田地的外周部的位置数据,设定用于一边使农业机械在田地中行驶一边利用作业装置进行农作业的作业开始结束线、畦头线、作业行驶线、作业开始位置以及作业结束位置。测量装置检测农业机械的位置。显示装置显示作业开始结束线、畦头线、作业行驶线、作业开始位置、作业结束位置以及行驶车身的位置。
2、现有技术文献
3、专利文献
4、专利文献1:日本公开专利公报“日本特开2018-39号公报”
技术实现思路
1、发明将要解决的课题
2、在专利文献1的技术中,在田地中利用农业机械进行农作业之前,通过观察显示装置的显示,能够预先掌握农业机械行驶的作业行驶线(直线)、作业装置开始以及结束农作业的位置(点)等,但不能预先掌握可通过作业装置进行农作业的部分。因此,在田地中,也不能掌握不可利用作业装置进行农作业的部分,较为不便,有作业效率降低的隐患。
3、因此,本发明鉴于上述问题,其目的在于提高利用农业机械进行农作业时的便利性与作业效率。
4、用于解决课题的手段
5、用于解决上述的技术课题的本发明的技术手段的特征在于以下所示的点。
6、本发明的一方式的农作业支援装置具备:制作在登记的田地中使农业机械行驶的行驶线路的线路制作部;以及显示部,其显示预测在农业机械基于行驶线路行驶的同时利用连结于该农业机械的作业装置进行农作业的作业部分、或者预测不利用作业装置进行农作业的未作业部分。
7、另外,在本发明的一方式中,显示部显示预测在农业机械基于行驶线路通过自动驾驶而行驶的同时利用作业装置进行农作业的作业部分或者预测不利用作业装置进行农作业的未作业部分。
8、另外,在本发明的一方式中,显示部以不同的显示方式显示所述预测的作业部分与所述预测的未作业部分。
9、另外,在本发明的一方式中,显示部显示在农业机械基于行驶线路行驶的同时利用作业装置进行了农作业的实际的作业部分或者未利用作业装置进行农作业的实际的未作业部分。
10、另外,在本发明的一方式中,显示部显示在农业机械基于行驶线路通过自动驾驶而行驶的同时利用作业装置进行了农作业的实际的作业部分或者未利用作业装置进行农作业的实际的未作业部分。
11、另外,在本发明的一方式中,显示部以不同的显示方式显示所述实际的作业部分与实际的未作业部分。
12、另外,在本发明的一方式中,农作业支援装置具备轨迹运算部,该轨迹运算部基于能够由作业装置进行作业的作业宽度与行驶线路,运算成为所述预测的作业部分的作业装置的预测作业轨迹,显示部将预测作业轨迹与田地以及行驶线路一同显示。
13、另外,在本发明的一方式中,农作业支援装置具备:输入部,其输入作业装置的作业宽度的重叠量或者表示在田地的内侧沿该田地的轮廓设定的畦头的数量的畦头数;以及区域设定部,其基于作业宽度、重叠量、或者畦头数,设定包含畦头的第一区域与位于该第一区域的内侧的第二区域,线路制作部在第一区域以及第二区域制作行驶线路,轨迹运算部至少基于在第二区域制作的行驶线路来运算预测作业轨迹。
14、另外,在本发明的一方式中,根据输入部的输入内容的变更更新行驶线路、预测作业轨迹以及显示部的显示。
15、另外,在本发明的一方式中,轨迹运算部基于在农业机械基于行驶线路行驶的同时利用作业装置进行农作业时的农业机械的位置与作业宽度,运算作为实际的作业部分的实际的作业轨迹,显示部将农业机械的位置以及实际的作业轨迹与田地以及行驶线路一同显示。
16、另外,在本发明的一方式中,农作业支援装置具备存储多个预测作业轨迹以及实际的作业轨迹的存储部,显示部以不同的方式显示存储于存储部的预测作业轨迹以及实际的作业轨迹中的两个以上。
17、另外,在本发明的一方式中,在农业机械基于行驶线路通过自动驾驶而行驶的同时利用作业装置进行农作业的情况下,轨迹运算部能够运算预测作业轨迹以及实际的作业轨迹,显示部能够显示预测作业轨迹、实际的作业轨迹、所预测的未作业部分以及实际的未作业部分。
18、本发明的一方式的农作业支援系统包含:所述农作业支援装置;以及农业机械,其能够行驶且能够连结用于进行农作业的作业装置。
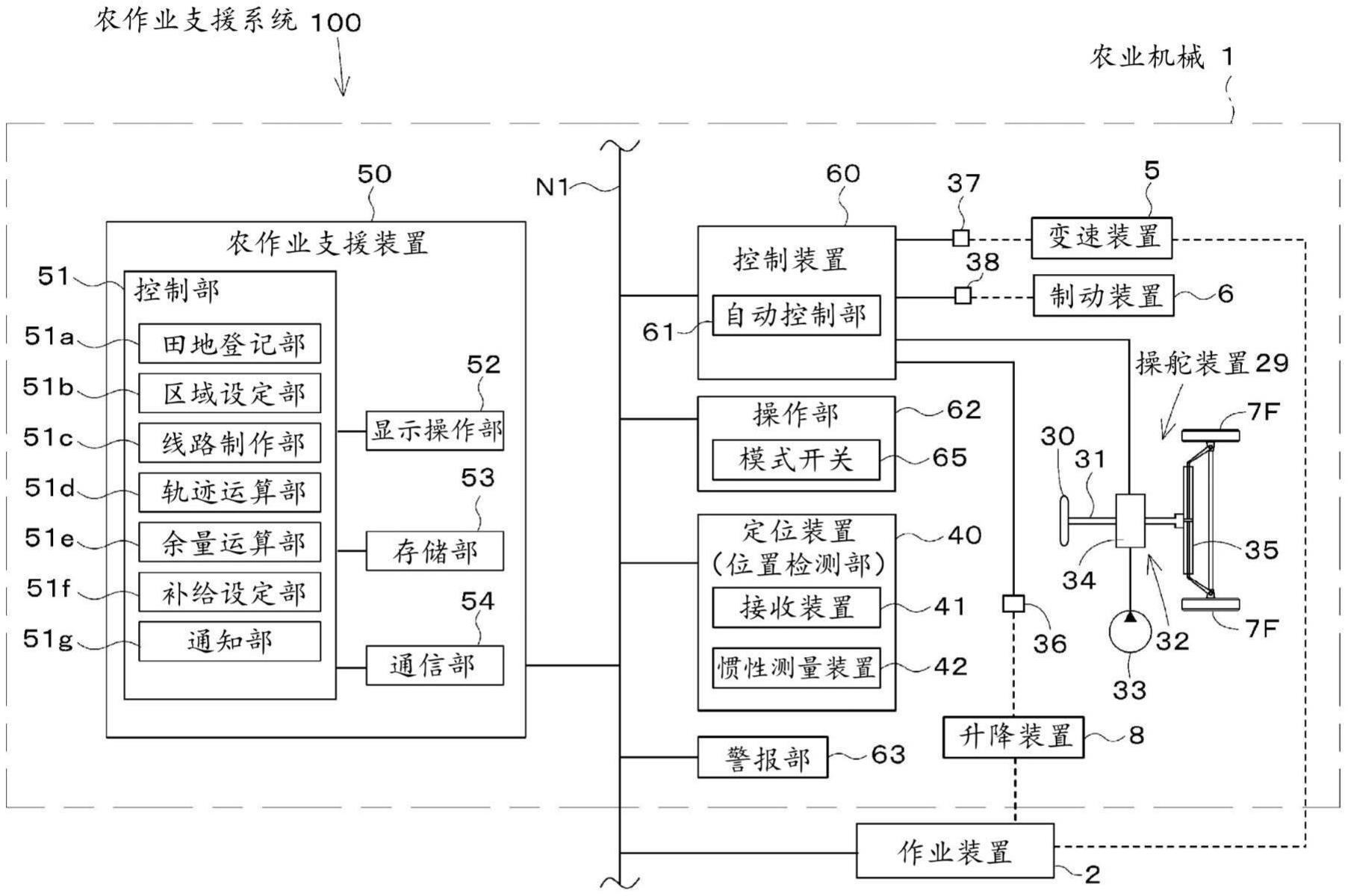
19、另外,在本发明的一方式中,农作业支援系统包含:检测农业机械的位置的位置检测部;以及自动控制部,其执行一边使农业机械通过自动驾驶而行驶一边利用连结于该农业机械的作业装置进行农作业的自动行驶作业模式,农作业支援装置、位置检测部与自动控制部配备于农业机械,自动控制部基于由农作业支援装置所具备的线路制作部制作的行驶线路与由位置检测部检测出的农业机械的位置,执行自动行驶作业模式。
20、本发明的一方式的农业机械具有所述农作业支援装置、能够行驶的行驶车身、能够将用于进行农作业的作业装置连结于行驶车身的连结部、及检测行驶车身的位置的位置检测部。
21、而且,在本发明的一方式中,农业机械具有自动控制部,该自动控制部执行一边使行驶车身通过自动驾驶而行驶一边利用作业装置进行农作业的自动行驶作业模式。
22、发明效果
23、根据本发明,能够提高利用农业机械进行农作业时的便利性与作业效率。
技术特征:
1.一种农作业支援装置,其特征在于,具备:
2.根据权利要求1所述的农作业支援装置,其特征在于,
3.根据权利要求1或2所述的农作业支援装置,其特征在于,
4.根据权利要求1至3中任一项所述的农作业支援装置,其特征在于,
5.根据权利要求4所述的农作业支援装置,其特征在于,
6.根据权利要求4或5所述的农作业支援装置,其特征在于,
7.根据权利要求1至6中任一项所述的农作业支援装置,其特征在于,
8.根据权利要求7所述的农作业支援装置,其特征在于,具备:
9.根据权利要求8所述的农作业支援装置,其特征在于,
10.根据权利要求7至9中任一项所述的农作业支援装置,其特征在于,
11.根据权利要求10所述的农作业支援装置,其特征在于,
12.一种农作业支援系统,其特征在于,包含:
13.根据权利要求12所述的农作业支援系统,其特征在于,包含:
14.一种农业机械,其特征在于,具有:
15.根据权利要求14所述的农业机械,其特征在于,
技术总结
农作业支援装置(50)具备:制作在登记的田地(MP2)中使农业机械(1)行驶的行驶线路(L1)的线路制作部(51c);以及显示部(52),其显示预测在农业机械(1)基于行驶线路(L1)行驶的同时利用连结于该农业机械(1)的作业装置(2)进行农作业的作业部分(J1)、或者预测不利用作业装置(2)进行农作业的未作业部分(V1)。农作业支援系统(100)包含农作业支援装置(50)与农业机械(1)。农业机械(1)具有农作业支援装置(50)、行驶车身(3)、能够将作业装置(2)连结于行驶车身(3)的连结部(8g、8h)以及检测行驶车身(3)的位置的位置检测部(40)。
技术研发人员:洼岛亮,作田建,玉谷健二,吉村史也
受保护的技术使用者:株式会社久保田
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!