一种智能割草机的制作方法
本申请涉及割草机,具体涉及一种智能割草机。
背景技术:
1、随着城市建设的发展,居民环保认识的提高,城市绿化水平已成为衡量一个城市发展水平和居民生活质量的标准。近些年,城市广场和生活小区的绿地日益增多,对于草坪的维护工作量日渐繁重,人们开始尝试利用智能机器技术实现智能化割草。各厂商纷纷推出了各自的智能割草机产品,并力求在控制成本的前提下,寻找更加安全,简捷,高效的割草方法,为用户提供更智能化的服务。
2、目前的智能割草机通常利用天线实现机器定位,然而目前智能割草机上的天线由于设计不合理,对天线的测距精度及测距距离造成不良影响,进而影响智能割草机的定位功能实现。
技术实现思路
1、本申请提供一种智能割草机,不仅有利于保证天线组件的测距精度及测距距离,还能够提升智能割草机的越障能力。
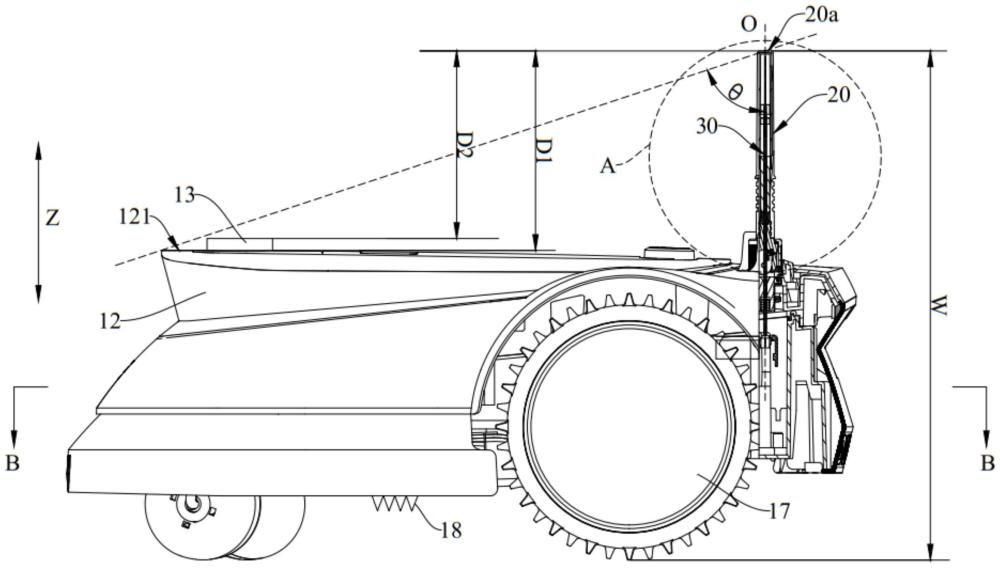
2、本申请提供一种智能割草机。智能割草机包括:机架,机架包括外壳,外壳具有向上的壳顶面;行走机构,设置于机架,用于带动机架运动;执行机构,设置于机架,用于执行切割任务;天线装置,装配于机架,天线装置自机架向上延伸并伸出壳顶面;天线装置远离机架的端部为目标端部;目标端部和壳顶面的最高点的连线与天线装置的中心轴线构成目标夹角,目标夹角为60°至75°。
3、在本申请的一实施例中,在高度方向上,目标端部与外壳之间具有第一最小距离,第一最小距离d大于或等于60mm。
4、在本申请的一实施例中,第一最小距离大于或等于140mm。
5、在本申请的一实施例中,第一最小距离小于或等于190mm。
6、在本申请的一实施例中,机架还具有镜头;其中,镜头相对外壳朝目标端部的所在侧凸出设置,且在高度方向上,目标端部与镜头之间具有第二最小距离,第二最小距离大于或等于130mm。
7、在本申请的一实施例中,第二最小距离小于或等于180mm。
8、在本申请的一实施例中,在高度方向上,目标端部与行走机构之间具有最大距离,最大距离大于或等于400mm。
9、在本申请的一实施例中,最大距离小于或等于450mm。
10、在本申请的一实施例中,机架还定义有垂直于高度方向的行进方向,且机架还具有:镜头;散热片组件,邻近镜头设置;以及电机,镜头和散热片组件位于电机在行进方向上的一侧,天线装置位于电机在行进方向上的另一侧。
11、在本申请的一实施例中,机架还定义有垂直于高度方向的左右方向,且机架还具有:主板;以及电机,主板位于电机在左右方向上的一侧,天线装置位于电机在左右方向上的另一侧。
12、本申请的有益效果是:区别于现有技术,本申请提供一种智能割草机。该智能割草机的天线组件的至少部分处于机架的外部。并且,天线组件远离机架的端部为目标端部,外壳在高度方向上距离目标端部最近的位置为目标位置,目标端部和目标位置的连线与天线装置的中心轴线构成目标夹角。本申请通过设置目标夹角为60°至75°,以合理设置天线组件的高度,不仅使得天线组件的目标端部与智能割草机的外壳之间具有足够的距离,能够降低外壳对天线信号的干扰,有利于保证天线组件的测距精度及测距距离,进而保证智能割草机的定位功能实现;并且,还能够避免天线组件的高度过高,进而能够提升智能割草机的越障能力。
技术特征:
1.一种智能割草机,其特征在于,包括:
2.根据权利要求1所述的智能割草机,其特征在于,
3.根据权利要求2所述的智能割草机,其特征在于,
4.根据权利要求2所述的智能割草机,其特征在于,
5.根据权利要求1所述的智能割草机,其特征在于,
6.根据权利要求5所述的智能割草机,其特征在于,
7.根据权利要求1至6中任一项所述的智能割草机,其特征在于,
8.根据权利要求7所述的智能割草机,其特征在于,
9.根据权利要求1所述的智能割草机,其特征在于,
10.根据权利要求1所述的智能割草机,其特征在于,
技术总结
本申请公开了一种智能割草机。该智能割草机包括:机架,机架包括外壳,外壳具有向上的壳顶面;行走机构,设置于机架,用于带动机架运动;执行机构,设置于机架,用于执行切割任务;天线装置,装配于机架,天线装置自机架向上延伸并伸出壳顶面;天线装置远离机架的端部为目标端部;目标端部和壳顶面的最高点的连线与天线装置的中心轴线构成目标夹角,目标夹角为60°至75°。通过上述方式,本申请不仅能够有利于保证天线组件的测距精度及测距距离,还能够提升智能割草机的越障能力。
技术研发人员:袁朋,李晓菲,吴永东
受保护的技术使用者:科沃斯机器人股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!