自移动设备及用于自移动设备的轮毂电机的制作方法
本申请涉及机械控制,尤其涉及一种自移动设备及用于自移动设备的轮毂电机。
背景技术:
1、随着自动控制技术发展,智能化设备在家庭生活及工业生产等领域得到广泛推广。智能割草机作为一种集成自主移动及割草等功能的智能机器人,极大地提高了庭院及城市绿化维护效率。
2、现有的智能割草机,通常将行走电机和割草电机设置在机身外壳内,内置行走电机通过齿轮驱动机构等驱动组件驱动行走轮行走,现有的机身机构存在以下问题:机身体积较大,且行走电机与行走轮之间的驱动组件增加了机身重量和安装复杂度,在庭院绿化场景下,大体积、高重量的割草机会造成使用和挪移不便,影响用户使用体验。
技术实现思路
1、本申请提供了一种自移动设备,以解决现有的智能割草机体积大、重量高的问题,减小整机尺寸。
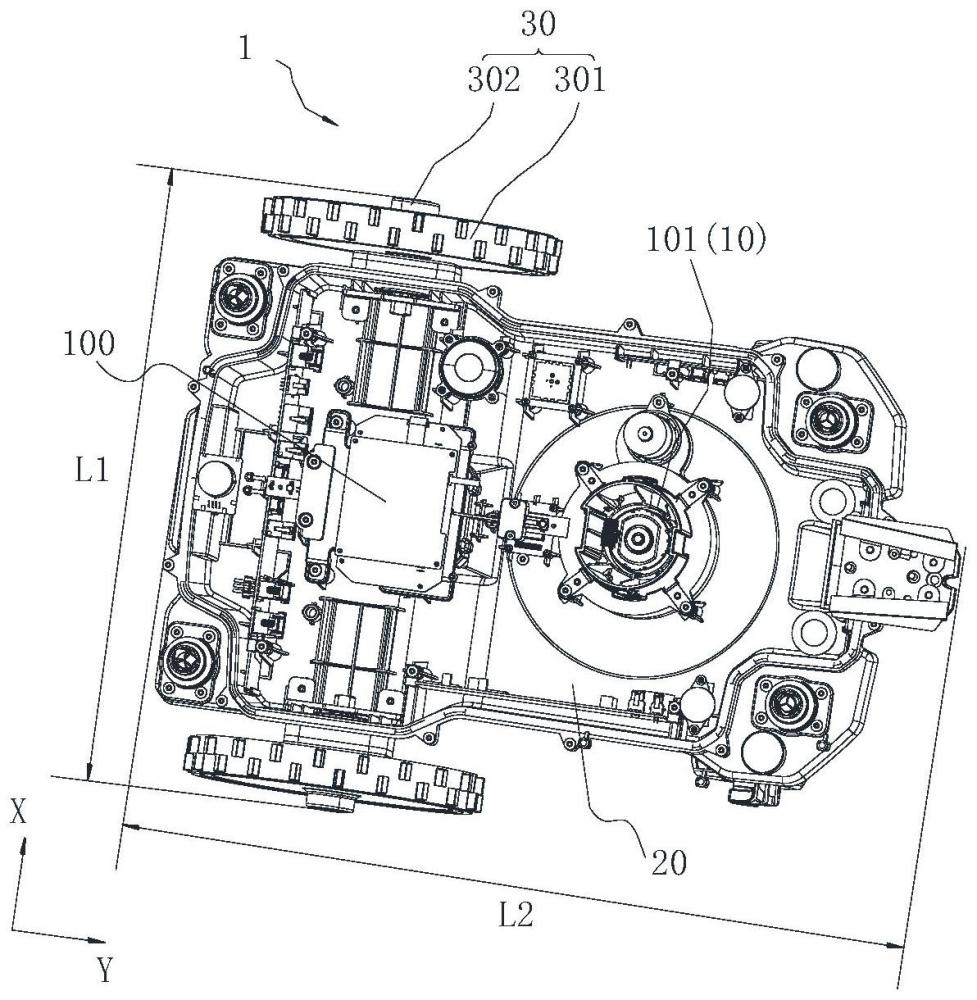
2、根据本申请的一方面,提供了一种自移动设备,包括:切割组件,用于切割植被;主体,用于支撑所述切割组件;行走系统,用于带动所述主体移动;所述行走系统至少包括:行走轮;轮毂电机,所述轮毂电机集成设置于所述行走轮内;所述轮毂电机的径向长度大于或者等于18厘米,且小于或者等于33厘米;所述轮毂电机的轴向厚度小于或者等于3.5厘米。
3、可选地,所述轮毂电机的能量密度大于或者等于0.05w/cm3,且小于或者等于0.5w/cm3。
4、可选地,所述轮毂电机的散热面积大于或等于50cm2且小于或等于300cm2。
5、可选地,所述轮毂电机的磁极对数大于或者等于26对。
6、可选地,所述轮毂电机的槽满率大于45%。
7、可选地,所述轮毂电机的输出功率大于或者等于1w。
8、可选地,所述轮毂电机与所述行走轮之间的驱动方式为直驱方式。
9、可选地,所述轮毂电机的轮毂宽度与所述自移动设备的整机重量正相关。
10、可选地,在所述整机重量大于或者等于10kg,且小于或者等于20kg之时,所述轮毂宽度大于或者等于3厘米,且小于或者等于4厘米;在所述整机重量大于20kg,且小于或者等于40kg之时,所述轮毂宽度大于4厘米,且小于或者等于6厘米;在所述整机重量大于40kg,且小于或者等于60kg之时,所述轮毂宽度大于6厘米,且小于或者等于9厘米。
11、可选地,所述自移动设备还包括连接件,所述连接件用于将所述轮毂电机可拆卸安装于所述主体的壳体上。
12、根据本申请的另一方面,提供了一种用于自移动设备的轮毂电机,所述自移动设备包括行走轮,所述轮毂电机集成在所述行走轮内;所述轮毂电机的径向长度大于或者等于18厘米,且小于或者等于33厘米;所述轮毂电机的轴向厚度小于或者等于3.5厘米。
13、本申请实施例的技术方案,将轮毂电机集成设置于行走轮内;并设置轮毂电机的径向长度大于或者等于18厘米,且小于或者等于33厘米;轮毂电机的轴向厚度满足:小于或者等于3.5厘米,通过对调整轮毂电机的外形尺寸及轮毂电机的布置位置,将轮毂电机集成设置于行走轮内,轮毂电机与行走轮之间的驱动方式为直驱方式,省去齿轮箱等驱动组件,可直接适配自移动设备1原有的外形结构,避免替换电机造成的机身壳体变更,结构通用性强,有利于简化电机装配工艺,节省生产成本。
14、应当理解,本部分所描述的内容并非旨在标识本申请的实施例的关键或重要特征,也不用于限制本申请的范围。本申请的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种自移动设备,包括:
2.根据权利要求1所述的自移动设备,其特征在于,所述轮毂电机的能量密度大于或者等于0.05w/cm3,且小于或者等于0.5w/cm3。
3.根据权利要求1所述的自移动设备,其特征在于,所述轮毂电机的散热面积大于或等于50cm2且小于或等于300cm2。
4.根据权利要求1所述的自移动设备,其特征在于,所述轮毂电机的磁极对数大于或者等于26对。
5.根据权利要求1所述的自移动设备,其特征在于,所述轮毂电机的槽满率大于45%。
6.根据权利要求1所述的自移动设备,其特征在于,所述轮毂电机的输出功率大于或者等于1w。
7.根据权利要求1所述的自移动设备,其特征在于,所述轮毂电机与所述行走轮之间的驱动方式为直驱方式。
8.根据权利要求1-7中任一项所述的自移动设备,其特征在于,所述轮毂电机的轮毂宽度与所述自移动设备的整机重量正相关。
9.根据权利要求8所述的自移动设备,其特征在于,在所述整机重量大于或者等于10kg,且小于或者等于20kg之时,所述轮毂宽度大于或者等于3厘米,且小于或者等于4厘米;
10.根据权利要求1-7中任一项所述的自移动设备,其特征在于,还包括连接件,所述连接件用于将所述轮毂电机可拆卸安装于所述主体的壳体上。
11.一种用于自移动设备的轮毂电机,所述自移动设备包括行走轮,其特征在于,
技术总结
本发明公开了一种自移动设备及用于自移动设备的轮毂电机,该自移动设备包括:切割组件,用于切割植被;主体,用于支撑切割组件;行走系统,用于带动主体移动;该行走系统至少包括:行走轮;轮毂电机,轮毂电机集成设置于行走轮内;轮毂电机的径向长度满足:大于或者等于18厘米,且小于或者等于33厘米;轮毂电机的轴向厚度满足:小于或者等于3.5厘米。通过扁平化设计实现电机与行走轮之间的适配,在不改变行走轮及整机外形尺寸的前提下,实现电机与行走轮的集成设计,无需内置行走电机及齿轮驱动组件,结构通用性强,安装方便,有利于减小整机尺寸和整机重量。
技术研发人员:胡成龙,耿垭洲,许海深,陈佚聪
受保护的技术使用者:南京泉峰科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!