一种基于深度学习的分布式辣椒花自动授粉装置及方法
本发明属于辣椒花自动授粉,尤其涉及一种基于深度学习的分布式辣椒花自动授粉装置及方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、针对雄性不育系为母本的辣椒“三系配套”杂交制种技术,需要先识别不育系花朵后,将携带的恢复系花粉授在不育系花朵上而生产出杂交种。其中,三系是指雄性不育系、雄性不育保持系、恢复系。雄性不育系是指雄蕊没有花粉、雌蕊正常、只开花不结果的亲本材料;雄性不育保持系是指其花粉为不育系授粉后能结果结籽,其后代仍为不育系的亲本材料;恢复系是指其花粉授在不育系上后,能结果结籽,生产出的杂交种恢复了育性,用于产品生产。发明人发现,目前辣椒“三系配套”杂交制种的授粉作业仍以人力为主,这样使得授粉作业成为耗时最长、工作量最大、投入最多的环节。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供一种基于深度学习的分布式辣椒花自动授粉装置及方法,其可实现在辣椒大棚中巡逻工作,自动识别待授粉的辣椒花并进行自动授粉,工作模式为多机协作分布式,能在较短时间内完成当前场地内的辣椒花授粉工作。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供了一种基于深度学习的分布式辣椒花自动授粉装置。
4、一种基于深度学习的分布式辣椒花自动授粉装置,其包括若干个相互通信的机器人;每个机器人包括本体、机械臂末端执行器、多组深度相机和深度学习控制板卡;每组深度相机用于采集相应维度的辣椒花深度图像并传至深度学习控制板卡;所述深度学习控制板卡用于:
5、识别当前辣椒花深度图像中所有待授粉辣椒花的中心点;
6、逐一计算各个待授粉辣椒花的中心点与对应深度相机间的三维位置信息;
7、基于深度相机与机械臂末端执行器的三维坐标转换关系,确定出机械臂末端执行器与各个待授粉辣椒花的中心点的三维位置信息,以控制机械臂末端执行器进行授粉动作;
8、在当前辣椒花深度图像中所有目标完成授粉后,计算当前机器人完成进度;
9、将当前机器人完成进度发送至其他相互通信的机器人,并接收其他相互通信的机器人的完成进度,以控制当前机器人执行下一步动作。
10、作为一种实施方式,在所述深度学习控制板卡中,识别当前辣椒花深度图像中的待授粉辣椒花的过程为:
11、提取所述多维辣椒花深度图像中的辣椒花姿态特征;
12、当姿态特征为正向时,判定相应辣椒花为待授粉花朵并进行标注;其中,正向为所有花瓣均无遮挡且花心完全暴露。
13、作为一种实施方式,所述辣椒花的姿态特征还包括水平、倾斜和竖直;
14、水平为花瓣未闭合且花心朝向垂直于图像拍摄方向;
15、倾斜为花瓣未闭合,部分花瓣可见,花心朝向与图像拍摄方向呈一定角度;
16、竖直为呈现花骨朵状态,花心被完全包裹住。
17、作为一种实施方式,在所述深度学习控制板卡中,识别当前辣椒花深度图像中的待授粉辣椒花之前,还包括:
18、识别出当前辣椒花深度图像中的所有辣椒花。
19、作为一种实施方式,在所述深度学习控制板卡中,识别当前辣椒花深度图像中的所有辣椒花的过程为:
20、基于预先训练完成的辣椒花识别模型提取当前辣椒花深度图像中的颜色及形状特征,判断出当前辣椒花深度图像中是否存在辣椒花以及辣椒花的位置。
21、作为一种实施方式,在所述深度学习控制板卡中,完成进度为当前已行驶距离与任务轨迹总距离的比值。
22、作为一种实施方式,所述深度学习控制板卡还用于:
23、判断当前机器人是否完成任务,若否,则控制当前机器人继续执行任务;若是,则控制当前机器人停止运行当前任务,寻找其它未完成任务的机器人并分配相应任务进行执行。
24、作为一种实施方式,所述深度相机至少为三组。
25、本发明的第二个方面提供了一种基于深度学习的分布式辣椒花自动授粉装置的控制方法。
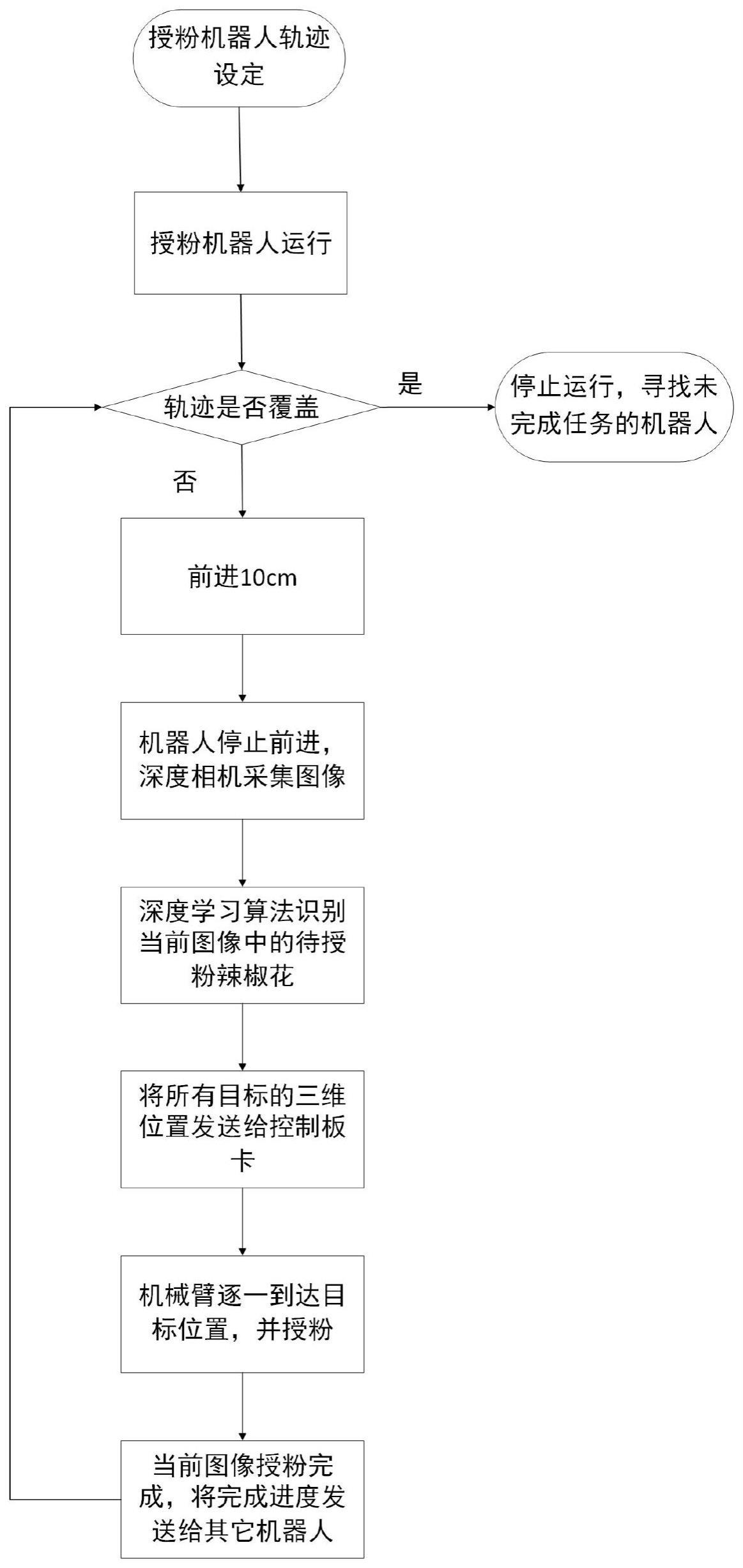
26、一种基于深度学习的分布式辣椒花自动授粉装置的控制方法,包括:
27、接收深度相机传送来的多维辣椒花深度图像;
28、识别当前辣椒花深度图像中所有待授粉辣椒花的中心点;
29、逐一计算各个待授粉辣椒花的中心点与对应深度相机间的三维位置信息;
30、基于深度相机与机械臂末端执行器的三维坐标转换关系,确定出机械臂末端执行器与各个待授粉辣椒花的中心点的三维位置信息,以控制机械臂末端执行器进行授粉动作;
31、在当前辣椒花深度图像中所有目标完成授粉后,计算当前机器人完成进度;
32、将当前机器人完成进度发送至其他相互通信的机器人,并接收其他相互通信的机器人的完成进度,以控制当前机器人执行下一步动作。
33、作为一种实施方式,该控制方法,还包括:
34、判断当前机器人是否完成任务,若否,则控制当前机器人继续执行任务;若是,则控制当前机器人停止运行当前任务,寻找其它未完成任务的机器人并分配相应任务进行执行。
35、与现有技术相比,本发明的有益效果是:
36、本发明结合深度学习及机器人分布式布设技术,研发了一种基于深度学习的分布式辣椒花自动授粉装置及方法,其可实现机器人在辣椒种植大棚中巡逻工作,自动识别待授粉的辣椒花并进行自动授粉,工作模式为多机协作分布式,能在较短时间内完成当前场地内的辣椒花授粉工作。
37、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种基于深度学习的分布式辣椒花自动授粉装置,其特征在于,包括若干个相互通信的机器人;每个机器人包括本体、机械臂末端执行器、多组深度相机和深度学习控制板卡;每组深度相机用于采集相应维度的辣椒花深度图像并传至深度学习控制板卡;所述深度学习控制板卡用于:
2.如权利要求1所述的基于深度学习的分布式辣椒花自动授粉装置,其特征在于,在所述深度学习控制板卡中,识别当前辣椒花深度图像中的待授粉辣椒花的过程为:
3.如权利要求2所述的基于深度学习的分布式辣椒花自动授粉装置,其特征在于,所述辣椒花的姿态特征还包括水平、倾斜和竖直;
4.如权利要求1所述的基于深度学习的分布式辣椒花自动授粉装置,其特征在于,在所述深度学习控制板卡中,识别当前辣椒花深度图像中的待授粉辣椒花之前,还包括:
5.如权利要求4所述的基于深度学习的分布式辣椒花自动授粉装置,其特征在于,在所述深度学习控制板卡中,识别当前辣椒花深度图像中的所有辣椒花的过程为:
6.如权利要求1所述的基于深度学习的分布式辣椒花自动授粉装置,其特征在于,在所述深度学习控制板卡中,完成进度为当前已行驶距离与任务轨迹总距离的比值。
7.如权利要求1所述的基于深度学习的分布式辣椒花自动授粉装置,其特征在于,所述深度学习控制板卡还用于:
8.如权利要求1所述的基于深度学习的分布式辣椒花自动授粉装置,其特征在于,所述深度相机至少为三组。
9.一种如权利要求1-8中任一项所述的基于深度学习的分布式辣椒花自动授粉装置的控制方法,其特征在于,包括:
10.如权利要求9所述的基于深度学习的分布式辣椒花自动授粉装置的控制方法,其特征在于,该控制方法,还包括:
技术总结
本发明属于辣椒花自动授粉技术领域,提供基于深度学习的分布式辣椒花自动授粉装置及方法。其中该装置包括若干个相互通信的机器人;每个机器人包括本体、机械臂末端执行器、多组深度相机和深度学习控制板卡;深度学习控制板卡用于识别当前辣椒花深度图像中所有待授粉辣椒花的中心点;逐一计算各个待授粉辣椒花的中心点与对应深度相机间的三维位置信息;确定出机械臂末端执行器与各个待授粉辣椒花的中心点的三维位置信息,以控制机械臂末端执行器进行授粉动作;在当前辣椒花深度图像中所有目标完成授粉后,计算当前机器人完成进度;将当前机器人完成进度发送至其他相互通信的机器人,并接收其他相互通信的机器人的完成进度,以控制当前机器人执行下一步动作。
技术研发人员:尚勇,徐欣,曹璐
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!