一种用于割草机器人的行走控制方法与流程
本发明属于割草机,尤其涉及一种用于割草机器人的行走控制方法。
背景技术:
1、割草机器人是一种能够在道路和户外连续的、实时的自主移动的智能机器人。智能割草机器人作为自行走设备的一种,适用于清理丘陵、梯田、平原等地块的植被,以及草坪之内的杂草。其操作简单,工作效率高。
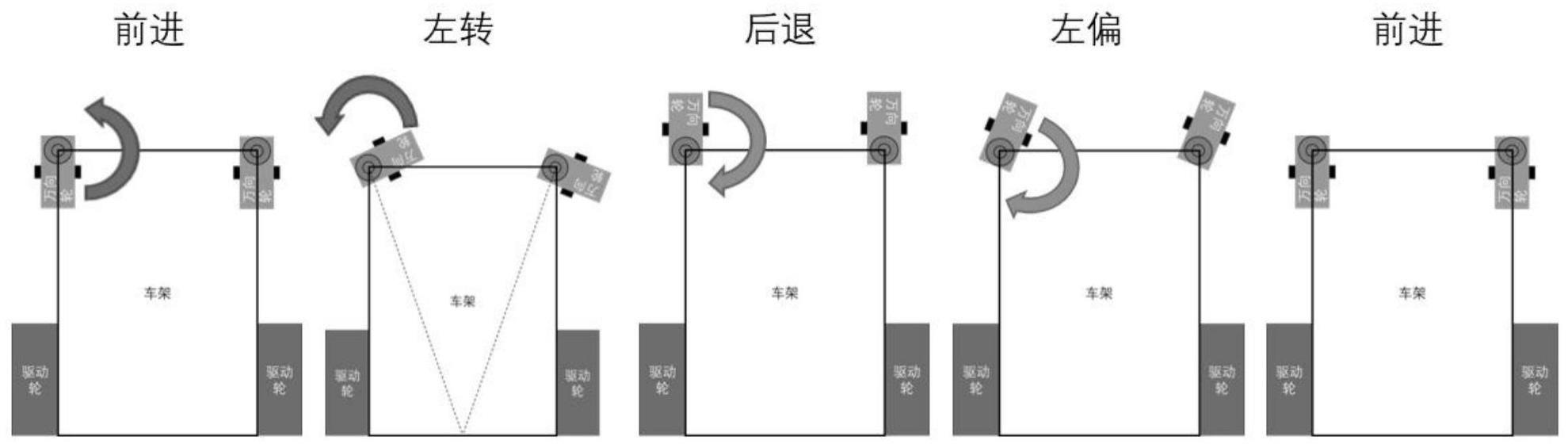
2、常见的割草机器人的前轮可采用万向轮,后轮为驱动轮,万向轮是所谓的活动脚轮,它的结构允许水平360度旋转。机器人在转向时通过后轮转向,前轮可根据转向方向自行旋转,这样的结构在实际工作时,万向轮容易发生缠草的风险,尤其是万向轮发生360度旋转的时候,例如图1中,机器在前进过程中接收左转、后退、再前进的指令,从前进切换到左转时,万向轮逆时针转动,从左转切换到后退时万向轮接着逆时针转动(即逆时针旋转了180度),最后从后退切换至前进时假设又发生了逆时针转动(即又逆时针旋转了180度),这时万向轮的转动方向不受控,从整个过程看,万向轮发生了360度的旋转,同样地,在图3中万向轮发生了顺时针360度旋转。再结合图5,机器在左转过程中接收前进、右转、再左转的指令,从左转切换到前进时,万向轮顺时针转动,从前进切换到右转时接着发生了顺时针转动(即顺时针旋转了180度),最后从右转切换至左转时假设又发生了顺时针转动(即又顺时针旋转了180度),从整个过程看,万向轮发生了360度的旋转,同样地,在图7中万向轮发生了逆时针360度旋转。因此在机器改变运行方向时万向轮发生转动容易发生缠草的风险,转动角度越大,缠草风险和程度越大,给机器正常运行带来影响甚至破坏。
技术实现思路
1、本发明提供了一种用于割草机器人的行走控制方法,一定程度上减少甚至避免万向轮缠草的风险。
2、实现上述目的的技术解决方案为:
3、一种用于割草机器人的行走控制方法,包括以下步骤:
4、步骤一:启动机器,机器收到第一指令时,执行第一预定动作,然后执行第一指令;
5、步骤二:当机器在收到第一指令后收到新指令,判断新指令是反向指令还是非反向指令,当新指令为反向指令时,机器进入步骤三,当新指令是非反向指令时,机器直接执行新指令,当新指令与第一指令方向相反时,则新指令为反向指令,否则是非反向指令;
6、步骤三:机器先执行第二预定动作,然后执行新指令,
7、第二预定动作与第一预定动作方向相同。
8、进一步地,当第一预定动作与第二预定动作之间存在非反向指令时,第二预定动作与最后一个非反向指令方向相同;
9、当第一预定动作与第二预定动作之间不存在非反向指令时,第二预定动作与第一预定动作方向相同。
10、进一步地,所述第一指令、新指令、反向指令、非反向指令包括向左转向、向右转向、前进、后退。
11、进一步地,所述第一指令仅包括前进指令或者后退指令。
12、进一步地,所述第一预定动作和第二预定动作为向左转向或向右转向时,转向幅度不超过5°。
13、进一步地,所述指令是人工发送的指令或者是通过机器内部控制程序生产的指令。
14、进一步地,所述万向轮为机器的前轮。
15、进一步地,所述机器是智能割草机。
16、进一步地,在机器执行完新指令后执行一个补偿动作,所述补偿动作与第二预定动作方向相反,幅度相同。
17、与现有技术相比,本发明的优点包括:
18、本发明的控制方法,可以在新指令动作开始之前,设置有一个预定动作,用来控制遥控割草机执行指令时,万向轮复位的摆动方向,避免万向轮的360°旋转,减少缠草的情况,通过上述方法可以控制万向轮180度转弯时的旋转方向,即可以减少缠草风险。
技术特征:
1.一种用于割草机器人的行走控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的用于割草机器人的行走控制方法,其特征在于:
3.根据权利要求2所述的用于割草机器人的行走控制方法,其特征在于,所述第一指令、新指令、反向指令、非反向指令包括向左转向、向右转向、前进、后退。
4.根据权利要求2所述的用于割草机器人的行走控制方法,其特征在于:所述第一指令仅包括前进指令或者后退指令。
5.根据权利要求3或4所述的用于割草机器人的行走控制方法,其特征在于,所述第一预定动作和第二预定动作为向左转向或向右转向时,转向幅度不超过5°。
6.根据权利要求1所述的用于割草机器人的行走控制方法,其特征在于,所述指令是人工发送的指令或者是通过机器内部控制程序生产的指令。
7.根据权利要求1所述的用于割草机器人的行走控制方法,其特征在于,所述万向轮为机器的前轮。
8.根据权利要求1所述的用于割草机器人的行走控制方法,其特征在于,所述机器是智能割草机。
9.根据权利要求1-8任一项所述的用于割草机器人的行走控制方法,其特征在于,在机器执行完新指令后执行一个补偿动作,所述补偿动作与第二预定动作方向相反,幅度相同。
技术总结
本发明公开了一种用于割草机器人的行走控制方法,包括以下步骤:包括以下步骤:步骤一:启动机器,机器收到第一指令时,执行第一预定动作,然后执行第一指令;步骤二:当机器在收到第一指令后收到新指令,判断新指令是反向指令还是非反向指令,当新指令为反向指令时,机器进入步骤三,当新指令是非反向指令时,机器直接执行新指令,当新指令与第一指令方向相反时,则新指令为反向指令,否则是非反向指令;步骤三:机器先执行第二预定动作,然后执行新指令,第二预定动作与第一预定动作方向相同。本发明可以控制万向轮180度转弯时的旋转方向,即可以减少缠草风险。
技术研发人员:战洋,刘楷
受保护的技术使用者:南京苏美达智能技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!