一种白萝卜联合收获机
本发明涉及农用收获机械,具体涉及一种白萝卜联合收获机。
背景技术:
1、白萝卜是根茎类蔬菜,十字花科萝卜属植物,种植已有千年历史,是我国常见的蔬菜,在饮食和中医食疗领域有广泛应用。我国目前萝卜种植面积约133.2万hm2,萝卜收获面积和总产量均居世界第一。白萝卜的收获环节是最耗工费时的环节,也是机械化程度最低的环节。
2、白萝卜的机械化收获可以分为分段收获和联合收获两种,其中分段收获是通过机具将萝卜从地下拔出并切缨,再通过人工捡拾完成收获过程。而联合收获是指能够实现深松、挖掘、夹持、输送、切缨、收集等一体化作业的收获方式。
3、当前我国针对白萝卜收获的采收机械鲜有可闻,仍以人工收获为主,我国现有的白萝卜收获装备普遍存在功能单一、损失损伤率高、输送不畅、适用性较低等问题。
技术实现思路
1、本发明要解决的技术问题是克服现有技术存在的不足,提供一种多功能联合作业、场景适用性较强和实用性较强的白萝卜联合收获机。
2、为解决上述技术问题,本发明采用以下技术方案:
3、一种白萝卜联合收获机,包括行走底盘,所述行走底盘上设有机架,所述机架的前端安装有用于振动土壤进行松土的深松机构和用于将白萝卜缨叶搂起聚拢的搂叶机构,所述搂叶机构的后方设有用于将搂叶聚拢后的白萝卜缨叶夹持拔起并运输的一级夹持输送机构,一级夹持输送机构的下方设有用于夹持输送被一级夹持输送机构输送的白萝卜果实且与一级夹持输送机构进行同步输送的二级夹持输送机构以及用于将白萝卜缨叶和白萝卜果实切割分离的切割机构,所述深松机构、搂叶机构和一级夹持输送机构均以能调节安装高度的方式安装在所述行走底盘上。
4、所述行走底盘设有安装座,所述安装座通过第一高度调节组件以能调节安装高度的方式安装在行走底盘上,所述安装座上安装有地轮。
5、所述第一高度调节组件包括一根以上连杆和调节油缸,所述连杆的一端与机架铰接,所述连杆的另一端与安装座固定连接,所述调节油缸的一端与连杆铰接,所述调节油缸的另一端与机架铰接。
6、所述深松机构包括深松连杆、深松摇杆、深松铲和旋转驱动件,所述深松摇杆铰接安装在安装座上,所述深松铲连接于所述深松摇杆上延伸至深松摇杆的下方,所述深松连杆的一端与深松摇杆铰接,所述深松连杆的另一端通过偏心轴承与所述旋转驱动件相连。
7、所述搂叶机构包括水平搂叶机构和位于水平搂叶机构后方的垂直搂叶机构,所述水平搂叶机构和垂直搂叶机构固定连接在一连接架上;所述水平搂叶机构包括第一链轮组件、第二链轮组件以及绕设在所述第一链轮组件和第二链轮组件上的两个第一环形链条,两个第一环形链条间隔设置形成容纳白萝卜缨叶的空间,各个第一环形链条上设有多个间隔设置的第一搂叶齿,所述第一搂叶齿在第一环形链条所在平面内延伸,所述第一链轮组件和/或第二链轮组件连接有第一旋转驱动件;所述垂直搂叶机构包括两个间隔设置的链轮式搂叶单元,所述链轮式搂叶单元包括第三链轮组件、第四链轮组件以及绕设在所述第三链轮组件和第四链轮组件上的第二环形链条,所述第二环形链条设有多个间隔设置且随第二环形链条运行依次通过两个链轮式搂叶单元之间空间的第二搂叶齿,所述第三链轮组件和/或第四链轮组件上连接有第二旋转驱动件,两个链轮式搂叶单元的第二环形链条在前后方向上具有间距;所述第一链轮组件和第二链轮组件的转动轴线水平布置且垂直于所述白萝卜联合收获机的行进方向,所述第三链轮组件和第四链轮组件的转动轴线垂直于第一链轮组件和第二链轮组件的转动轴线,两个第一环形链条之间空间位于两个链轮式搂叶单元之间空间的正前方。
8、所述连接架通过第二高度调节组件以能调节高度的方式安装在一级夹持输送机构,所述第二高度调节组件包括一根以上搂叶摆杆,所述搂叶摆杆以上下摆动方式铰接安装在一级夹持输送机构上,所述连接架铰接在所述搂叶摆杆上,所述第二高度调节组件还包括用于调节所述连接架高度的高度调节机构,所述高度调节机构包括搂叶调节油缸和搂叶连杆,所述搂叶连杆以上下摆动方式铰接安装在机架上,所述搂叶连杆的摆动端与所述连接架铰接,所述搂叶调节油缸铰接安装在安装座上,所述搂叶调节油缸与搂叶连杆铰接。
9、所述一级夹持输送机构包括两个并排且间隔设置的第一夹持输送单元,所述第一夹持输送单元包括第一皮带轮组件和第二皮带轮组件以及绕设在所述第一皮带轮组件和第二皮带轮组件上的第一环形皮带,所述第一皮带轮组件和/或第二皮带轮组件连接有第三旋转驱动件,两个所述第一夹持输送单元固定连接在一支撑架上,脱离搂叶机构的白萝卜缨叶位于两个第一夹持输送单元形成的入口端之间;所述支撑架后端通过以能上下摆动调节前端高度的方式安装在机架上,所述安装座上安装有用于调节支撑架摆动角度的第三高度调节组件。
10、所述机架上设有可调节高度的安装架,所述支撑架后端铰接在安装架上并能绕铰接轴上下摆动;所述安装架包括固定架和套接在所述固定架上沿所述固定架滑动的滑动架,所述固定架上铰接有第一夹持输送调节油缸,所述第一夹持输送调节油缸与所述滑动架铰接;所述第三高度调节组件设为第二夹持输送调节油缸,所述第二夹持输送调节油缸铰接在安装座,所述第二夹持输送调节油缸与支撑架铰接。
11、所述二级夹持输送机构包括两个并排且间隔布置的第二夹持输送单元,所述第二夹持输送单元包括第三皮带轮组件和第四皮带轮组件以及绕设在所述第三皮带轮组件和第四皮带轮组件上的第二环形皮带,两个所述第二夹持输送单元固定连接在一支架上并通过两组链传动组件与一级夹持输送机构相连;所述切割机构包括安装在二级夹持输送机构后方第三皮带轮组件上的环形切刀。
12、所述切割机构包括位于一级夹持输送机构下方、且位于二级夹持输送机构上方的固定切刀,所述固定切刀通过可调节高度的方式安装在二级夹持输送机构上。
13、与现有技术相比,本发明的优点在于:本发明的白萝卜联合收获机在作业时,先由深松机构对土壤进行深松,破坏白萝卜与土壤之间的黏附力,确保白萝卜被顺利拔起,实现低损收获。搂叶机构对白萝卜缨叶搂起,随着行走底盘往前行进,白萝卜缨叶脱离搂叶机构后就处于一级夹持输送机构的入口端,随即一级夹持输送机构将聚拢的缨叶夹持拔起并运输,运输到同时被二级夹持输送机构夹持白萝卜果实时,切割机构将缨叶切断,实现白萝卜缨叶与白萝卜果实的分离。切缨后的白萝卜果实脱离二级夹持输送机构后在重力作用下被收集,缨叶在脱离一级夹持输送机构后抛送至田间。深松机构、搂叶机构和一级夹持输送机构以能调节安装高度的方式安装在行走底盘上,能够改变深松机构、搂叶机构和一级夹持输送机构到地面的距离,以此满足不同作业场景、公路转运、越障爬坡等需求,提高了场景适用性,增强了实用性。该白萝卜联合收获机是一种集深松、缨叶聚拢、夹持输送、切割为一体的多功能联合作业收获机,具有多功能联合作业、场景适用性较强和实用性较强的优点。
技术特征:
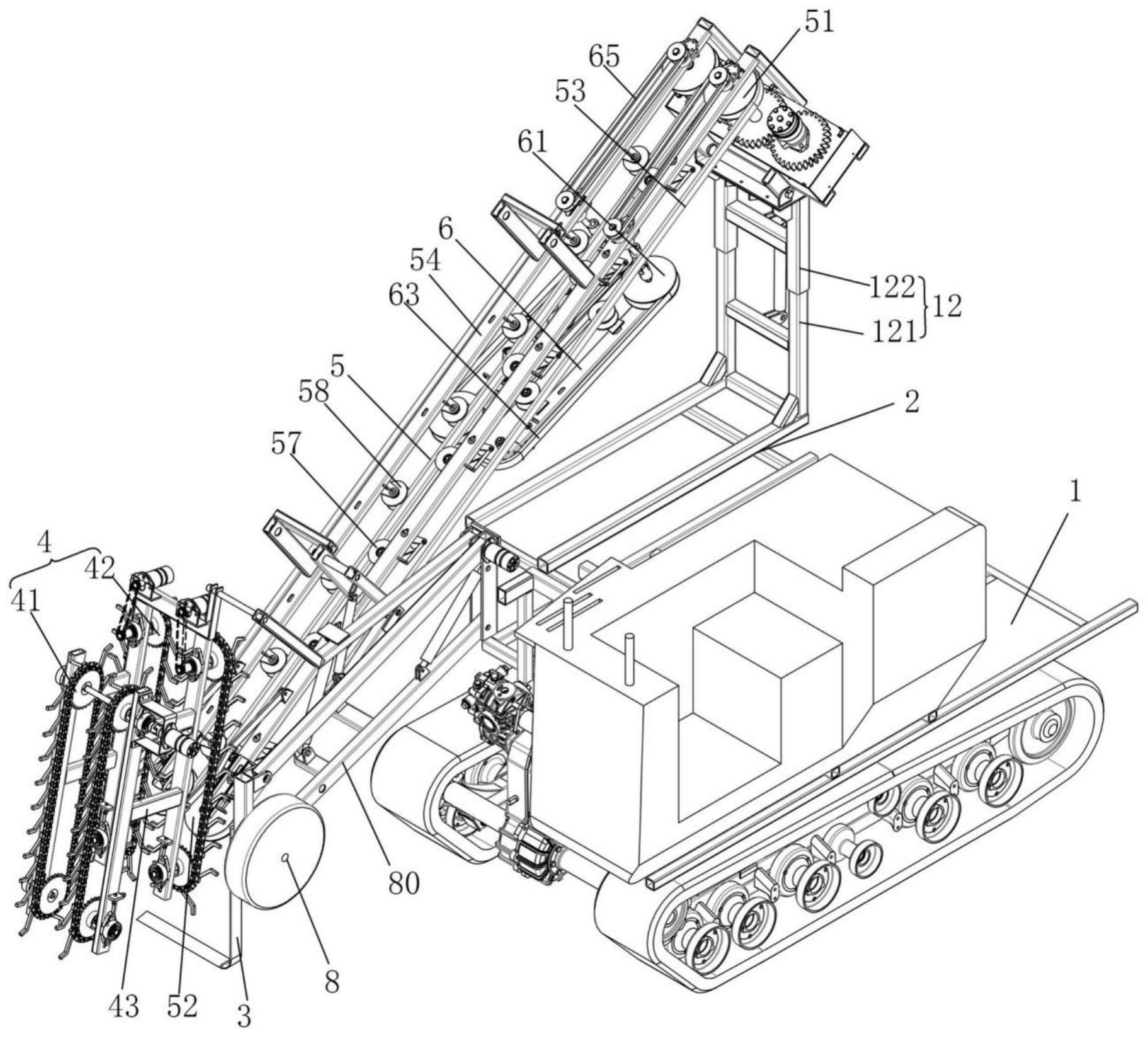
1.一种白萝卜联合收获机,其特征在于:包括行走底盘(1),所述行走底盘(1)上设有机架(2),所述机架(2)的前端安装有用于振动土壤进行松土的深松机构(3)和用于将白萝卜缨叶搂起聚拢的搂叶机构(4),所述搂叶机构(4)的后方设有用于将搂叶聚拢后的白萝卜缨叶夹持拔起并运输的一级夹持输送机构(5),一级夹持输送机构(5)的下方设有用于夹持输送被一级夹持输送机构(5)输送的白萝卜果实且与一级夹持输送机构(5)进行同步输送的二级夹持输送机构(6)以及用于将白萝卜缨叶和白萝卜果实切割分离的切割机构(7),所述深松机构(3)、搂叶机构(4)和一级夹持输送机构(5)均以能调节安装高度的方式安装在所述行走底盘(1)上。
2.根据权利要求1所述的白萝卜联合收获机,其特征在于:所述行走底盘(1)设有安装座(11),所述安装座(11)通过第一高度调节组件以能调节安装高度的方式安装在行走底盘(1)上,所述安装座(11)上安装有地轮(8)。
3.根据权利要求2所述的白萝卜联合收获机,其特征在于:所述第一高度调节组件包括一根以上连杆(80)和调节油缸(81),所述连杆(80)的一端与机架(2)铰接,所述连杆(80)的另一端与安装座(11)固定连接,所述调节油缸(81)的一端与连杆(80)铰接,所述调节油缸(81)的另一端与机架(2)铰接。
4.根据权利要求3所述的白萝卜联合收获机,其特征在于:所述深松机构(3)包括深松连杆(31)、深松摇杆(32)、深松铲(33)和旋转驱动件(34),所述深松摇杆(32)铰接安装在安装座(11)上,所述深松铲(33)连接于所述深松摇杆(32)上延伸至深松摇杆(32)的下方,所述深松连杆(31)的一端与深松摇杆(32)铰接,所述深松连杆(31)的另一端通过偏心轴承与所述旋转驱动件(34)相连。
5.根据权利要求3所述的白萝卜联合收获机,其特征在于:所述搂叶机构(4)包括水平搂叶机构(41)和位于水平搂叶机构(41)后方的垂直搂叶机构(42),所述水平搂叶机构(41)和垂直搂叶机构(42)固定连接在一连接架(43)上;所述水平搂叶机构(41)包括第一链轮组件(411)、第二链轮组件(412)以及绕设在所述第一链轮组件(411)和第二链轮组件(412)上的两个第一环形链条(413),两个第一环形链条(413)间隔设置形成容纳白萝卜缨叶的空间,各个第一环形链条(413)上设有多个间隔设置的第一搂叶齿(414),所述第一搂叶齿(414)在第一环形链条(413)所在平面内延伸,所述第一链轮组件(411)和/或第二链轮组件(412)连接有第一旋转驱动件;所述垂直搂叶机构(42)包括两个间隔设置的链轮式搂叶单元,所述链轮式搂叶单元包括第三链轮组件(421)、第四链轮组件(422)以及绕设在所述第三链轮组件(421)和第四链轮组件(422)上的第二环形链条(423),所述第二环形链条(423)设有多个间隔设置且随第二环形链条(423)运行依次通过两个链轮式搂叶单元之间空间的第二搂叶齿(424),所述第三链轮组件(421)和/或第四链轮组件(422)上连接有第二旋转驱动件,两个链轮式搂叶单元的第二环形链条(423)在前后方向上具有间距;所述第一链轮组件(411)和第二链轮组件(412)的转动轴线水平布置且垂直于所述白萝卜联合收获机的行进方向,所述第三链轮组件(421)和第四链轮组件(422)的转动轴线垂直于第一链轮组件(411)和第二链轮组件(412)的转动轴线,两个第一环形链条(413)之间空间位于两个链轮式搂叶单元之间空间的正前方。
6.根据权利要求5所述的白萝卜联合收获机,其特征在于:所述连接架(43)通过第二高度调节组件以能调节高度的方式安装在一级夹持输送机构(5),所述第二高度调节组件包括一根以上搂叶摆杆(45),所述搂叶摆杆(45)以上下摆动方式铰接安装在一级夹持输送机构(5)上,所述连接架(43)铰接在所述搂叶摆杆(45)上,所述第二高度调节组件还包括用于调节所述连接架(43)高度的高度调节机构,所述高度调节机构包括搂叶调节油缸(44)和搂叶连杆(46),所述搂叶连杆(46)以上下摆动方式铰接安装在机架(2)上,所述搂叶连杆(46)的摆动端与所述连接架(43)铰接,所述搂叶调节油缸(44)铰接安装在安装座(11)上,所述搂叶调节油缸(44)与搂叶连杆(46)铰接。
7.根据权利要求3所述的白萝卜联合收获机,其特征在于:所述一级夹持输送机构(5)包括两个并排且间隔设置的第一夹持输送单元,所述第一夹持输送单元包括第一皮带轮组件(51)和第二皮带轮组件(52)以及绕设在所述第一皮带轮组件(51)和第二皮带轮组件(52)上的第一环形皮带(53),所述第一皮带轮组件(51)和/或第二皮带轮组件(52)连接有第三旋转驱动件,两个所述第一夹持输送单元固定连接在一支撑架(54)上,脱离搂叶机构(4)的白萝卜缨叶位于两个第一夹持输送单元形成的入口端之间;所述支撑架(54)后端通过以能上下摆动调节前端高度的方式安装在机架(2)上,所述安装座(11)上安装有用于调节支撑架(54)摆动角度的第三高度调节组件。
8.根据权利要求7所述的白萝卜联合收获机,其特征在于:所述机架(2)上设有可调节高度的安装架(12),所述支撑架(54)后端铰接在安装架(12)上并能绕铰接轴上下摆动;所述安装架(12)包括固定架(121)和套接在所述固定架(121)上沿所述固定架(121)滑动的滑动架(122),所述固定架(121)上铰接有第一夹持输送调节油缸(55),所述第一夹持输送调节油缸(55)与所述滑动架(122)铰接;所述第三高度调节组件设为第二夹持输送调节油缸(56),所述第二夹持输送调节油缸(56)铰接在安装座(11),所述第二夹持输送调节油缸(56)与支撑架(54)铰接。
9.根据权利要求1所述的白萝卜联合收获机,其特征在于:所述二级夹持输送机构(6)包括两个并排且间隔布置的第二夹持输送单元,所述第二夹持输送单元包括第三皮带轮组件(61)和第四皮带轮组件(62)以及绕设在所述第三皮带轮组件(61)和第四皮带轮组件(62)上的第二环形皮带(63),两个所述第二夹持输送单元固定连接在一支架(64)上并通过两组链传动组件(65)与一级夹持输送机构(5)相连;所述切割机构(7)包括安装在二级夹持输送机构(6)后方第三皮带轮组件(61)上的环形切刀(71)。
10.根据权利要求1至8任一项所述的白萝卜联合收获机,其特征在于:所述切割机构(7)包括位于一级夹持输送机构(5)下方、且位于二级夹持输送机构(6)上方的固定切刀(72),所述固定切刀(72)通过可调节高度的方式安装在二级夹持输送机构(6)上。
技术总结
一种白萝卜联合收获机,包括行走底盘,行走底盘上设有机架,机架的前端安装有深松机构和用于将白萝卜缨叶搂起聚拢的搂叶机构,搂叶机构的后方设有用于将搂叶聚拢后的白萝卜缨叶夹持拔起并运输的一级夹持输送机构,一级夹持输送机构的下方设有用于夹持输送被一级夹持输送机构输送的白萝卜果实且与一级夹持输送机构进行同步输送的二级夹持输送机构以及用于将白萝卜缨叶和白萝卜果实切割分离的切割机构,深松机构、搂叶机构和一级夹持输送机构均以能调节安装高度的方式安装在行走底盘上。该白萝卜联合收获机是一种集深松、缨叶聚拢、夹持输送、切割为一体的多功能联合作业收获机,具有多功能联合作业、场景适用性较强和实用性较强的优点。
技术研发人员:刘大为,肖霄,谢方平,王修善,赵周桥
受保护的技术使用者:湖南农业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!