一种新型安全性高的园林粗枝锯木装置的制作方法
1.本实用新型涉及一种园林建设设备技术领域,具体是一种新型安全性高的园林粗枝锯木装置。
背景技术:
2.园林绿化工程是建设风景园林绿地的工程,园林绿化是为人们提供一个良好的休息、文化娱乐、亲近大自然、满足人们回归自然愿望的场所,是保护生态环境、改善城市生活环境的重要措施,园林绿化泛指园林城市绿地和风景名胜区中涵盖园林建筑工程在内的环境建设工程,树木在生长过程中,部分支杆会因形象怪异,阻挡道路,或者病情需要修剪锯掉。
3.现有技术中,剪枝钳能够修剪较细的支杆,当遇到粗支杆时,相当费力,粗支杆目前只能通过手动锯子和电锯进行修剪,手动锯子费力,电锯虽然省力,但电锯操作十分危险,尤其是锯断树木后电锯的重力瞬间恢复,经常会向下缓冲一端距离才会在臂力的作用下停止,容易受伤,在树上作业时十分危险,故而提出一种新型安全性高的园林粗枝锯木装置解决上述所提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种新型安全性高的园林粗枝锯木装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种新型安全性高的园林粗枝锯木装置,包括机壳,所述机壳的内部开设有穿孔,所述机壳的内部固定安装有驱动机构,所述机壳的右侧固定安装有导板,所述导板的外侧安装有与驱动机构传动连接的链条,所述机壳的内部开设有安装槽,所述安装槽的内部通过动力机构连接有下颚。
7.作为本实用新型再进一步的方案:所述机壳的顶部安装有第一按钮开关,所述第一按钮开关与驱动机构电连接。
8.作为本实用新型再进一步的方案:所述下颚的内部呈空心状,包裹在导板底部的链条外侧,所述下颚的内部固定安装有加强筋,所述下颚的右端设置有向上弯曲的限位齿,所述导板的顶部设置有咬齿。
9.作为本实用新型再进一步的方案:所述动力机构由转轴、杠杆臂、万向座和电动推杆,所述转轴通过轴承与机壳的两侧可转动连接,所述转轴的外侧固定安装有位于安装槽内侧的杠杆臂,所述杠杆臂的右端与下颚固定连接,所述杠杆臂远离下颚的一端通过万向座安装有电动推杆。
10.作为本实用新型再进一步的方案:所述电动推杆的顶部通过万向座与机壳连接。
11.作为本实用新型再进一步的方案:所述机壳的顶部安装有第二按钮开关,所述第二按钮开关与电动推杆电连接。
12.作为本实用新型再进一步的方案:所述杠杆臂在安装槽的内部,且杠杆臂的侧壁与安装槽的侧壁之间设置有间隙。
13.与现有技术相比,本实用新型的有益效果是:
14.该新型安全性高的园林粗枝锯木装置,通过第一按钮开关和第二按钮开关控制驱动机构和动力机构的运作,驱动机构负责驱动链条锯木,动力机构负责驱动下颚向上咬合,以咬合力提高锯木效率,驱动机构与动力机构配合下,锯木完成时下颚也将完全包裹导板,形成防护屏障,起到安全保护的作用。
附图说明
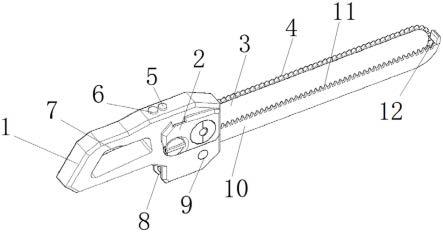
15.图1为一种新型安全性高的园林粗枝锯木装置的结构示意图;
16.图2为一种新型安全性高的园林粗枝锯木装置中动力机构的结构示意图;
17.图3为一种新型安全性高的园林粗枝锯木装置的初始状态示意图。
18.图中:1、机壳;2、驱动机构;3、导板;4、链条;5、第一按钮开关;6、第二按钮开关;7、穿孔;8、安装槽;9、转轴;10、下颚;11、咬齿;12、限位齿;13、加强筋;14、杠杆臂;15、万向座;16、电动推杆。
具体实施方式
19.请参阅图1~3,本实用新型实施例中,一种新型安全性高的园林粗枝锯木装置,包括机壳1,所述机壳1的内部开设有穿孔7,所述机壳1的内部固定安装有驱动机构2,所述机壳1的右侧固定安装有导板3,所述导板3的外侧安装有与驱动机构2传动连接的链条4,所述机壳1的内部开设有安装槽8,所述安装槽8的内部通过动力机构连接有下颚10,穿孔7将机壳1的顶部形成一个环形,使用者可单手握持设备,设备总长度为六十厘米,机壳1长度二十厘米,导板3长度四十厘米,电源为锂电池背包,机壳1通过电线与锂电池背包连接。
20.在一个优选的实施方式中,所述机壳1的顶部安装有第一按钮开关5,所述第一按钮开关5与驱动机构2电连接,使用者可通过手动操作第一按钮开关5从而控制驱动机构2的工作。
21.在一个优选的实施方式中,所述下颚10的内部呈空心状,包裹在导板3底部的链条4外侧,所述下颚10的内部固定安装有加强筋13,所述下颚10的右端设置有向上弯曲的限位齿12,所述导板3的顶部设置有咬齿11,咬齿11能够抓住树皮,提高摩擦力,防止滑脱。
22.在一个优选的实施方式中,所述动力机构由转轴9、杠杆臂14、万向座15和电动推杆16,所述转轴9通过轴承与机壳1的两侧可转动连接,所述转轴9的外侧固定安装有位于安装槽8内侧的杠杆臂14,所述杠杆臂14的右端与下颚10固定连接,所述杠杆臂14远离下颚10的一端通过万向座15安装有电动推杆16,当电动推杆16伸长时,可推动杠杆臂14的左端向下移动,杠杆臂14的右端则会向上移动,带动下颚10向上移动,套在导板3的外侧。
23.在一个优选的实施方式中,所述电动推杆16的顶部通过万向座15与机壳1连接,万向座15又称万向节即万向接头,是实现变角度动力传递的机件,用于需要改变传动轴线方向的位置,它是汽车驱动系统的万向传动装置的“关节”部件。
24.在一个优选的实施方式中,所述机壳1的顶部安装有第二按钮开关6,所述第二按钮开关6与电动推杆16电连接,可通过第二按钮开关6控制电动推杆16的升缩。
25.在一个优选的实施方式中,所述杠杆臂14在安装槽8的内部,且杠杆臂14的侧壁与安装槽8的侧壁之间设置有间隙。
26.本实用新型的工作原理是:初始状态下,电动推杆16处于收缩状态,电动推杆16带动杠杆臂14左端向上移动,从而杠杆臂14的右端向下移动,使下颚10与导板3呈开口状,探至支杆外侧,通过第二按钮开关6使电动推杆16伸长,下颚10与导板3闭合咬住支杆,通过第一按钮开关5使驱动机构2带动链条4传动锯木,随着锯木的深度,下颚10与导板3逐渐咬合,直到将支杆锯断,同时,下颚10与导板3完全咬合,此时下颚10将导板3底部包裹住,可有效的防止链条4与身体接触造成伤害,同时,锂电池背包的供电方式,能够有效的减少设备重量,操作更加灵活轻便,并且锯木时仅靠咬合力施加压力即可,高效快速。
27.需要说明的是,以上各实施例均属于同一实用新型构思,各实施例的描述各有侧重,在个别实施例中描述未详尽之处,可参考其他实施例中的描述。
28.以上所述实施例仅表达了本实用新型的实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
技术特征:
1.一种新型安全性高的园林粗枝锯木装置,其特征在于,包括机壳(1),所述机壳(1)的内部开设有穿孔(7),所述机壳(1)的内部固定安装有驱动机构(2),所述机壳(1)的右侧固定安装有导板(3),所述导板(3)的外侧安装有与驱动机构(2)传动连接的链条(4),所述机壳(1)的内部开设有安装槽(8),所述安装槽(8)的内部通过动力机构连接有下颚(10)。2.根据权利要求1所述的一种新型安全性高的园林粗枝锯木装置,其特征在于,所述机壳(1)的顶部安装有第一按钮开关(5),所述第一按钮开关(5)与驱动机构(2)电连接。3.根据权利要求1所述的一种新型安全性高的园林粗枝锯木装置,其特征在于,所述下颚(10)的内部呈空心状,包裹在导板(3)底部的链条(4)外侧,所述下颚(10)的内部固定安装有加强筋(13),所述下颚(10)的右端设置有向上弯曲的限位齿(12),所述导板(3)的顶部设置有咬齿(11)。4.根据权利要求1所述的一种新型安全性高的园林粗枝锯木装置,其特征在于,所述动力机构由转轴(9)、杠杆臂(14)、万向座(15)和电动推杆(16),所述转轴(9)通过轴承与机壳(1)的两侧可转动连接,所述转轴(9)的外侧固定安装有位于安装槽(8)内侧的杠杆臂(14),所述杠杆臂(14)的右端与下颚(10)固定连接,所述杠杆臂(14)远离下颚(10)的一端通过万向座(15)安装有电动推杆(16)。5.根据权利要求4所述的一种新型安全性高的园林粗枝锯木装置,其特征在于,所述电动推杆(16)的顶部通过万向座(15)与机壳(1)连接。6.根据权利要求4所述的一种新型安全性高的园林粗枝锯木装置,其特征在于,所述机壳(1)的顶部安装有第二按钮开关(6),所述第二按钮开关(6)与电动推杆(16)电连接。7.根据权利要求4所述的一种新型安全性高的园林粗枝锯木装置,其特征在于,所述杠杆臂(14)在安装槽(8)的内部,且杠杆臂(14)的侧壁与安装槽(8)的侧壁之间设置有间隙。
技术总结
本实用新型公开了一种新型安全性高的园林粗枝锯木装置,包括机壳,所述机壳的内部开设有穿孔,所述机壳的内部固定安装有驱动机构,所述机壳的右侧固定安装有导板,所述导板的外侧安装有与驱动机构传动连接的链条,所述机壳的内部开设有安装槽,所述安装槽的内部通过动力机构连接有下颚,所述机壳的顶部安装有第一按钮开关,所述第一按钮开关与驱动机构电连接。该新型安全性高的园林粗枝锯木装置,具有安全性高的优点,解决了电锯操作危险,尤其是锯断树木后电锯的重力瞬间恢复,经常会向下缓冲一端距离才会在臂力的作用下停止,容易受伤,在树上作业时更加危险的问题。在树上作业时更加危险的问题。在树上作业时更加危险的问题。
技术研发人员:马俊 马磊 刘婷婷 马宝 丁凯
受保护的技术使用者:宁夏荣林园林绿化工程有限公司
技术研发日:2022.03.18
技术公布日:2022/7/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1