一种猪圈用清洁机器人的制作方法
1.本实用新型涉及生猪养殖的技术领域,特别涉及一种猪圈用清洁机器人。
背景技术:
2.生猪养殖过程中,猪舍需要定期的进行清洁,现有的清洁方式主要是工人手持水管直接在猪舍外对猪舍进行冲洗,但是这种清洁方式不能够将强力粘黏于地面上的污垢冲洗掉,因此需要人工定点进行清洁,这种清洁方式不仅效率低、耗费劳动力大,而且不能够有效的清洁干净,因此本申请设置了一种猪圈用清洁机器人。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种猪圈用清洁机器人,以解决背景技术中描述的现有技术中猪舍清洁效率低、洁净度低的问题。
4.为解决上述问题,本实用新型提供以下的技术方案:一种猪圈用清洁机器人,包括
5.若干电驱动轮,分别通过支撑腿连接于横梁板的下表面;
6.控制箱,设置于横梁板的上表面,该控制箱上具有可拆卸的盖板;
7.电控箱,设置于控制箱内;
8.转动板,可转动的设置于横梁板的下表面;
9.升降板,可升降的设置于转动板上;
10.若干刷板,可转动的设置于升降板的下表面,该刷板的下表面设置有刷毛;
11.集水盒,为圆环形,并套设于升降板的外壁;
12.若干喷管,均匀的设置于集水盒上;
13.接头管,贯穿该横梁板并与横梁板固定连接,该接头管通过连管与集水盒连通。
14.优选的:该横梁板上设置有转动贯穿该横梁板的转动柱,该转动柱上套设有齿环,该横梁板上设置有伺服电机,该伺服电机的输出端设置有与齿环啮合的齿轮。
15.优选的:该转动板上设置有若干升降气缸,该升降气缸的输出端连接有连杆,该连杆与升降板连接。
16.优选的:该升降板上还设置有齿轮箱,该齿轮箱的外壁设置有驱动齿轮箱的驱动电机,该齿轮箱的输出端与刷板的转轴连接。
17.优选的:该电控箱内设置有工控机和无线信号收发器、控制面板,该工控机分别与无线信号收发器、控制面板、电驱动轮、驱动电机、升降气缸、伺服电机电性连接。
18.采用以上技术方案的有益效果是:
19.本申请通过设置的电驱动轮带动横梁板移动,通过转动板的转动带动升降板转动,并且升降板的竖向移动能够带动刷板竖向移动,通过刷板能够使得刷毛与地面接触,实现对地面的清洁,其中接头管通过连管与集水盒连通,使得喷管能够喷出清水对地面冲洗,从而实现不需要人工介入的清洁。
附图说明
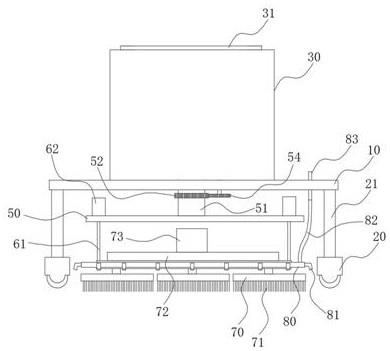
20.图1是本实用新型一种猪圈用清洁机器人的主视图。
21.图2是本实用新型一种猪圈用清洁机器人的结构示意图。
22.其中:横梁板10、电驱动轮20、支撑腿21、控制箱30、盖板31、电控箱40、转动板50、转动柱51、齿环52、伺服电机53、齿轮54、升降板60、连杆61、升降气缸62、刷板70、刷毛71、齿轮箱72、驱动电机73、集水盒80、喷管81、连管82、接头管83。
具体实施方式
23.下面结合附图详细说明本实用新型的实施方式。
24.如图1-2,在本实施例一中,一种猪圈用清洁机器人,包括
25.若干电驱动轮20,分别通过支撑腿21连接于横梁板10的下表面;
26.控制箱30,设置于横梁板10的上表面,该控制箱30上具有可拆卸的盖板31;
27.电控箱40,设置于控制箱30内;
28.转动板50,可转动的设置于横梁板10的下表面;
29.升降板80,可升降的设置于转动板50上;
30.若干刷板70,可转动的设置于升降板80的下表面,该刷板70的下表面设置有刷毛71;
31.集水盒80,为圆环形,并套设于升降板80的外壁;
32.若干喷管81,均匀的设置于集水盒80上;
33.接头管83,贯穿该横梁板10并与横梁板10固定连接,该接头管83通过连管82与集水盒80连通。
34.本实施例是这样实施的:
35.本申请通过遥控器能够控制电控箱的电路系统;
36.本申请在使用时,将接头管83外接猪舍房顶上的水管,从而向集水盒80内注水,通过喷管81能够将水喷在猪舍内,通过电驱动轮20使得横梁板10移动,通过转动板50的转动能够带动升降板80转动,升降板80的竖向移动能够带动刷板70竖向移动,使得刷板70与地面接触,然后刷板70的转动能够使得刷毛71配合喷管81喷出的清水刷洗地面。
37.实施例二
38.作为实施例一的优化方案,该横梁板10上设置有转动贯穿该横梁板10的转动柱51,该转动柱51上套设有齿环52,该横梁板10上设置有伺服电机53,该伺服电机53的输出端设置有与齿环52啮合的齿轮54。
39.本实施例是这样实施的,通过设置的伺服电机53带动齿轮54转动,齿轮54带动齿环52转动,齿环52带动转动柱51转动,转动柱51带动转动板50转动。
40.实施例三
41.作为实施例一的优化方案,该转动板50上设置有若干升降气缸62,该升降气缸62的输出端连接有连杆61,该连杆61与升降板60连接。
42.本实施例是这样实施的,通过设置的升降气缸62带动连杆61竖向移动,连杆61带动升降板60竖向移动。
43.实施例四
44.作为实施例一的优化方案,该升降板60上还设置有齿轮箱72,该齿轮箱72的外壁设置有驱动齿轮箱72的驱动电机73,该齿轮箱72的输出端与刷板70的转轴连接。
45.本实施例是这样实施的,通过设置的驱动电机73配合齿轮箱72带动刷板70转动。
46.实施例五
47.作为上述实施例的优化方案,该电控箱40内设置有工控机和无线信号收发器、控制面板,该工控机分别与无线信号收发器、控制面板、电驱动轮20、驱动电机73、升降气缸62、伺服电机53电性连接。
48.本实施例是这样实施的,通过工控机实现智能化的控制,并且通过无线信号收发器能够与外接的遥控器配合使用。
49.以上该的仅是本实用新型的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
技术特征:
1.一种猪圈用清洁机器人,其特征在于:包括若干电驱动轮,分别通过支撑腿连接于横梁板的下表面;控制箱,设置于横梁板的上表面,该控制箱上具有可拆卸的盖板;电控箱,设置于控制箱内;转动板,可转动的设置于横梁板的下表面;升降板,可升降的设置于转动板上;若干刷板,可转动的设置于升降板的下表面,该刷板的下表面设置有刷毛;集水盒,为圆环形,并套设于升降板的外壁;若干喷管,均匀的设置于集水盒上;接头管,贯穿该横梁板并与横梁板固定连接,该接头管通过连管与集水盒连通。2.根据权利要求1所述的一种猪圈用清洁机器人,其特征在于,该横梁板上设置有转动贯穿该横梁板的转动柱,该转动柱上套设有齿环,该横梁板上设置有伺服电机,该伺服电机的输出端设置有与齿环啮合的齿轮。3.根据权利要求1所述的一种猪圈用清洁机器人,其特征在于,该转动板上设置有若干升降气缸,该升降气缸的输出端连接有连杆,该连杆与升降板连接。4.根据权利要求1所述的一种猪圈用清洁机器人,其特征在于,该升降板上还设置有齿轮箱,该齿轮箱的外壁设置有驱动齿轮箱的驱动电机,该齿轮箱的输出端与刷板的转轴连接。5.根据权利要求1-4中任意一项所述的一种猪圈用清洁机器人,其特征在于,该电控箱内设置有工控机和无线信号收发器、控制面板,该工控机分别与无线信号收发器、控制面板、电驱动轮、驱动电机、升降气缸、伺服电机电性连接。
技术总结
本实用新型公开了一种猪圈用清洁机器人,涉及生猪养殖的技术领域,包括若干电驱动轮,分别通过支撑腿连接于横梁板的下表面;控制箱,设置于横梁板的上表面,该控制箱上具有可拆卸的盖板;电控箱,设置于控制箱内;转动板,可转动的设置于横梁板的下表面;升降板,可升降的设置于转动板上;若干刷板,可转动的设置于升降板的下表面,该刷板的下表面设置有刷毛;集水盒,为圆环形,并套设于升降板的外壁;若干喷管,均匀的设置于集水盒上;接头管,贯穿该横梁板并与横梁板固定连接,该接头管通过连管与集水盒连通;本申请具有使用方便、清洁效果好、降低工人劳动强度、提高清洁效率等优点。提高清洁效率等优点。提高清洁效率等优点。
技术研发人员:蔡家传
受保护的技术使用者:安徽新农乐园牧业有限公司
技术研发日:2022.06.02
技术公布日:2023/3/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1