一种智能灌溉车的制作方法
本技术涉及农林种植设备,具体指一种智能灌溉车。
背景技术:
1、在农业种植领域中,滴灌、喷灌技术已经得到广泛的应用,滴灌、喷灌技术通常应用在种植大棚内,是一种基于管道网络铺设,可以对作物种植区域进行定时定量灌溉的技术,可有效节约用水和减少人工管理成本。但是这种网络化管道的建设以及大棚等固定设施的投入,整体成本还是很高。对中小型的普通种植户而言,过高的成本意味着种植风险的增长。
2、而在目前的林业种植领域,果树等经济作物的种植基本上还是靠天吃饭,由于林业用地的地势环境复杂、种植区域大,种植还停留在人工修剪、除虫除害的管理方式,规模化程度一般产量也不稳定,种植户难以对经济作物进行精细化管理,且管理成本也居高不下。在林业种植领域中,管道铺设成本更加高,从而使得滴灌、喷灌等各种技术难以应用推广,种植效率难以提升。
3、因此,现有技术还有待于改进和发展。
技术实现思路
1、本实用新型的目的在于针对现有技术的缺陷和不足,提供一种结构合理、满足农业林种植使用、减少人工投入的智能灌溉车。
2、为了实现上述目的,本实用新型采用以下技术方案:
3、本实用新型所述的一种智能灌溉车,包括车架,所述车架的底部设有行走组件,车架上设有控制台和灌溉组件,车架的四周设有若干探测器,控制台分别连接行走组件和探测器;还包括若干路基传感器,所述若干路基传感器布置在道路周边以及经济作物附近,控制台内置有无线定位模块和导航模块,导航模块通过无线定位模块连接gps定位网络。
4、根据以上方案,所述探测器包括视觉探测组件和遥感探测组件,车架的四周设有若干视觉探测组件,视觉探测组件通过线路连接控制台;所述控制台内置有遥感探测组件,遥感探测组件可感知一定范围内的路基传感器。
5、根据以上方案,所述行走组件包括驱动器和行走轮,车架的底部设有若干行走轮,驱动器设于车架后部,且驱动器通过传动机构连接车架后部的行走轮;所述控制台过转向机构连接车架前部的行走轮。
6、根据以上方案,所述控制台上设有驾驶组件,驾驶组件通过转向机构连接车架前部的行走轮。
7、根据以上方案,所述灌溉组件包括蓄水仓、潜水泵和水枪,蓄水仓固定设置在车架上,蓄水仓内设有潜水泵,所述水枪可转动地设置在蓄水仓的上部,且水枪通过水管连接潜水泵。
8、根据以上方案,所述车架上设有传感器充能替换组件,传感器充能替换组件包括充电仓和机械手,充电仓固定设置在车架上,机械手设于充电仓的一侧并与车架配合连接,充电仓上设有若干可容纳路基传感器的充电插槽。
9、根据以上方案,所述充电仓上设有读写设备,路基传感器上设有识别标识,读写设备通过线路连接控制台。
10、本实用新型有益效果为:本实用新型结构合理,灌溉车配置有充能替换组件,可对路基传感器进行读写操作和替换,无需人工干预;路基传感器结合云端gps定位网络,可自行寻路或根据规划路径进行灌溉作业,减少人工投入提升种植作业效率。
技术特征:
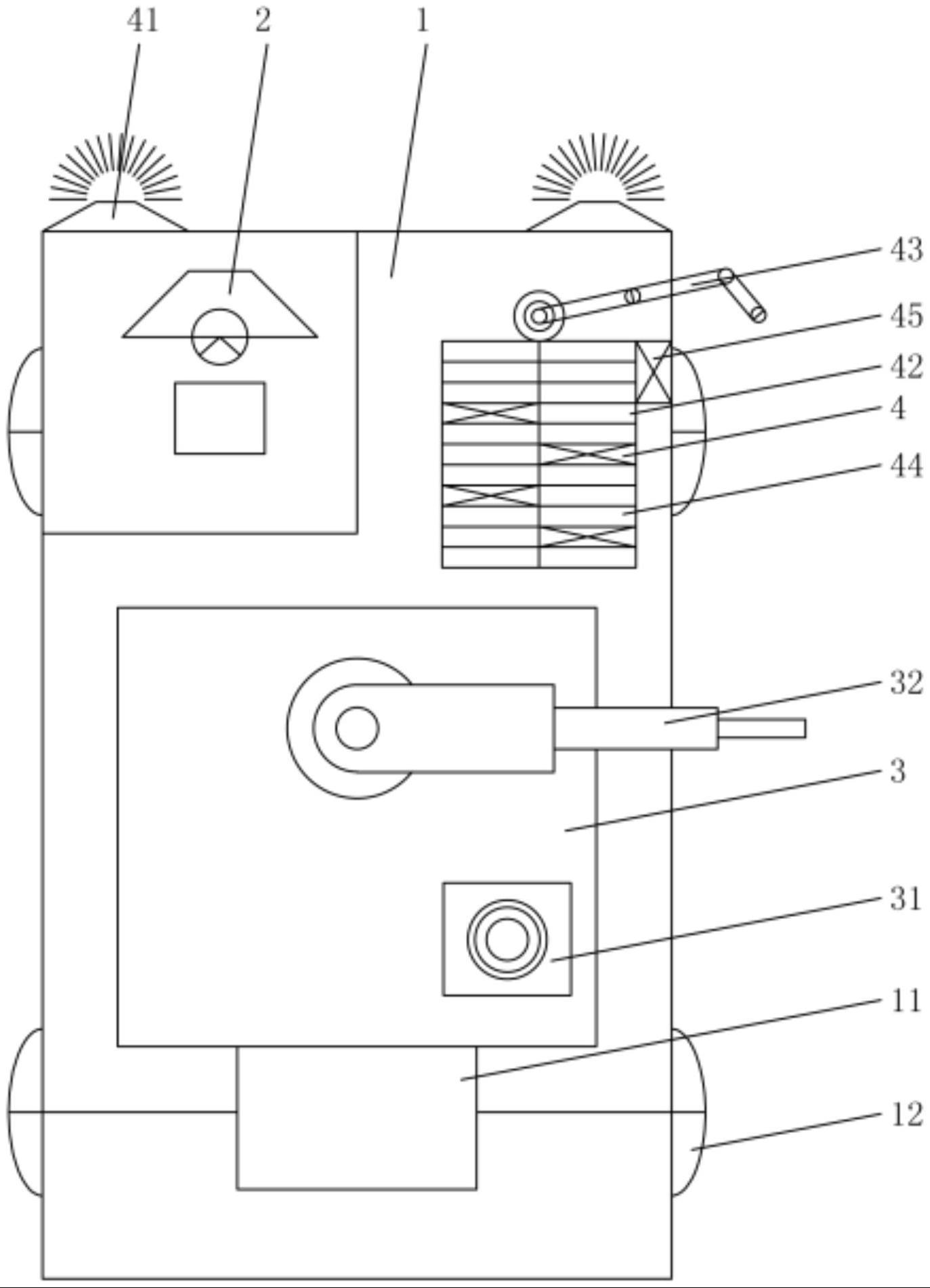
1.一种智能灌溉车,包括车架(1),其特征在于:所述车架(1)的底部设有行走组件,车架(1)上设有控制台(2)和灌溉组件,车架(1)的四周设有若干探测器,控制台(2)分别连接行走组件和探测器;还包括若干路基传感器(4),所述若干路基传感器(4)布置在道路周边以及经济作物附近,控制台(2)内置有无线定位模块和导航模块,导航模块通过无线定位模块连接gps定位网络。
2.根据权利要求1所述的智能灌溉车,其特征在于:所述探测器包括视觉探测组件(41)和遥感探测组件,车架(1)的四周设有若干视觉探测组件(41),视觉探测组件(41)通过线路连接控制台(2);所述控制台(2)内置有遥感探测组件,遥感探测组件可感知一定范围内的路基传感器(4)。
3.根据权利要求2所述的智能灌溉车,其特征在于:所述行走组件包括驱动器(11)和行走轮(12),车架(1)的底部设有若干行走轮(12),驱动器(11)设于车架(1)后部,且驱动器(11)通过传动机构连接车架(1)后部的行走轮(12);所述控制台(2)过转向机构连接车架(1)前部的行走轮(12)。
4.根据权利要求3所述的智能灌溉车,其特征在于:所述控制台(2)上设有驾驶组件(13),驾驶组件(13)通过转向机构连接车架(1)前部的行走轮(12)。
5.根据权利要求1所述的智能灌溉车,其特征在于:所述灌溉组件包括蓄水仓(3)、潜水泵(31)和水枪(32),蓄水仓(3)固定设置在车架(1)上,蓄水仓(3)内设有潜水泵(31),所述水枪(32)可转动地设置在蓄水仓(3)的上部,且水枪(32)通过水管连接潜水泵(31)。
6.根据权利要求1所述的智能灌溉车,其特征在于:所述车架(1)上设有传感器充能替换组件,传感器充能替换组件包括充电仓(42)和机械手(43),充电仓(42)固定设置在车架(1)上,机械手(43)设于充电仓(42)的一侧并与车架(1)配合连接,充电仓(42)上设有若干可容纳路基传感器(4)的充电插槽(44)。
7.根据权利要求6所述的智能灌溉车,其特征在于:所述充电仓(42)上设有读写设备(45),路基传感器(4)上设有识别标识,读写设备(45)通过线路连接控制台(2)。
技术总结
本技术涉及农林种植设备技术领域,具体指一种智能灌溉车;包括车架,所述车架的底部设有行走组件,车架上设有控制台和灌溉组件,车架的四周设有若干探测器,控制台分别连接行走组件和探测器;还包括若干路基传感器,所述若干路基传感器布置在道路周边以及经济作物附近,控制台内置有无线定位模块和导航模块,导航模块通过无线定位模块连接GPS定位网络;本技术结构合理,灌溉车配置有充能替换组件,可对路基传感器进行读写操作和替换,无需人工干预;路基传感器结合云端GPS定位网络,可自行寻路或根据规划路径进行灌溉作业,减少人工投入提升种植作业效率。
技术研发人员:唐丹霞
受保护的技术使用者:唐丹霞
技术研发日:20220627
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!