一种用于果实的无损采摘装置
本技术涉及果实无损采摘,具体涉及一种用于果实的无损采摘装置。
背景技术:
1、果实采摘末端执行器是农业采摘机器人的关键部件,由于其直接对果实进行抓取采摘,对果实采摘质量的优劣有着直接的影响。由于各种果实自身的物理特性差异较大,通用的采摘末端执行器不多。如猕猴桃、桃子等果皮较薄的果实采摘周期较短,劳动强度大,且其标准规模化的种植有利于实现自动化采摘。现阶段所出现的果实采摘装置的采摘速度慢,采摘角度固定,所以有必要设计发明一种结构形式简单,能够快速自动采摘的果实采摘装置。
技术实现思路
1、针对现有技术中的缺陷,本实用新型提供一种用于果实的无损采摘装置,以解决上述技术问题。
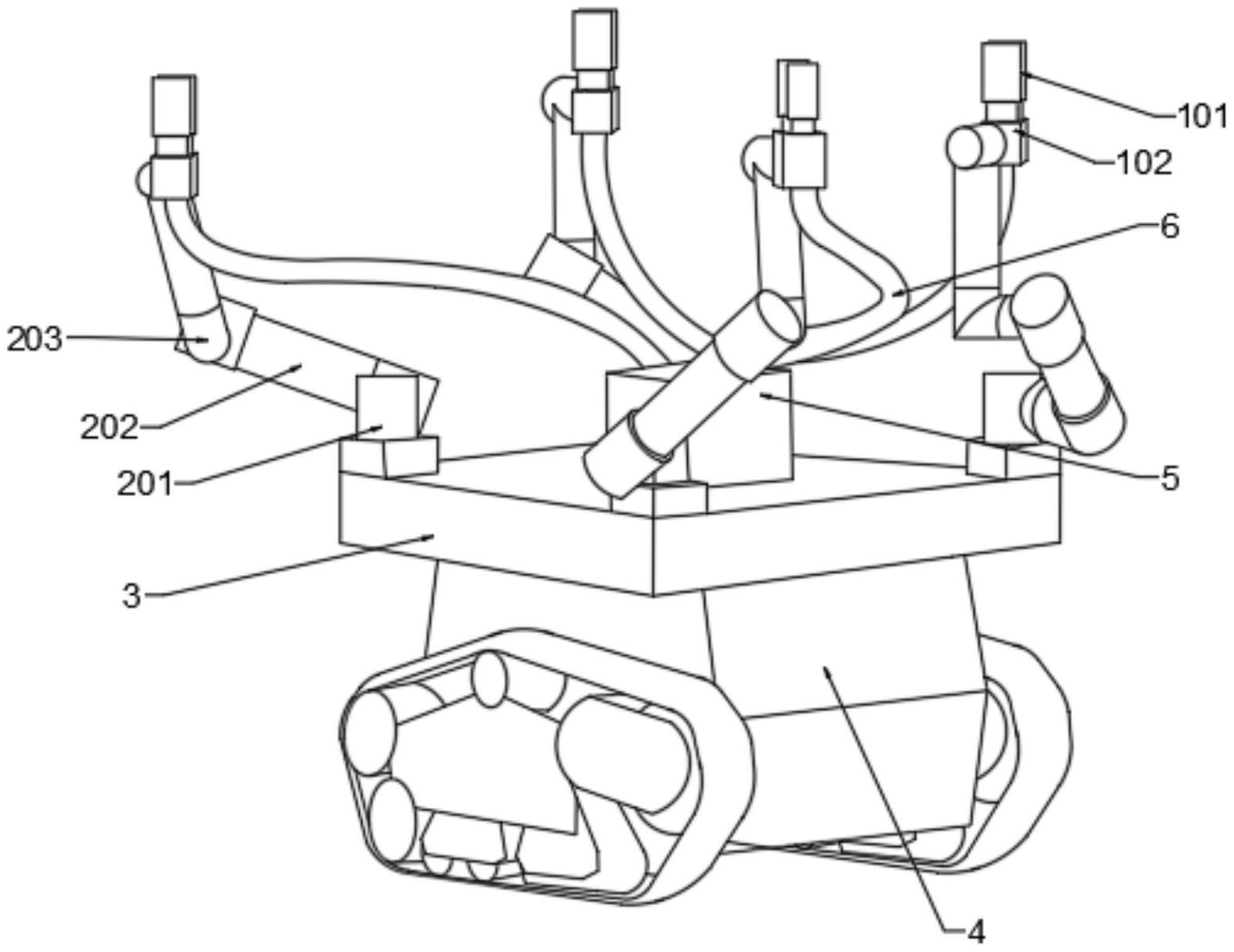
2、一种用于果实的无损采摘装置,包括采摘执行器、机械手、行进机构、连接架,所述行进机构的顶部设有连接架,所述连接架的顶部设有机械手,所述机械手远离所述连接架的一端设有采摘执行器,所述采摘执行器包括有末端电机、仿生手指,所述末端电机用于控制所述仿生手指动作采摘果实,所述机械手为直角坐标型机械手。
3、作为优选地,所述机械手包括底座、机械臂、转动机构,所述机械臂通过所述转动机构与所述底座转动连接。
4、作为优选地,所述机械手可安设若干个机械臂,所述机械臂与机械臂之间均通过所述转动机构连接,所述至少一个机械臂与所述底座连接。
5、作为优选地,所述连接架包括支架、电动升降台,所述行进机构顶部与所述支架连接,所述支架顶部设有升降台,所述机械手安设于所述电动升降台顶部。
6、作为优选地,所述仿生手指包括前手指、后手指,所述前手指为仿生弧形面,采用硅胶或者海绵做内衬,所述的后手指为仿生弧形面,采用硅胶或者海绵做内衬。所述末端电机用于控制所述后手指转动,使所述后手指顶部夹持果实,所述后手指底部为空挡位置,果实依靠重力从空挡位置掉落。
7、作为优选地,还包括波纹管、果实筐,所述果实筐安设于所述连接架顶部,所述波纹管的一端与所述果实框贯通,所述波纹管的另一端与所述后手指的空档位置连接。
8、作为优选地,还包括控制模块,所述控制模块与所述行进机构、末端电机、转动机构、电动升降台均电性连接。
9、作为优选地,还包括压力传感器、测距传感器、变频控制器、速度传感器,所述压力传感器安设在所述后手指与果实的接触面上,所述行进机构的四周安设有若干测距传感器,所述行进机构上还安设有速度传感器,所述行进机构、变频控制器、控制模块依次电性连接,所述压力传感器、测距传感器、速度传感器均与所述控制模块电性连接。
10、本实用新型的有益效果体现在:
11、本实用新型通过设有直角坐标型机械手,能够控制采摘执行器对不同方位、不同角度的果实进行采摘,还设置有带电动升降台的连接架,进一步拓展了装置的采摘范围,使装置能够不仅适用于猕猴桃树、桃树等树形较矮、果实普遍低垂的果树,还可适用于枇杷、苹果等树形高且果实位置高的果树,有效地扩大了装置的适用范围,且结构简单,易于推广。
技术特征:
1.一种用于果实的无损采摘装置,其特征在于:包括采摘执行器、机械手、行进机构(4)、连接架(3),所述行进机构(4)的顶部设有连接架(3),所述连接架(3)的顶部设有机械手,所述机械手远离所述连接架(3)的一端设有采摘执行器,所述采摘执行器包括有末端电机(102)、仿生手指(101),所述末端电机(102)用于控制所述仿生手指(101)动作采摘果实,所述机械手为直角坐标型机械手;
2.根据权利要求1所述的用于果实的无损采摘装置,其特征在于:所述机械手包括底座(201)、机械臂(202)、转动机构(203),所述机械臂(202)通过所述转动机构(203)与所述底座(201)转动连接。
3.根据权利要求2所述的用于果实的无损采摘装置,其特征在于:所述机械手可安设若干个机械臂(202),所述机械臂(202)与机械臂(202)之间均通过所述转动机构(203)连接,至少一个机械臂(202)与所述底座(201)连接。
4.根据权利要求1所述的用于果实的无损采摘装置,其特征在于:所述连接架(3)包括支架(301)、电动升降台(302),所述行进机构(4)顶部与所述支架(301)连接,所述支架(301)顶部设有升降台,所述机械手安设于所述电动升降台(302)顶部。
5.根据权利要求1所述的用于果实的无损采摘装置,其特征在于:还包括波纹管(6)、果实筐(5),所述果实筐(5)安设于所述连接架(3)顶部,所述波纹管(6)的一端与所述果实筐(5)贯通,所述波纹管(6)的另一端与所述后手指的空档位置连接。
6.根据权利要求4所述的用于果实的无损采摘装置,其特征在于:还包括控制模块,所述控制模块与所述行进机构(4)、末端电机(102)、转动机构(203)、电动升降台(302)均电性连接。
7.根据权利要求6所述的用于果实的无损采摘装置,其特征在于:还包括压力传感器、测距传感器、变频控制器、速度传感器,所述压力传感器安设在所述后手指与果实的接触面上,所述行进机构(4)的四周安设有若干测距传感器,所述行进机构(4)上还安设有速度传感器,所述行进机构(4)、变频控制器、控制模块依次电性连接,所述压力传感器、测距传感器、速度传感器均与所述控制模块电性连接。
技术总结
本技术公开了一种用于果实的无损采摘装置,涉及果实无损采摘技术领域,本技术通过设有直角坐标型机械手,能够控制采摘执行器对不同方位、不同角度的果实进行采摘,还设置有带电动升降台的连接架,进一步拓展了装置的采摘范围,使装置能够不仅适用于猕猴桃树、桃树等树形较矮、果实普遍低垂的果树,还可适用于枇杷、苹果等树形高且果实位置高的果树,有效地扩大了装置的适用范围,且结构简单,易于推广。
技术研发人员:蔺丽莉,陈婧铱
受保护的技术使用者:北京信息职业技术学院
技术研发日:20220906
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!