一种甘蓝收获机夹持带的柔性张紧摆动机构的制作方法
本技术涉及农业机械中的球形蔬菜收获机械,特别是一种甘蓝收获机夹持带的柔性张紧摆动机构。
背景技术:
1、甘蓝是蔬菜种植的主要品种之一,但其采收机械化水平比较落后,直到目前为止,甘蓝的收获仍然依赖人工作业,采收效率低、劳动强度大、生产成本高。
2、为此 ,近年来创新出一些适用于甘蓝收获的机械装置 ,如已公开的“一种结球甘蓝收获机的夹持输送装置”(专利号 2018221709581)。该装置的皮带张紧主要依靠手工调节张紧,即在底盘安装时,通过手工调式一次性定位张紧。如果使用一段时间后出现皮带松松弛的现象,只有再通过人式进行调节。
3、因本实用新型是应用于甘蓝收获机械的,其甘蓝植物的外形大小不一,如果收获机械中柔性夹持带始终保持一成不变的状态,显然极易挤压损坏甘蓝,无法保证采收效率和产品质量。
技术实现思路
1、本实用新型所要解决的难题是,针对上述现有技术存在的不足,提供一种甘蓝收获机夹持带的柔性张紧摆动机构,可使两个对称设置的夹持带轮的喂入口,能够随着甘蓝大小的变化而进行自动调节,减少采收过程中的破损率,确保甘蓝实现柔性收获。
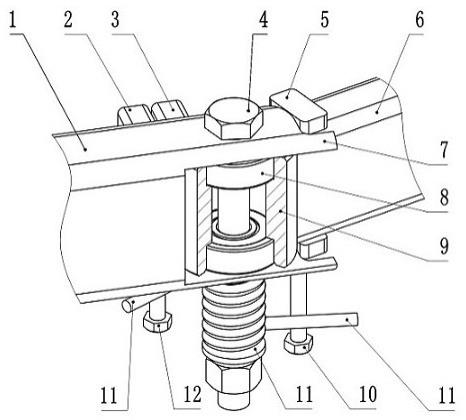
2、本实用新型的技术方案是,摆动杆1与固定杆6之间通过螺栓弹性连接机构进行连接,所述螺栓弹性连接机构包括连接螺栓4、轴承8、轴承座9和扭转弹簧11,轴承座9与固定杆6为一体式结构,轴承8设置于轴承座9内,连接螺栓4穿过摆动杆1和轴承8使摆动杆1与固定杆6相连接;连接螺栓4上设有扭转弹簧11,并由螺母进行轴向固定;摆动杆1在扭转弹簧13的作用下,相对固定杆6水平弹性摆动。
3、摆动杆1与固定杆6连接处的端部设有旋转定位角7,固定杆6的管端设有转角定位块5,其摆动杆1相对固定杆6摆动的限位角度α为160°~180°之间。
4、旋转定位角7上下对称设置,与摆动杆1为一体式结构。
5、摆动杆1上设有止动块2,轴承座9上设有可对摆动杆1的旋转角度进行止动限位的限位块3。
6、固定杆6和摆动杆1的底部还分别设有压紧螺栓一10、压紧螺栓二12,扭转弹簧11的两个根部分别卡在压紧螺栓一10和压紧螺栓二12上,可推动摆动杆1与固定杆6保持弹性扭转力。
7、本实用新型与现有技术相对比所具备的优点是,摆动杆1可在弹簧力的作用下自由弹性摆动,从而使两个对称设置的夹持带喂入口,能够随着甘蓝大小的变化而进行自动调节,避免了在采收切割的过程中挤压损坏甘蓝的现象,减少采收过程中的破损率,提高采收效率和产品收获质量,确保甘蓝实现柔性收获。
技术特征:
1.一种甘蓝收获机夹持带的柔性张紧摆动机构,其特征在于:摆动杆(1)与固定杆(6)之间通过螺栓弹性连接机构进行连接,所述螺栓弹性连接机构包括连接螺栓(4)、轴承(8)、轴承座(9)和扭转弹簧(11),轴承座(9)与固定杆(6)为一体式结构,轴承(8)设置于轴承座(9)内,连接螺栓(4)穿过摆动杆(1)和轴承(8)使摆动杆(1)与固定杆(6)相连接;连接螺栓(4)上设有扭转弹簧(11),并由螺母进行轴向固定;摆动杆(1)在扭转弹簧(11)的作用下,相对固定杆(6)水平弹性摆动。
2.如权利要求1所述的一种甘蓝收获机夹持带的柔性张紧摆动机构,其特征在于:摆动杆(1)与固定杆(6)连接处的端部设有旋转定位角(7),固定杆(6)的管端设有转角定位块(5),其摆动杆(1)相对固定杆(6)摆动的限位角度α为160°~180°之间。
3.如权利要求2所述的一种甘蓝收获机夹持带的柔性张紧摆动机构,其特征在于:旋转定位角(7)上下对称设置,与摆动杆(1)为一体式结构。
4.如权利要求1或2所述的一种甘蓝收获机夹持带的柔性张紧摆动机构,其特征在于:摆动杆(1)上设有止动块(2),轴承座(9)上设有可对摆动杆(1)的旋转角度进行止动限位的限位块(3)。
5.如权利要求1所述的一种甘蓝收获机夹持带的柔性张紧摆动机构,其特征在于:固定杆(6)和摆动杆(1)的底部还分别设有压紧螺栓一(10)、压紧螺栓二(12),扭转弹簧(11)的两个根部分别卡在压紧螺栓一(10)和压紧螺栓二(12)上,可推动摆动杆(1)与固定杆(6)保持弹性扭转力。
技术总结
本技术涉及一种农业机械中的甘蓝收获机械,特别是一种甘蓝收获机夹持带的柔性张紧摆动机构,摆动杆(1)与固定杆(6)之间通过连接螺栓(4)、轴承(8)、轴承座(9)和扭转弹簧(11)进行连接;轴承座(9)与固定杆(6)为一体式结构,连接螺栓(4)上设有扭转弹簧(11),并由螺母进行轴向固定;摆动杆(1)在扭转弹簧(13)的作用下,可相对固定杆(6)水平弹性摆动。其优点是,随着摆动杆1的自由弹性摆动,可使两个对称设置的夹持带喂入口,能够随着甘蓝大小的变化而进行自动调节,避免了在采收切割的过程中挤压损坏甘蓝的现象,减少采收过程中的破损率,提高采收效率和产品收获质量,确保甘蓝实现柔性收获。
技术研发人员:夏建林,曹光乔,宋志禹,万号,张健飞,孙洪友,孙正涛
受保护的技术使用者:江苏悦达黄海拖拉机制造有限公司
技术研发日:20221212
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!