一种用于水培蔬菜的采摘机器人的制作方法
本申请涉及水培蔬菜,尤其是涉及一种用于水培蔬菜的采摘机器人。
背景技术:
1、目前,水培蔬菜是指大部分根系生长在营养液液层中,只通过营养液为其提供水分、养分、氧气的有别于传统土壤栽培形式下进行栽培的蔬菜。水培是无土栽培的一种,分类于无基质栽培,无基质栽培类型是指植物根系生长的环境中没有基质固定根系,根系生长在营养液或含有营养液的潮湿空气中。
2、现有公开号为cn204031842u的中国专利,其公开了一种蔬菜采摘小车。所述蔬菜采摘小车包括固定杆1、悬臂梁2、转轴3、升降管4、电源控制器5、采摘装置6、小车本体7、储物仓8,所述小车本体的前端固定安装有固定杆、后端设有储物仓;所述连接于固定杆顶端的转轴两侧固定安装有两个悬臂梁;所述升降管上端固定连接于悬臂梁、下端固定连接于采摘装置,该采摘装置连接有电源控制器。
3、运用中,将小车本体移动至需要采摘素菜的位置,然后升降管驱动采摘装置向蔬菜移动,待采摘装置插入泥土后,采摘装置将蔬菜从泥土拔出,之后将拔出的蔬菜放置在储物仓内,随后工作人员再将带有泥土的蔬菜根部进行切除。
4、针对上述中的相关技术,发明人认为蔬菜采摘之后工作人员还需要手动对根部进行切割,影响蔬菜的采摘的效率。
技术实现思路
1、为了改善蔬菜采摘之后工作人员还需要手动对根部进行切割,影响蔬菜采摘效率的问题,本申请提供一种用于水培蔬菜的采摘机器人。
2、本申请提供的一种用于水培蔬菜的采摘机器人采用如下的技术方案:
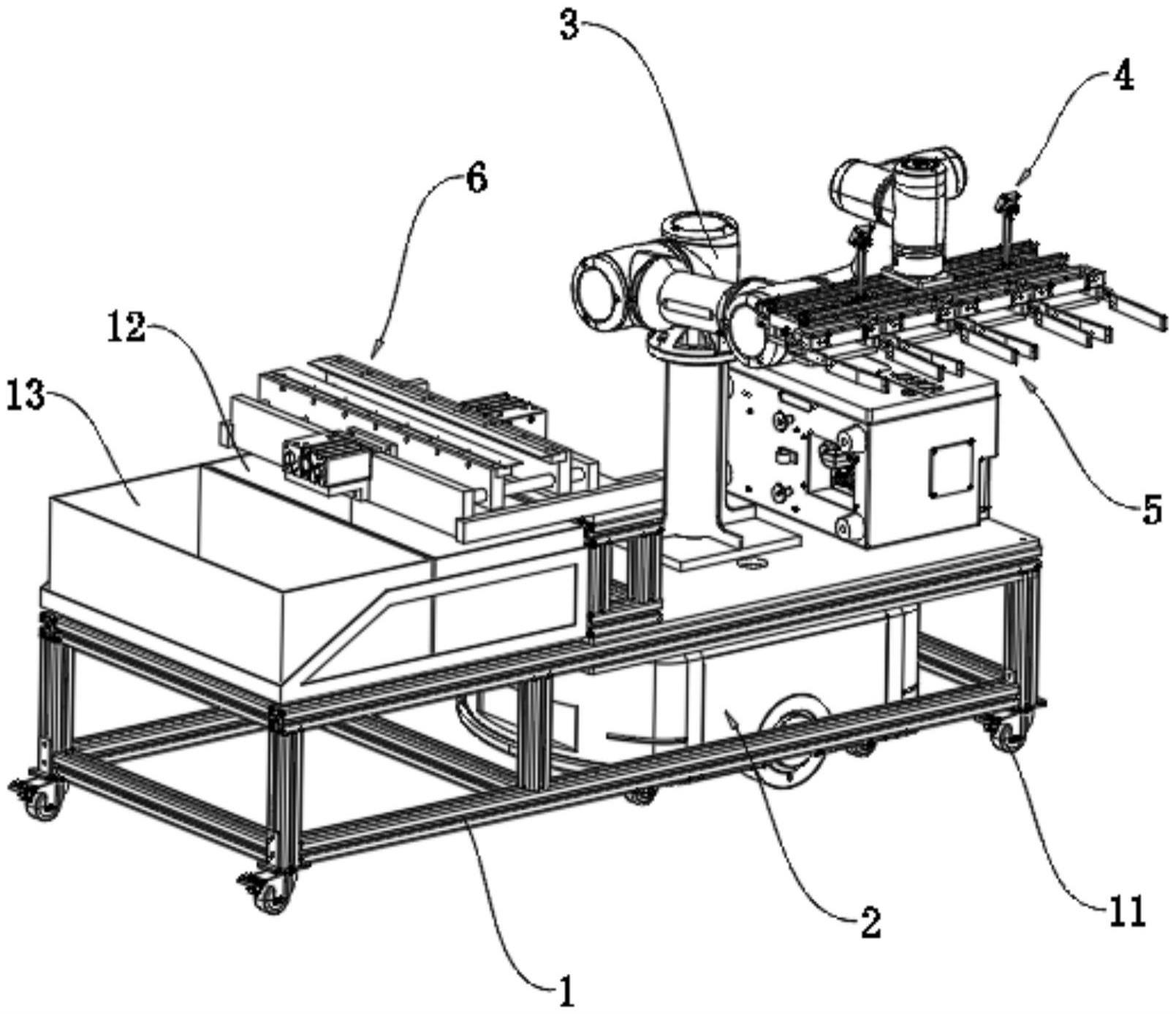
3、一种用于水培蔬菜的采摘机器人,包括机架,所述机架上设置有滚轮,所述机架上设置有移动组件,所述机架上设置有机械臂,所述机械臂上设置有定位组件与夹持组件,所述定位组件对蔬菜进行定位,所述夹持组件将蔬菜夹起;所述机架上设置有第一料斗与第二料斗,所述机架靠近所述第一料斗的上侧设置有切根组件,所述切根组件对蔬菜根部进行切割,所述切根组件对蔬菜切根后,所述机械臂将蔬菜放置在所述第二料斗内。
4、可选的,所述移动组件包括驱动车,所述驱动车安装在所述机架的下侧,且所述驱动车上设置有辅助轮与主动轮,所述辅助轮向靠近地面的一侧延伸,所述主动轮在所述驱动车上转动。
5、可选的,所述定位组件包括调节座,所述调节座安装在所述机械臂上,所述调节座上转动安装有支撑环,所述支撑环上安装有摄像头。
6、可选的,所述夹持组件包括第一基板与第二基板,所述第一基板与第二基板安装在所述机械臂上,且所述第一基板与第二基板之间设置有夹板,所述夹板在所述第一基板与第二基板之间相对设置有两个,两个所述夹板在所述第一基板与第二基板之间滑动。
7、可选的,所述第一基板与第二基板之间设置有第一连杆、第二连杆以及滑块,所述夹板安装在所述滑块上,所述第一连杆、第二连杆与所述滑块对应,且所述第一连杆的一端与对应的所述滑块铰接,另一端与所述第二连杆铰接,所述第二连杆的另一端转动连接在所述第一基板与第二基板之间;所述第一基板的一侧设置有第一驱动气缸,所述第一驱动气缸的活塞杆上设置有驱动块,所述驱动块上设置有齿条,两个所述第二连杆上均设置有齿轮,所述齿轮与所述齿条啮合。
8、可选的,两个所述夹板相互靠近的一侧均形成有避让槽,所述夹板靠近所述避让槽的一侧设置有橡胶条,所述橡胶条与所述夹板对应。
9、可选的,所述切根组件包括第二驱动气缸,所述第二驱动气缸在所述机架上相对设置有两个,两个所述第二驱动气缸之间设置有切刀,所述切刀安装在所述第二驱动气缸活塞杆上。
10、综上所述,本申请包括以下至少一种用于水培蔬菜的采摘机器人有益技术效果:
11、运用中,移动组件将机架通过滚轮移动至需要采摘的蔬菜一侧,然后定位组件对蔬菜进行定位,机械臂将夹持组价向靠近蔬菜的一侧移动,之后夹持组件将蔬菜夹起,随后机械臂将蔬菜移动至第一料斗的上侧,切根组件将蔬菜的根部切下,切下的根部掉落在第一料斗内,最后机械臂将蔬菜移动至第二料斗的上侧,夹持组件松开蔬菜,蔬菜掉落在第二料斗内,能够省去蔬菜采摘之后工作人员还需要手动对蔬菜的根部进行切割,提升蔬菜的采摘效率。
技术特征:
1.一种用于水培蔬菜的采摘机器人,包括机架(1),所述机架(1)上设置有滚轮(11),其特征在于:所述机架(1)上设置有移动组件(2),所述机架(1)上设置有机械臂(3),所述机械臂(3)上设置有定位组件(4)与夹持组件(5),所述定位组件(4)对蔬菜进行定位,所述夹持组件(5)将蔬菜夹起;所述机架(1)上设置有第一料斗(12)与第二料斗(13),所述机架(1)靠近所述第一料斗(12)的上侧设置有切根组件(6),所述切根组件(6)对蔬菜根部进行切割,所述切根组件(6)对蔬菜切根后,所述机械臂(3)将蔬菜放置在所述第二料斗(13)内。
2.根据权利要求1所述的一种用于水培蔬菜的采摘机器人,其特征在于:所述移动组件(2)包括驱动车(21),所述驱动车(21)安装在所述机架(1)的下侧,且所述驱动车(21)上设置有辅助轮(22)与主动轮(23),所述辅助轮(22)向靠近地面的一侧延伸,所述主动轮(23)在所述驱动车(21)上转动。
3.根据权利要求1所述的一种用于水培蔬菜的采摘机器人,其特征在于:所述定位组件(4)包括调节座(41),所述调节座(41)安装在所述机械臂(3)上,所述调节座(41)上转动安装有支撑环(42),所述支撑环(42)上安装有摄像头(43)。
4.根据权利要求1所述的一种用于水培蔬菜的采摘机器人,其特征在于:所述夹持组件(5)包括第一基板(51)与第二基板(52),所述第一基板(51)与第二基板(52)安装在所述机械臂(3)上,且所述第一基板(51)与第二基板(52)之间设置有夹板(55),所述夹板(55)在所述第一基板(51)与第二基板(52)之间相对设置有两个,两个所述夹板(55)在所述第一基板(51)与第二基板(52)之间滑动。
5.根据权利要求4所述的一种用于水培蔬菜的采摘机器人,其特征在于:所述第一基板(51)与第二基板(52)之间设置有第一连杆(511)、第二连杆(521)以及滑块(54),所述夹板(55)安装在所述滑块(54)上,所述第一连杆(511)、第二连杆(521)与所述滑块(54)对应,且所述第一连杆(511)的一端与对应的所述滑块(54)铰接,另一端与所述第二连杆(521)铰接,所述第二连杆(521)的另一端转动连接在所述第一基板(51)与第二基板(52)之间;所述第一基板(51)的一侧设置有第一驱动气缸(56),所述第一驱动气缸(56)的活塞杆上设置有驱动块(561),所述驱动块(561)上设置有齿条(562),两个所述第二连杆(521)上均设置有齿轮(522),所述齿轮(522)与所述齿条(562)啮合。
6.根据权利要求4所述的一种用于水培蔬菜的采摘机器人,其特征在于:两个所述夹板(55)相互靠近的一侧均形成有避让槽(551),所述夹板(55)靠近所述避让槽(551)的一侧设置有橡胶条(552),所述橡胶条(552)与所述夹板(55)对应。
7.根据权利要求1所述的一种用于水培蔬菜的采摘机器人,其特征在于:所述切根组件(6)包括第二驱动气缸(61),所述第二驱动气缸(61)在所述机架(1)上相对设置有两个,两个所述第二驱动气缸(61)之间设置有切刀(62),所述切刀(62)安装在所述第二驱动气缸(61)活塞杆上。
技术总结
本申请涉及一种用于水培蔬菜的采摘机器人,涉及水培蔬菜技术领域,其包括机架,所述机架上设置有滚轮,所述机架上设置有移动组件,所述机架上设置有机械臂,所述机械臂上设置有定位组件与夹持组件,所述定位组件对蔬菜进行定位,所述夹持组件将蔬菜夹起;所述机架上设置有第一料斗与第二料斗,所述机架靠近所述第一料斗的上侧设置有切根组件,所述切根组件对蔬菜根部进行切割,所述切根组件对蔬菜切根后,所述机械臂将蔬菜放置在所述第二料斗内。本申请具有省去蔬菜采摘之后工作人员还需要手动对蔬菜的根部进行切割,提升蔬菜采摘效率的效果。
技术研发人员:杜万和
受保护的技术使用者:上海曼文勒思数字科技有限公司
技术研发日:20221223
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!