作业机的制作方法
本发明涉及拖拉机等作业机。
背景技术:
1、现有技术中,作为创建农业机械的目标行驶路径的技术,已知有专利文献1。
2、专利文献1的作业车辅助系统具有:本车位置检测模块,检测作业车的本车位置;未作业区域外形地图计算部,根据在作业预定区域的外周进行环绕作业行驶时由本车位置检测模块获取到的本车位置数据,来计算作业预定区域内的未作业区域的外形地图;以及路径计算部,基于通过未作业区域外形地图计算部计算出的外形地图,计算用于在未作业区域作业行驶的目标行驶路径。
3、现有技术文献
4、专利文献
5、专利文献1:日本公开专利公报“日本特开2017-55673号公报”。
技术实现思路
1、发明所要解决的问题
2、在专利文献1中,计算未作业区域的外形地图,在计算出的外形地图上创建目标行驶路径。然而,在专利文献1所公开的技术中,在田地中配置有垄、农作物等,形成有作业机无法行驶的部位(不可行驶线)的情况下,存在无法创建优选的目标行驶路径的实情,例如行驶车辆的行驶装置侵入不可行驶线等。
3、本发明是为了解决这样的现有技术的问题点而完成的,目的在于,提供一种无论田地的状态如何均能够行驶在适当的路径(行驶路径)上的作业机。
4、解决问题的技术手段
5、本发明的一个方式的作业机具有:车体;第一作业装置,能够安装于所述车体;行驶装置,设置于所述车体;第一获取部,获取复数个从田地的一端侧向另一端侧延伸的不可行驶线,所述复数个不可行驶线每隔第一间隔形成;以及路径创建部,基于所述第一获取部获取到的所述复数个不可行驶线,创建包含所述车体所行驶的复数个第一部分的第一路径,所述复数个第一部分从所述田地的所述一端侧向所述另一端侧延伸。所述行驶装置以与所述第一间隔对应的长度分离地配置。所述路径创建部具有:线定义部,基于所述第一获取部获取到的所述复数个不可行驶线,将所述田地中的所述复数个不可行驶线以外的区域定义为复数个可行驶线;以及设定部,基于所述线定义部所定义的所述复数个可行驶线,将从所述田地的所述一端侧向所述另一端侧延伸并且所述行驶装置行驶在所述复数个可行驶线上的路径设定为所述复数个第一部分。
6、所述行驶装置包括:第一行驶部,其设置于所述车体;和第二行驶部,以在所述第一行驶部位于一个可行驶线的情况下,所述第二行驶部以位于其他可行驶线的方式,分离地设置于所述车体。所述设定部也可以从所述复数个可行驶线中提取两个可行驶线,并基于该提取出的两个可行驶线分别设定所述复数个第一部分。
7、作业机具有第二获取部,所述第二获取部获取所述第一作业装置的作业宽度即第二间隔,所述设定部也可以基于所述第二获取部获取到的所述第二间隔,以相互相邻的两个直行部的间隔与所述第二间隔实质上相同的方式设定所述复数个第一部分。
8、所述第一获取部也可以获取从所述田地的所述一端侧向所述另一端侧或者从所述另一端侧向所述一端侧并以每隔所述第一间隔进行了作业的复数个作业线,作为所述复数个不可行驶线。
9、由所述第一获取部作为所述复数个不可行驶线获取的所述复数个作业线,也可以是起垄作业的垄线、以及进行农作物的种子播种作业或农作物的栽种作业的农作物线。
10、作业机具有:路径获取部,获取所述车体在所述田地进行作业时的第二路径;第二作业装置,能够安装于所述车体,并且进行所述第一作业装置所进行的第一作业之前的第二作业;以及连结装置,将所述第一作业装置和所述第二作业装置中的任意一方与所述车体连结。所述第二作业装置能够每隔所述第一间隔进行作业。所述路径获取部获取连结有所述第二作业装置的所述车体所行驶的、从所述田地所述一端侧向所述另一端侧延伸的复数个第二部分,作为所述第二路径。所述复数个不可行驶线,是所述车体行驶在所述复数个第二部分上,并且所述第二作业装置从所述田地的所述一端侧向所述另一端侧或者从所述另一端侧向所述一端侧进行第二作业并以每隔所述第一间隔形成的复数个作业线。所述设定部也可以通过基于所述线定义部所定义的所述复数个可行驶线,使所述路径获取部获取到的所述第二路径移位来设定所述复数个第一部分。
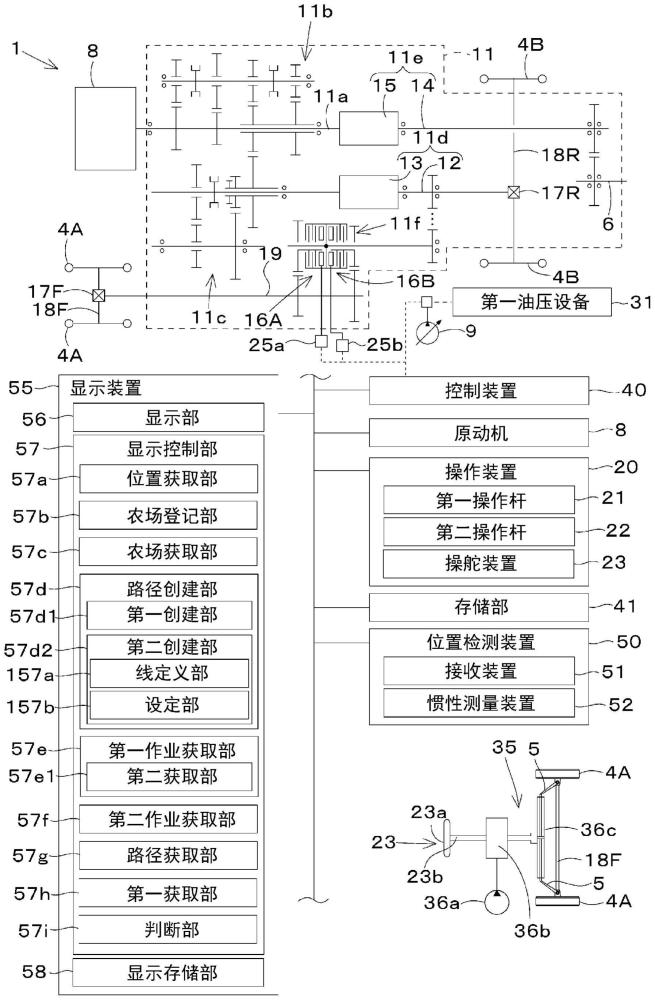
11、作业机也可以具有:位置检测装置,检测所述车体的位置;以及显示装置,显示由所述位置检测装置检测出的所述车体的位置和所述路径创建部创建出的所述第一路径。
12、作业机也可以具有:位置检测装置,检测所述车体的位置;以及自动操舵控制部,基于所述位置检测装置检测出的所述车体的位置和所述路径创建部创建出的所述第一路径,控制所述行驶装置的操舵。
13、作业机也可以具有:位置检测装置,检测所述车体的位置;以及自动行驶控制部,基于所述位置检测装置检测出的所述车体的位置和所述路径创建部创建出的所述第一路径,控制所述行驶装置的操舵以及车速。
14、发明效果
15、根据上述作业机,无论田地的状态如何均能够行驶在适当的路径上。
技术特征:
1.一种作业机,其中,
2.根据权利要求1所述的作业机,其中,
3.根据权利要求1或2所述的作业机,其中,
4.根据权利要求1~3中任一项所述的作业机,其中,
5.根据权利要求4所述的作业机,其中,
6.根据权利要求1~5中任一项所述的作业机,其中,
7.根据权利要求1~6中任一项所述的作业机,其中,
8.根据权利要求1~6中任一项所述的作业机,其中,
9.根据权利要求1~6中任一项所述的作业机,其中,
技术总结
本发明无论田地(G)的状态如何均能够行驶在适当的路径上。作业机(1)具有:车体(2);第一作业装置(60A),能够安装于车体(2);行驶装置(4);第一获取部(57h),获取田地(G)的每隔第一间隔(x)形成的复数个不可行驶线(R1);和路径创建部(57d),基于复数个不可行驶线(R1),创建包含复数个第一部分(La1)的第一路径(L1)。行驶装置(4)以与第一间隔(x)对应的长度分离地配置。路径创建部(57d)具有:线定义部(157a),基于第一获取部(57h)获取到的复数个不可行驶线(R1),将田地(G)中的复数个不可行驶线(R1)以外的区域定义为复数个可行驶线(R2);和设定部(157b),基于由线定义部(157a)所定义的复数个可行驶线(R2),将从田地(G)的一端侧向另一端侧延伸并且行驶装置(4)行驶在复数个可行驶线(R2)上的路径设定为复数个第一部分(La1)。
技术研发人员:岛田航太郎,阪口和央,高桥祐介,森下孝文
受保护的技术使用者:株式会社久保田
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!