一种遥控水稻插秧机转向控制系统的制作方法
本发明涉及水稻插秧机,具体为一种遥控水稻插秧机转向控制系统。
背景技术:
1、稻谷是国内第一大主粮,随着生活水平地提高、城市化的进程、饮食结构的变化等因素影响,稻谷在三大主粮的口粮占比仍在增加,近10年全国水稻种植面积一直稳定在4.5亿亩左右;据2020年中国农业展望大会的数据,今后10年,水稻种植面积仍会稳定增加,针对丘陵山区稻田地形地势复杂多变,水稻经营规模小而散的特点研发,再则丘陵山区种植户对适宜插秧机的迫切需求,丘陵山区地形地势复杂多变,稻田小、散、乱的特点,急需研究开发能在小、乱、转移不便的稻田有效适用的微型插秧机,以解决丘陵山区现行无好机可用的情况,为此本申请提出一种遥控水稻插秧机转向控制系统。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种遥控水稻插秧机转向控制系统,具备满足丘陵地区使用且提高插秧效率的优点,解决了丘陵山区地形地势复杂多变,稻田小、散、乱的问题。
3、(二)技术方案
4、为实现上述目的,本发明提供如下技术方案:一种遥控水稻插秧机转向控制系统,所述转向控制系统包括无线遥控系统研制、移箱机构设计、转向控制系统、插植机构优化,所述转向控制系统具体包含明确转向机构设计方向、收集转向机构资料、提出转向设计方案、确定方案、进行硬件改造、进行转向控制算法、仿真分析、台驾实验与完成转角试验;
5、所述转向机构设计方向包含秧箱移动机构设计、驱动机构设计、无线遥感系统研制;
6、所述台驾实验与完成转角试验包含样机试制与样机性能试验。
7、优选的,所述无线遥控系统研制采用单片机作为插秧机遥控系统的控制核心,在插秧机无线遥控系统中,采用手持控制端和机载接收端两个部分。
8、优选的,所述移箱机构设计实现秧箱的自动进给及换向,需要通过机构实现步进横移和换向两个动作来实现。
9、优选的,所述转向控制系统的方向控制主要是通过远程遥控转向执行机构实现自动转向。
10、优选的,所述插植机构优化插秧机的插植机构为曲柄连杆机构。
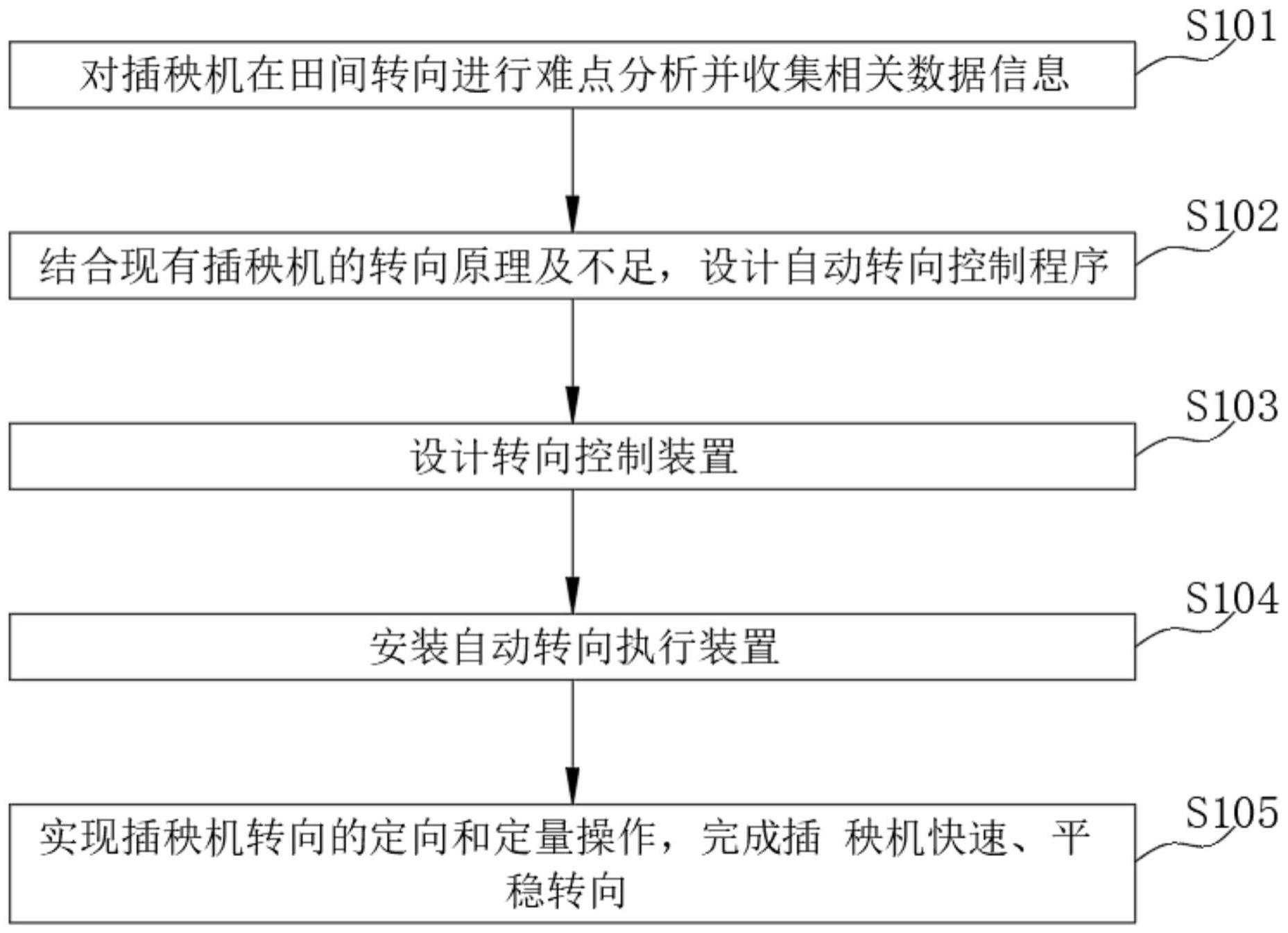
11、优选的,遥控水稻插秧机转向控制系统,包含以下流程:
12、s101、对插秧机在田间转向进行难点分析并收集相关数据信息;
13、s102、结合现有插秧机的转向原理及不足,设计自动转向控制程序;
14、s103、设计转向控制装置;
15、s104、安装自动转向执行装置;
16、s105、实现插秧机转向的定向和定量操作,完成插秧机快速、平稳转向。
17、与现有技术相比,本发明提供了一种遥控水稻插秧机转向控制系统,具备以下有益效果:
18、1、该遥控水稻插秧机转向控制系统,转向控制系统的方向控制主要是通过远程遥控转向执行机构实现自动转向,要对插秧机在田间转向进行难点分析,结合现有插秧机的转向原理及不足,设计自动转向控制程序,设计转向控制装置,安装自动转向执行装置,实现插秧机转向的定向和定量操作,完成插秧机快速、平稳转向,进而满足丘陵地区使用且提高插秧效率。
技术特征:
1.一种遥控水稻插秧机转向控制系统,其特征在于:所述转向控制系统包括无线遥控系统研制、移箱机构设计、转向控制系统、插植机构优化,所述转向控制系统具体包含明确转向机构设计方向、收集转向机构资料、提出转向设计方案、确定方案、进行硬件改造、进行转向控制算法、仿真分析、台驾实验与完成转角试验;
2.根据权利要求1所述的遥控水稻插秧机转向控制系统,其特征在于:所述无线遥控系统研制采用单片机作为插秧机遥控系统的控制核心,在插秧机无线遥控系统中,采用手持控制端和机载接收端两个部分。
3.根据权利要求1所述的遥控水稻插秧机转向控制系统,其特征在于:所述移箱机构设计实现秧箱的自动进给及换向,需要通过机构实现步进横移和换向两个动作来实现。
4.根据权利要求1所述的遥控水稻插秧机转向控制系统,其特征在于:所述转向控制系统的方向控制主要是通过远程遥控转向执行机构实现自动转向。
5.根据权利要求1所述的遥控水稻插秧机转向控制系统,其特征在于:所述插植机构优化插秧机的插植机构为曲柄连杆机构。
6.根据权利要求1所述的遥控水稻插秧机转向控制系统,其特征在于:包含以下流程:
技术总结
本发明涉及水稻插秧机技术领域,且公开了一种遥控水稻插秧机转向控制系统,转向控制系统包括无线遥控系统研制、移箱机构设计、转向控制系统、插植机构优化,转向机构设计方向包含秧箱移动机构设计、驱动机构设计、无线遥感系统研制,台驾实验与完成转角试验包含样机试制与样机性能试验。该遥控水稻插秧机转向控制系统,转向控制系统的方向控制主要是通过远程遥控转向执行机构实现自动转向,要对插秧机在田间转向进行难点分析,结合现有插秧机的转向原理及不足,设计自动转向控制程序,设计转向控制装置,安装自动转向执行装置,实现插秧机转向的定向和定量操作,完成插秧机快速、平稳转向,进而满足丘陵地区使用且提高插秧效率。
技术研发人员:何俊峰,周小波,吴志强,陈进,王利,吴瑕玉,褚红春,李筠,赵若海,张艳,陈燕英
受保护的技术使用者:四川省农业机械研究设计院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!