一种智能自动找底电子漂系统的制作方法
本发明涉及鱼漂,尤其涉及一种智能自动找底电子漂系统。
背景技术:
1、在日常生活过程中,钓鱼作为休闲项目深受人们的喜爱,在钓鱼过程中经常需要根据水深调整鱼线上浮漂的位置,实现找底操作,以提高钓鱼的效果。
2、目前常见的找底操作是通过上下两块磁铁夹住主线的原理实现自动找底,该种方式容易导致浮漂的体质大、质量大、大大降低了灵敏度,并且找底的精准度较差,且无法适合野外复杂的自然水域,因此需要一种智能自动找底电子漂系统。
技术实现思路
1、本发明的目的是针对背景技术中存在的问题,提出的一种智能自动找底电子漂系统,使其便于实现自动找底操作,且找底精确度较高。
2、本发明的技术方案:一种智能自动找底电子漂系统,包括:漂尾,所述漂尾底部固定连接有漂体,所述漂体下方设有鱼线,所述鱼线一端固定连接有鱼钩,所述漂体内设有用于实现自动找底的控制机构,所述漂体内下端设有用于实现鱼线的放线和锁线的锁线机构。
3、优选的,所述漂尾和漂体为一体机构,所述控制机构包括电路板,所述电路板安装于漂体内,所述电路板一侧设有地线端子和二号信号检测端子,所述地线端子和二号信号检测端子均安装于漂体内,所述漂体内位于电路板下方安装有锂电池,所述漂体内位于锂电池下方安装有进步电机,所述漂尾内顶部安装有一号信号检测端子,所述一号信号检测端子下方设有电连导线,通过控制机构便于控制锁线机构进行工作,实现自动找底操作。
4、优选的,所述电路板包括控制器、延时电路、指示灯,所述控制器为微处理器包含延时电路。
5、优选的,所述锂电池均通过电连导线分别与一号信号检测端子、电路板、地线端子、二号信号检测端子、进步电机连接。
6、优选的,所述电路板上的控制器分别与进步电机、指示灯、一号信号检测端子、二号信号检测端子、地线端子电连接。
7、优选的,所述鱼线靠近鱼钩一端固定连接有铅坠,铅坠便于使漂尾和漂体处于直立状态。
8、优选的,所述进步电机下方设有扭力弹簧,所述锁线机构包括锁线杆,所述锁线杆竖直位于扭力弹簧下方,所述进步电机输出端通过扭力弹簧与锁线杆顶端连接,所述漂体下方设有漂脚,所述漂脚顶端伸进漂体内与锁线杆底端连接,所述锁线杆上水平贯穿开设有通孔,所述漂体两侧位于通孔相对位置均贯穿开设有侧孔,所述鱼线远离鱼钩一端均贯穿两个侧孔和通孔。通过锁线机构便于实现放线或锁线操作,达到自动找底的目的。
9、优选的,所述漂脚上端固定套设有密封圈,所述密封圈远离漂脚一侧与漂体内侧壁固定连接,通过密封圈便于对漂体内进行密封操作,避免水进入漂体内,对其内部的元件造成损伤。
10、与现有技术相比,本发明具有如下有益的技术效果:通过控制机构针对漂尾和漂体的位置控制锁线机构进行放线和锁线操作,改变鱼漂漂体和漂尾在水下、水面和水上的位置状态,从而实现入水后自动找底操作。
技术特征:
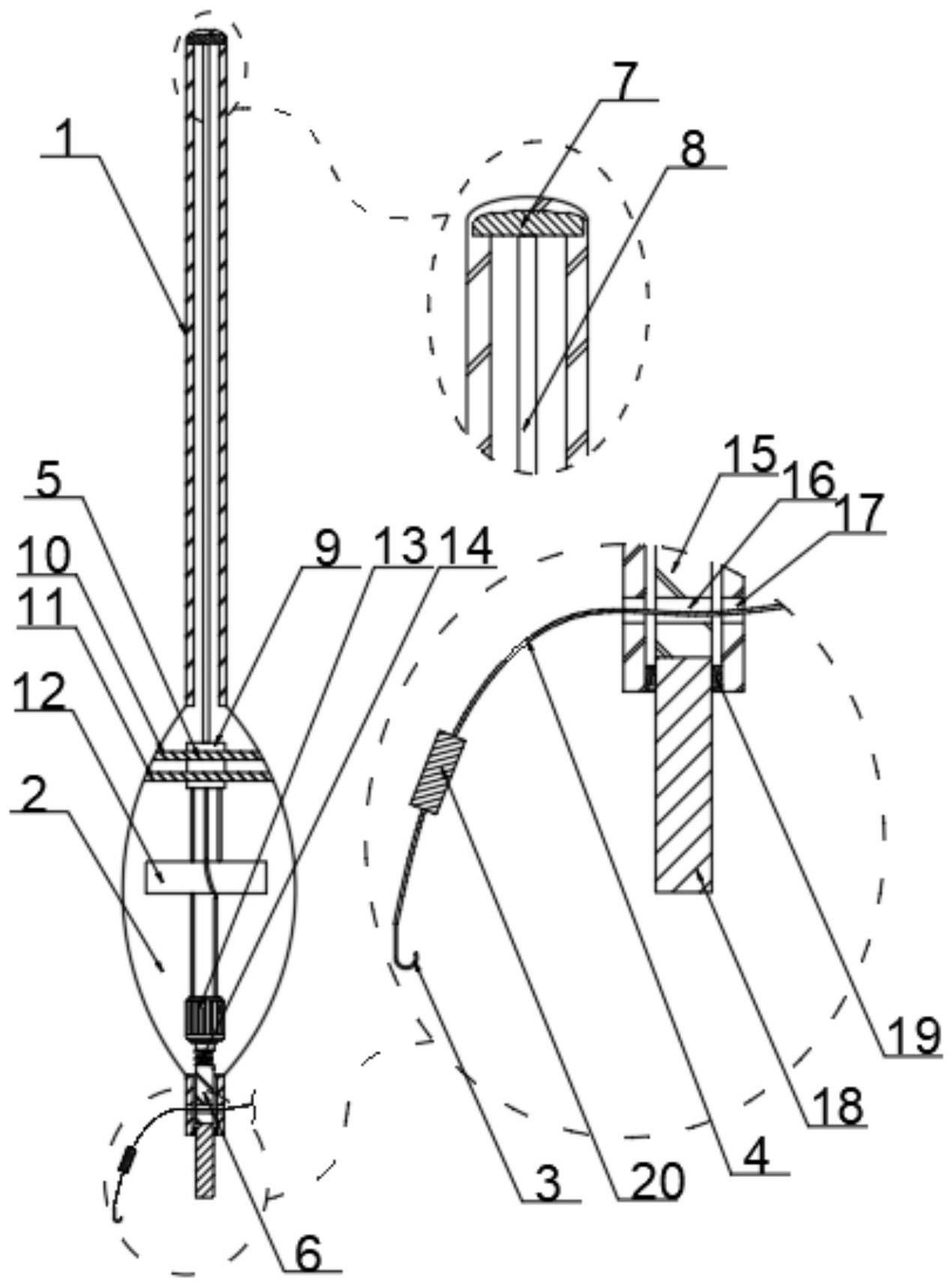
1.一种智能自动找底电子漂系统,包括:漂尾(1),其特征在于:所述漂尾(1)底部固定连接有漂体(2),所述漂体(2)下方设有鱼线(4),所述鱼线(4)一端固定连接有鱼钩(3),所述漂体(2)内设有用于实现自动找底的控制机构(5),所述漂体(2)内下端设有用于实现鱼线(4)的放线和锁线的锁线机构(6)。
2.根据权利要求1所述的一种智能自动找底电子漂系统,其特征在于,所述漂尾(1)和漂体(2)为一体机构,所述控制机构(5)包括电路板(9),所述电路板(9)安装于漂体(2)内,所述电路板(9)一侧设有地线端子(10)和二号信号检测端子(11),所述地线端子(10)和二号信号检测端子(11)均安装于漂体(2)内,所述漂体(2)内位于电路板(9)下方安装有锂电池(12),所述漂体(2)内位于锂电池(12)下方安装有进步电机(13),所述漂尾(1)内顶部安装有一号信号检测端子(7),所述一号信号检测端子(7)下方设有电连导线(8)。
3.根据权利要求2所述的一种智能自动找底电子漂系统,其特征在于,所述电路板(9)包括控制器、延时电路、指示灯,所述控制器为微处理器包含延时电路。
4.根据权利要求2所述的一种智能自动找底电子漂系统,其特征在于,所述锂电池(12)均通过电连导线(8)分别与一号信号检测端子(7)、电路板(9)、地线端子(10)、二号信号检测端子(11)、进步电机(13)连接。
5.根据权利要求2所述的一种智能自动找底电子漂系统,其特征在于,所述电路板(9)上的控制器分别与进步电机(13)、指示灯、一号信号检测端子(7)、二号信号检测端子(11)、地线端子(10)电连接。
6.根据权利要求1所述的一种智能自动找底电子漂系统,其特征在于,所述鱼线(4)靠近鱼钩(3)一端固定连接有铅坠(20)。
7.根据权利要求2所述的一种智能自动找底电子漂系统,其特征在于,所述进步电机(13)下方设有扭力弹簧(14),所述锁线机构(6)包括锁线杆(15),所述锁线杆(15)竖直位于扭力弹簧(14)下方,所述进步电机(13)输出端通过扭力弹簧(14)与锁线杆(15)顶端连接,所述漂体(2)下方设有漂脚(18),所述漂脚(18)顶端伸进漂体(2)内与锁线杆(15)底端连接,所述锁线杆(15)上水平贯穿开设有通孔(16),所述漂体(2)两侧位于通孔(16)相对位置均贯穿开设有侧孔(17),所述鱼线(4)远离鱼钩(3)一端均贯穿两个侧孔(17)和通孔(16)。
8.根据权利要求7所述的一种智能自动找底电子漂系统,其特征在于,所述漂脚(18)上端固定套设有密封圈(19),所述密封圈(19)远离漂脚(18)一侧与漂体(2)内侧壁固定连接。
技术总结
本发明涉及鱼漂技术领域,尤其涉及一种智能自动找底电子漂系统。其技术方案,包括:漂尾,漂尾底部固定连接有漂体,漂体下方设有鱼线,鱼线一端固定连接有鱼钩,漂体内设有用于实现自动找底的控制机构,漂体内下端设有用于实现鱼线的放线和锁线的锁线机构,本发明具有如下有益的技术效果:通过控制机构针对漂尾和漂体的位置控制主线进行放线和锁线操作,改变鱼漂漂体和漂尾在水下、水面和水上的位置状态,从而实现入水后自动找底操作。
技术研发人员:蒋志强
受保护的技术使用者:蒋志强
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!