一种采摘机器人末端执行器
本发明涉及采摘机器的,特别是涉及一种采摘机器人末端执行器。
背景技术:
1、采摘机器人是一种融合人工智能、机电控制、机器视觉、多传感器融合等多学科技术,自主完成目标鲜果的识别、定位、摘取、回收等任务的高度协同系统。近年来随着相关技术和硬件日渐成熟,采摘机器人在柑橘、苹果、猕猴桃、草莓等鲜食水果上的应用已经得到广泛研究并展现出了较好的商业应用前景。采摘机器人的果实摘取是指其利用末端执行器和机械臂使目标果实果梗与枝条分离的过程,是采摘任务中至关重要的一环。现有采摘机器人的果实摘取方式主要有剪除和仿生采摘等两类。
2、我国是梨生产大国,现有梨树栽培总面积94.34万公顷,总产量1607.8万吨,梨树总面积和总产量均占世界的60%以上。采摘是梨生产中至关重要的一环,长期以来一直依靠人工操作,对于劳动力需求量大且集中,成为当前产业发展最大的制约因素之一。当前面向鲜梨的采摘机器人相关的研究仍为空白。由于不同作物果梗直径、长度、生长角度以及果梗与枝条间分离力等形态和生理学因素的不同,难以直接使用其他现有采摘机器人的末端执行器方案。而棚架式梨基本上生长在同一高度,且果轴方向基本上是垂直向下的生长特性,为提高采摘效率及简化采梨机器人的开发,亟需设计一种集成采摘动作的末端执行器。
技术实现思路
1、本发明的目的是提供一种采摘机器人末端执行器,以解决上述现有技术存在的问题,使执行器实现夹紧与采摘动作,机构简单且成本低,便于操控,提高采摘效率。
2、为实现上述目的,本发明提供了如下方案:
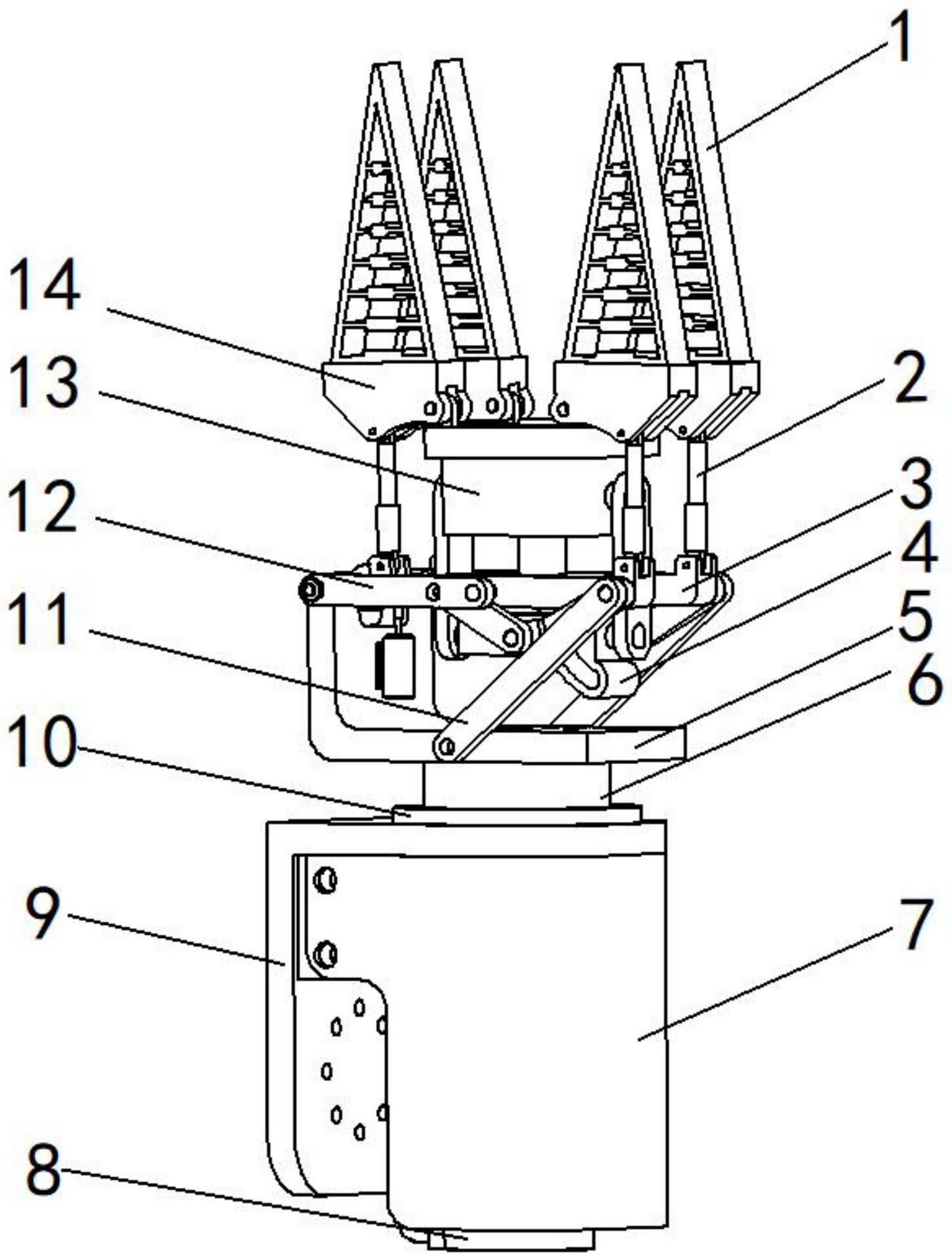
3、本发明提供了一种采摘机器人末端执行器,包括柔性机械指、夹紧机构、折枝机构和转动机构,所述转动机构用于连接采摘机器人,所述转动机构上转动连接有所述折枝机构,所述折枝机构上设置有所述夹紧机构,所述夹紧机构上连接有所述柔性机械指,所述夹紧机构能够使所述柔性机械指张开或者夹紧,所述柔性机械指用于抓取果实。
4、优选的,所述转动机构包括转动电机、电机座和轴筒,所述转动电机设置于所述电机座上,所述转动电机的转轴通过所述轴筒与所述折枝机构的支架连接。
5、优选的,所述电机座上设置有机壳,所述转动电机设置于所述机壳内,所述轴筒与所述电机座之间设置有一支撑环,所述支撑环内设置有一止推轴承。
6、优选的,所述折枝机构包括支架、槽型凸轮、连杆机构和驱动机构,所述支架为l型支架,所述支架的底板与所述转动机构连接、侧板上设置有一u型缺口,所述u型缺口上设置有所述驱动机构,所述驱动机构连接所述连杆机构,所述夹紧机构通过所述连杆机构与所述槽型凸轮连接于所述支架上,所述槽型凸轮与所述夹紧机构的滑座固定连接,所述连杆机构能够使所述槽型凸轮翻转至少15°。
7、优选的,所述槽型凸轮的下端设置有一异形槽,所述异形槽内设置有一轮轴,所述轮轴上套设有滚轮,所述滚轮位于所述异形槽内,所述轮轴的两端与所述连杆机构铰接。
8、优选的,所述连杆机构包括摆动臂和驱动臂,所述摆动臂和所述驱动臂分别对称设置于所述槽型凸轮的两侧,所述摆动臂包括摆臂和支撑臂,所述摆臂的两端分别铰接于所述l型支架的底板和所述夹紧机构的安装座上,所述支撑臂的一端铰接于所述支撑臂的端部铰接轴上、另一端与所述轮轴铰接,所述驱动臂包括长臂和短臂,所述短臂的两端分别铰接于所述长臂的中部和所述轮轴上,所述长臂的两端分别铰接于所述l型支架的侧板和所述安装座的中部上。
9、优选的,所述驱动机构包括电机、蜗轮和蜗杆,所述电机连接所述蜗杆,所述蜗杆与所述蜗轮啮合,所述蜗轮的转轴两端分别贯穿所述u型缺口与所述长臂的下端固定。
10、优选的,所述夹紧机构包括安装座、滑座、导向杆和伸缩杆,所述安装座通过所述导向杆与所述滑座的中孔滑动设置,所述安装座位于所述槽型凸轮与所述滑座之间,所述滑座的四角上铰接有四个所述柔性机械指,所述安装座的四角通过所述伸缩杆与所述柔性机械指的外底角铰接。
11、优选的,所述滑座的两端通过连接板与所述槽型凸轮固定连接,所述连接板贯穿所述安装座。
12、优选的,所述柔性机械指包括指座和柔性指,所述指座上设置有等腰三角形的柔性指,所述柔性指的内部设置有条形镂空。
13、本发明相对于现有技术取得了以下技术效果:
14、本发明将采摘动作集成在采摘机器人的末端执行器上,与传统的六轴机械臂相比,大幅度降低了机械臂控制难度,降低了采摘机器人整机的设计难度,更适合于棚架式梨园的果实采摘;使执行器实现夹紧与采摘动作,机构简单且成本低,便于操控,提高采摘效率。
技术特征:
1.一种采摘机器人末端执行器,其特征在于:包括柔性机械指、夹紧机构、折枝机构和转动机构,所述转动机构用于连接采摘机器人,所述转动机构上转动连接有所述折枝机构,所述折枝机构上设置有所述夹紧机构,所述夹紧机构上连接有所述柔性机械指,所述夹紧机构能够使所述柔性机械指张开或者夹紧,所述柔性机械指用于抓取果实。
2.根据权利要求1所述的采摘机器人末端执行器,其特征在于:所述转动机构包括转动电机、电机座和轴筒,所述转动电机设置于所述电机座上,所述转动电机的转轴通过所述轴筒与所述折枝机构的支架连接。
3.根据权利要求2所述的采摘机器人末端执行器,其特征在于:所述电机座上设置有机壳,所述转动电机设置于所述机壳内,所述轴筒与所述电机座之间设置有一支撑环,所述支撑环内设置有一止推轴承。
4.根据权利要求1所述的采摘机器人末端执行器,其特征在于:所述折枝机构包括支架、槽型凸轮、连杆机构和驱动机构,所述支架为l型支架,所述支架的底板与所述转动机构连接、侧板上设置有一u型缺口,所述u型缺口上设置有所述驱动机构,所述驱动机构连接所述连杆机构,所述夹紧机构通过所述连杆机构与所述槽型凸轮连接于所述支架上,所述槽型凸轮与所述夹紧机构的滑座固定连接,所述连杆机构能够使所述槽型凸轮翻转至少15°。
5.根据权利要求4所述的采摘机器人末端执行器,其特征在于:所述槽型凸轮的下端设置有一异形槽,所述异形槽内设置有一轮轴,所述轮轴上套设有滚轮,所述滚轮位于所述异形槽内,所述轮轴的两端与所述连杆机构铰接。
6.根据权利要求5所述的采摘机器人末端执行器,其特征在于:所述连杆机构包括摆动臂和驱动臂,所述摆动臂和所述驱动臂分别对称设置于所述槽型凸轮的两侧,所述摆动臂包括摆臂和支撑臂,所述摆臂的两端分别铰接于所述l型支架的底板和所述夹紧机构的安装座上,所述支撑臂的一端铰接于所述支撑臂的端部铰接轴上、另一端与所述轮轴铰接,所述驱动臂包括长臂和短臂,所述短臂的两端分别铰接于所述长臂的中部和所述轮轴上,所述长臂的两端分别铰接于所述l型支架的侧板和所述安装座的中部上。
7.根据权利要求6所述的采摘机器人末端执行器,其特征在于:所述驱动机构包括电机、蜗轮和蜗杆,所述电机连接所述蜗杆,所述蜗杆与所述蜗轮啮合,所述蜗轮的转轴两端分别贯穿所述u型缺口与所述长臂的下端固定。
8.根据权利要求4所述的采摘机器人末端执行器,其特征在于:所述夹紧机构包括安装座、滑座、导向杆和伸缩杆,所述安装座通过所述导向杆与所述滑座的中孔滑动设置,所述安装座位于所述槽型凸轮与所述滑座之间,所述滑座的四角上铰接有四个所述柔性机械指,所述安装座的四角通过所述伸缩杆与所述柔性机械指的外底角铰接。
9.根据权利要求8所述的采摘机器人末端执行器,其特征在于:所述滑座的两端通过连接板与所述槽型凸轮固定连接,所述连接板贯穿所述安装座。
10.根据权利要求1所述的采摘机器人末端执行器,其特征在于:所述柔性机械指包括指座和柔性指,所述指座上设置有等腰三角形的柔性指,所述柔性指的内部设置有条形镂空。
技术总结
本发明公开了一种采摘机器人末端执行器,包括柔性机械指、夹紧机构、折枝机构和转动机构,转动机构用于连接采摘机器人,转动机构上转动连接有折枝机构,折枝机构上设置有夹紧机构,夹紧机构上连接有柔性机械指,夹紧机构能够使柔性机械指张开或者夹紧,柔性机械指用于抓取果实。本发明将采摘动作集成在采摘机器人的末端执行器上,与传统的六轴机械臂相比,大幅度降低了机械臂控制难度,降低了采摘机器人整机的设计难度,更适合于棚架式梨园的果实采摘;使执行器实现夹紧与采摘动作,机构简单且成本低,便于操控,提高采摘效率。
技术研发人员:叶云翔,俞国红,薛向磊,郑航,于健麟,项伟涛
受保护的技术使用者:浙江省农业科学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!