一种基于机器视觉的智能激光除草装置及除草方法
本发明涉及农田除草领域,具体涉及一种激光除草装置及方法领域。
背景技术:
1、在农作物出苗时期,由于此时农作物植株较小,未形成致密冠层,杂草具有较强的生态竞争力,导致农作物生长发育受阻,植株瘦弱,结实率降低;同时,田间杂草可作为田间致病菌和害虫的宿主,导致病虫害防治难度加大,严重影响作物产量。在草害一般的年份,会造成减产10%—20%,在严重时,甚至可减产五成。
2、当前,世界上主要的除草手段有人工除草、化学除草、机械除草、生物技术除草、物理因子除草和热电力除草等,目前使用较多的除草手段是人工除草、机械除草和化学除草。
3、人工除草除草效果较好,对农田目标作物伤害较小,但是需要大量的劳动力。化学除草的时间限制较少,同时对于苗间杂草有很好的除草效果,但化学除草剂的筛选作用会使得杂草产生抗药性;化学除草剂的滥用更会造成严重的污染,对生态环境造成严重破坏。
4、机械除草的劳动强度较低,同时具有较高的除草效率,绿色环保,同时机械除草机在除草的同时还能疏松土壤,增强土壤渗透性,改善土壤结构。但传统机械除草设备仍存在较多问题:一方面,对除草时间和作物种植方式有较大限制,对作物的种植间距有较大要求,且较难清除苗间杂草,也不适于间作、套作或密植条件;另一方面,在根系脆弱的幼苗时期,传统的除草机械可能会造成幼苗误伤,降低幼苗存活率,提高生产成本和作业时间。
技术实现思路
1、本发明的主要目的在于克服上述除草方法的种种缺陷,降低杂草危害,提出一种基于机器视觉的智能激光除草装置,实现田间杂草的精准快速清除。
2、本发明的另一目的,在于提出一种基于机器视觉的智能激光除草方法。
3、为了实现上述主要目的,本发明采用的技术方案是:
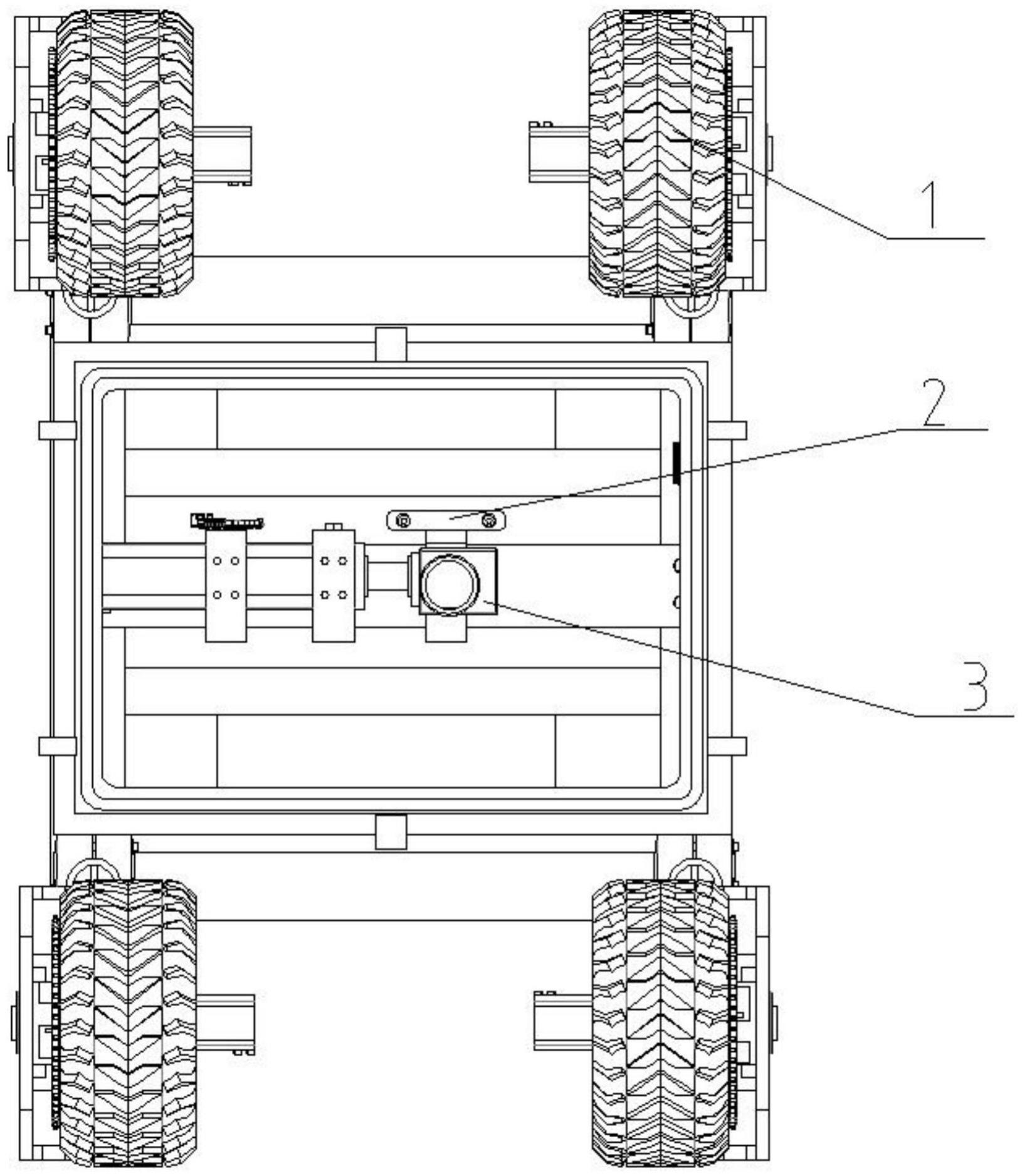
4、一种基于机器视觉的智能激光除草装置,包括支撑辅助单元、杂草识别单元和杂草清除单元。
5、进一步的,所述支撑辅助单元包括行走装置、中间横梁、车顶防尘盖、遮光防尘围板、led补光带固定支架、高透玻璃、电池与激光器固定支架、电池和高透玻璃固定片,所述行走装置为四轮独立电驱动底盘,根据作物行距自由调节轮距大小,所述中间横梁通过螺栓固定于行走小车底盘下表面,所述电池与激光器固定支架固定于小车底盘上表面,车顶防尘盖覆盖于行走小车底盘上表面四周,所述遮光防尘围板为铝合金材质,安装于行走小车底盘下表面四周,且在光纤激光器一侧开有向下的通风口,所述led补光带固定支架焊接于遮光防尘围板下端,led补光带固定支架下表面距遮光防尘围板最下端1厘米,高透玻璃厚度0.5厘米,通过高透玻璃固定片安装于遮光防尘围板的最下方,上表面与遮光防尘围板最下端平齐,高透玻璃、车顶防尘盖、遮光防尘围板共同构成半封闭空间,为杂草识别单元、杂草清除单元提供较为良好的运行环境,所述电池安装于车顶防尘盖内的电池与激光器固定支架上。
6、杂草识别单元包括led补光带、嵌入式人工智能超级计算平台、双目相机、相机固定螺钉、安装支架夹紧螺栓及双目相机安装支架,所述led补光带面向地面放置,厚度1厘米,粘贴在led补光带固定支架上,补光带下表面恰好与高透玻璃上表面接触,降低光的反射,所述嵌入式人工智能超级计算平台通过螺钉固定于遮光防尘围板上,所述双目相机镜头面向地面放置,用相机固定螺钉固定在双目相机安装支架上,双目相机安装支架安装于中间横梁上,调节双目相机安装支架顶部的安装支架夹紧螺栓,可以控制双目相机安装支架在中间横梁上的位置。
7、杂草清除单元包括光纤激光器、振镜、第一光路固定块、第二光路固定块、光路固定螺栓、光路固定块夹紧螺栓、振镜控制卡和激光光路连接器,所述光纤激光器安装于电池与激光器固定支架上,激光束通过光纤和激光光路连接器传入振镜中,激光光路连接器通过光路固定螺栓和第一、第二光路固定块连接在一起,第一、第二光路固定块夹在中间横梁双上,调节第一、第二光路固定块顶部的光路固定块夹紧螺栓,可以控制第一、第二光固定块在中间横梁上的位置,所述振镜与激光光路连接器固定在一起,且面向地面放置,所述振镜控制卡安装于第一光路固定块侧面,通过螺钉固定。
8、一种基于深度学习和双目立体视觉的激光除草装置,光纤激光器激光功率为100瓦,振镜最小离地间隙为400毫米。
9、为了实现上述另一目的,本发明采用的技术方案是:
10、本发明基于机器视觉的智能激光除草方法,包括下述步骤:
11、(1)行走单元定速行驶,双目相机采集田间图像数据,将数据通过usb接口上传至嵌入式人工智能超级计算平台;
12、(2)根据预先训练好的杂草识别模型,嵌入式人工智能超级计算平台对采集到的每帧图像进行目标识别,识别出杂草后,依次记录杂草中心点在图像坐标系下的二维坐标(x,y);
13、(3)嵌入式人工智能超级计算平台将双目相机采集到的图像转化为灰度图并进行直方图均衡,进一步消除图像畸变,进行立体校正,得到视差图,根据视差图和二维坐标(x,y),得到目标杂草中心点在相机坐标系下的三维坐标(x0,y0,z0),确定杂草所在的方形区域,在上述方形区域内采用基于色彩的杂草分割,生成杂草边界坐标,确定杂草所在区域;
14、(4)将杂草中心点的三维坐标和杂草边界坐标通过串口发送至激光振镜控制卡,激光振镜控制卡根据目标杂草中心点的z轴坐标z0调整整体振镜高度,调整激光焦点,激光振镜控制卡控制振镜偏转,使激光束以直线插补的路径扫过杂草所在区域,实现杂草的激光清除。
15、本发明的有益效果:
16、1、本发明实现了深度学习和双目视觉的有机结合,同时将图像处理运算模块集成到了嵌入式人工智能超级计算平台,在识别田间杂草的基础上,做到了杂草中心点、杂草边界坐标的的精准定位,实现了“发现—定位—清除”的除草流程智能化。
17、2、本发明采用振镜控制下激光作为除草手段,激光的自适应扫描保证了对杂草的范围覆盖,激光除草具有除草效率高、耗费时间短的优点,而且激光除草对环境和农田作物无任何潜在威胁,提升了除草安全性。
18、3、激光除草设备除前期购买设备的费用外,后续只需较少的维护费用,无需大量耗材,成本简单可控。
技术特征:
1.一种基于机器视觉的智能激光除草装置及除草方法,其特征在于,包括支撑辅助单元(1)、杂草识别单元(2)和杂草清除单元(3)。
2.根据权利要求1所述的支撑辅助单元(1),其特征在于,包括行走装置(1-1)、中间横梁(1-2)、车顶防尘盖(1-3)、遮光防尘围板(1-4)、led补光带固定支架(1-5)、高透玻璃(1-6)、电池与激光器固定支架(1-7)、电池(1-8)和高透玻璃固定片(1-9),所述行走装置为四轮独立电驱动底盘,根据作物行距自由调节轮距大小,所述中间横梁通过螺栓固定于行走小车底盘下表面,所述电池与激光器固定支架固定于小车底盘上表面,车顶防尘盖覆盖于行走小车底盘上表面四周,所述遮光防尘围板为铝合金材质,安装于行走小车底盘下表面四周,且在光纤激光器一侧开有向下的通风口,所述led补光带固定支架焊接于遮光防尘围板下端,led补光带固定支架下表面距遮光防尘围板最下端1厘米,高透玻璃厚度0.5厘米,通过高透玻璃固定片安装于遮光防尘围板的最下方,上表面与遮光防尘围板最下端平齐,高透玻璃、车顶防尘盖、遮光防尘围板共同构成半封闭空间,为杂草识别单元、杂草清除单元提供较为良好的运行环境,所述电池安装于车顶防尘盖内的电池与激光器固定支架上。
3.根据权利要求1所述的杂草识别单元(2),其特征在于,包括led补光带(2-1)、嵌入式人工智能超级计算平台(2-2)、双目相机(2-3)、相机固定螺钉(2-4)、安装支架夹紧螺栓(2-5)及双目相机安装支架(2-6),所述led补光带面向地面放置,厚度1厘米,粘贴在led补光带固定支架上,补光带下表面恰好与高透玻璃上表面接触,降低光的反射,所述嵌入式人工智能超级计算平台通过螺钉固定于遮光防尘围板上,所述双目相机镜头面向地面放置,用相机固定螺钉固定在双目相机安装支架上,双目相机安装支架安装于中间横梁上,调节双目相机安装支架顶部的安装支架夹紧螺栓,可以控制双目相机安装支架在中间横梁上的位置。
4.根据权利要求1所述的杂草清除单元(3),其特征在于,包括光纤激光器(3-1)、振镜(3-2)、第一光路固定块(3-3)、第二光路固定块(3-4)、光路固定螺栓(3-5)、光路固定块夹紧螺栓(3-6)、振镜控制卡(3-7)和激光光路连接器(3-8),所述光纤激光器安装于电池与激光器固定支架上,激光束通过光纤和激光光路连接器传入振镜中,激光光路连接器通过光路固定螺栓和第一、第二光路固定块连接在一起,第一、第二光路固定块夹在中间横梁双上,调节第一、第二光路固定块顶部的光路固定块夹紧螺栓,可以控制第一、第二光固定块在中间横梁上的位置,所述振镜与激光光路连接器固定在一起,且面向地面放置,所述振镜控制卡安装于第一光路固定块侧面,通过螺钉固定。
5.根据权利要求1所述的基于机器视觉的智能激光除草装置,其特征在于,光纤激光器激光功率为100瓦,振镜最小离地间隙为400毫米。
6.根据权利要求1所述的基于机器视觉的智能激光除草方法,其特征在于,包括下述步骤:
技术总结
本发明公开了一种基于机器视觉的智能激光除草装置及除草方法,此除草装置包括支撑辅助单元、杂草识别单元和杂草清除单元三部分;本发明通过深度学习、双目立体视觉技术和激光技术的有机结合,形成基于深度学习和双目立体视觉的激光除草设备,使用高性能摄像头和嵌入式人工智能超级计算平台完成杂草中心点的精确定位和杂草边界框长度和宽度测量,采用激光振镜进行杂草区域扫描清除。可实现在作物种植苗期的精确除草作业,同时尽量降低除草作业对作物幼苗的影响,提高种植效率,有效增加产量;同时大幅度减少化学除草剂使用量,有效促进了绿色农业的发展。
技术研发人员:吴雪峰,王文昊,洪佳威,夏纪准,颜士凯,苏晨涛,张国豪
受保护的技术使用者:哈尔滨理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!