一种轮胎式的喷药机器人
本发明涉及喷药机器人,具体为一种轮胎式的喷药机器人。
背景技术:
1、在各种果树种植以及取得果实产品的过程中,自动化正逐步体现出其重要性。尤其是在果树种植中农药喷洒这一方面,通过自动化作业,不但可以减少人们的劳动强度,而且机器做工还可以克服地形、天气、植物疏密状态等一些不利因素的影响。
2、但是在果园地面上,还存在的大量的杂草,在果园里,常见的杂草一般有29个科,80多个种,单一采用农药进行喷洒,并不能有效的对杂草进行杀除,尤其是在果树树干附近的杂草,上方多会有虫卵等残留,不及时清除,容易影响果树的生长。
3、如果采用传统的割草机,不易环绕果树进行除草,且容易对果树造成伤害,因此提出一种轮胎式的喷药机器人。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种轮胎式的喷药机器人,解决了上述所提出的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:一种轮胎式的喷药机器人,包括固定框;
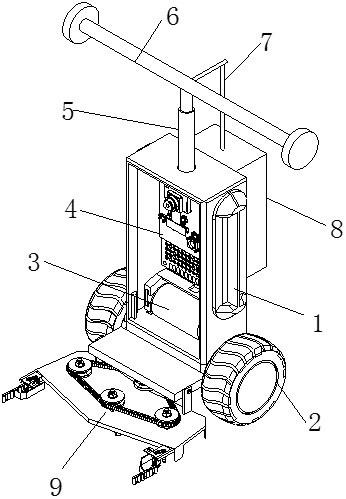
5、所述固定框的底部左右两侧相对设置有转轮,所述固定框的内部下端安装有储能电池,所述固定框的内部设置有控制面板,所述控制面板可以为模块,具体型号根据实际进行设计或定制,在此不作限定;
6、所述固定框的顶部嵌入安装有电动推杆,所述固定框的顶部固定有喷头,所述喷头可以为喷雾喷头,也可以为喷淋喷头,在此不作限定,所述喷头采用导管与储存框的顶部相连接,所述储存框的内部下设置有水泵,导管与水泵相连接,便于将药液进行输送,所述储存框的左端设置有进液管,便于对药液进行天机,所述固定框的前端安装有轮胎清草装置;
7、所述轮胎清草装置包括支撑架、连接架、主动轮、传动带、从动轮、割刀、转向调节机构、伺服电机,所述支撑架的后端与固定框相固定,所述支撑架与连接架的顶部为一体结构,所述支撑架的底部螺栓连接有伺服电机,所述伺服电机输出端与主动轮传动连接。
8、优选的,所述从动轮共设置有三组,且从动轮的底部均搭配设置有割刀,割刀随着从动轮的中部同步转动,所述主动轮采用传动带分别与三组所述从动轮传动配合,所述主动轮与三组所述从动轮相互构成平行四边形结构,便于使三组割刀进行同步转动,增加割草的范围和割草的效率。
9、优选的,所述转向调节机构共设置有两组,且安装于连接架的前端左右两侧,所述转向调节机构包括横板、驱动电机一、摆动机构、支撑座、转动机构,所述横板与连接架相固定,所述横板与驱动电机一的顶部螺栓连接,所述驱动电机一与摆动机构的后端相连接,所述摆动机构安装于横板的顶部,所述横板与支撑座的顶部相固定,所述支撑座的底部安装有转动机构。
10、优选的,所述摆动机构包括皮带轮一、传动带一、皮带轮二、摆动块一、连杆、摆动块二、护板、滑轮组,所述皮带轮一与驱动电机一的输出端传动连接,所述皮带轮一采用传动带一与皮带轮二的内壁啮合传动,所述皮带轮二与转动机构的顶部相连接,所述摆动块一随着皮带轮二的中部同步转动,所述连杆的左右两侧相对设置有摆动块二和摆动块一,所述连杆的左右两侧分别与摆动块二和摆动块一活动连接,所述护板的顶部后端随着摆动块二同步转动,所述护板的右端设置有滑轮组,摆动块二和摆动块一的尺寸相同,且相互平行设置,便于带动护板进行摆动。
11、优选的,所述滑轮组包括承接座一、导向轮一、连接片、承接座二、导向轮二,所述承接座一的左端与护板相固定,所述承接座一与连接片的前端铰链连接,承接座二与连接片的后端铰链连接,所述承接座二的内侧设置有导向轮二。
12、优选的,所述导向轮一共设置有两组,且均嵌入安装于承接座一的内侧,所述承接座二共设置有两组,沿承接座一前后两侧相对设置,且均采用连接片相连接,所述承接座一和承接座二由两组相互平行的板构成,使得导向轮一和导向轮二平稳进行转动。
13、优选的,所述转动机构包括驱动电机二、皮带轮三、传动带二、皮带轮四、锥齿轮一、锥齿轮二、皮带轮五、传动带三、皮带轮六、活动轮、承接座,所述驱动电机二的顶部与支撑座相固定,所述驱动电机二与皮带轮三的中部传动连接,所述皮带轮三采用传动带二与皮带轮四的内壁啮合传动,所述锥齿轮一随着皮带轮四的中部同步转动,所述锥齿轮二与皮带轮五的左端传动连接,所述皮带轮五采用传动带三与皮带轮六的内壁啮合传动,所述活动轮随着皮带轮六同步转动,且活动轮与承接座的内部活动连接。
14、优选的,所述锥齿轮一与锥齿轮二相互垂直设置,所述锥齿轮一与锥齿轮二的右端相啮合,锥齿轮二的左端与承接座活动连接,便于使锥齿轮二平稳转动。
15、优选的,所述承接座的顶部设置有转动座,所述锥齿轮一与转动座的内侧活动连接,所述转动座与承接座的顶部相固定,且转动座随着皮带轮二的底部同步转动。
16、优选的,所述电动推杆、伺服电机、驱动电机一、驱动电机二均与控制面板电连接。
17、(三)有益效果
18、本发明提供了一种轮胎式的喷药机器人。具备以下有益效果:通过设置了轮胎清草装置,伺服电机带动主动轮进行转动,使主动轮通过传动带带动三组从动轮进行同步转动,使割刀对杂草进行切割,同时述转向调节机构带动上端的活动轮进行倾斜,使与果树相邻的一端滑轮组与果树树干先贴合,对机器人进行导向,同时不会使割刀伤到果树,随后转动机构驱动活动轮进行转动,带动喷药机器人呈环形状运动,对果树底部杂草进行环形切割,进行除草工作。
19、本发明提供了一种轮胎式的喷药机器人。具备以下有益效果:通过设置了转向调节机构,驱动电机一带动皮带轮一进行转动,使皮带轮一通过传动带带动皮带轮二同步转动,皮带轮二带动转动座与承接座同步转动,从而使活动轮产生倾斜,同时皮带轮二上的摆动块一通过连杆带动摆动块二同步转动,从而使摆动块儿带动护板同步进行倾斜,能够对活动轮进行保护,免除杂草缠绕,同时使滑轮组与果树树干相贴合,便于进行导向。
20、本发明提供了一种轮胎式的喷药机器人。具备以下有益效果:通过设置了滑轮组,承接座一和承接座二上的导向轮一和导向轮二与树干侧壁相接触,且承接座一和承接座二可以通过连接片调整之间的夹角,方便应对不同直径的果树,在割草时,导向轮一和导向轮二与果树接触转动,减小环形割草时,机器人与果树之间的摩擦力,同时能够对果树树干进行保护。
技术特征:
1.一种轮胎式的喷药机器人,其特征在于:包括固定框(1);
2.根据权利要求1所述的一种轮胎式的喷药机器人,其特征在于:所述从动轮(95)共设置有三组,且从动轮(95)的底部均搭配设置有割刀(96),割刀(96)随着从动轮(95)的中部同步转动,所述主动轮(93)采用传动带(94)分别与三组所述从动轮(95)传动配合,所述主动轮(93)与三组所述从动轮(95)相互构成平行四边形结构。
3.根据权利要求1所述的一种轮胎式的喷药机器人,其特征在于:所述转向调节机构(97)共设置有两组,且安装于连接架(92)的前端左右两侧,所述转向调节机构(97)包括横板(971)、驱动电机一(972)、摆动机构(973)、支撑座(974)、转动机构(975),所述横板(971)与连接架(92)相固定,所述横板(971)与驱动电机一(972)的顶部螺栓连接,所述驱动电机一(972)与摆动机构(973)的后端相连接,所述摆动机构(973)安装于横板(971)的顶部,所述横板(971)与支撑座(974)的顶部相固定,所述支撑座(974)的底部安装有转动机构(975)。
4.根据权利要求3所述的一种轮胎式的喷药机器人,其特征在于:所述摆动机构(973)包括皮带轮一(9731)、传动带一(9732)、皮带轮二(9733)、摆动块一(9734)、连杆(9735)、摆动块二(9736)、护板(9737)、滑轮组(9738),所述皮带轮一(9731)与驱动电机一(972)的输出端传动连接,所述皮带轮一(9731)采用传动带一(9732)与皮带轮二(9733)的内壁啮合传动,所述皮带轮二(9733)与转动机构(975)的顶部相连接,所述摆动块一(9734)随着皮带轮二(9733)的中部同步转动,所述连杆(9735)的左右两侧相对设置有摆动块二(9736)和摆动块一(9734),所述护板(9737)的顶部后端随着摆动块二(9736)同步转动,所述护板(9737)的右端设置有滑轮组(9738)。
5.根据权利要求4所述的一种轮胎式的喷药机器人,其特征在于:所述滑轮组(9738)包括承接座一(973a)、导向轮一(973b)、连接片(973c)、承接座二(973d)、导向轮二(973e),所述承接座一(973a)的左端与护板(9737)相固定,所述承接座一(973a)与连接片(973c)的前端铰链连接,承接座二(973d)与连接片(973c)的后端铰链连接,所述承接座二(973d)的内侧设置有导向轮二(973e)。
6.根据权利要求5所述的一种轮胎式的喷药机器人,其特征在于:所述导向轮一(973b)共设置有两组,且均嵌入安装于承接座一(973a)的内侧,所述承接座二(973d)共设置有两组,沿承接座一(973a)前后两侧相对设置,且均采用连接片(973c)相连接,所述承接座一(973a)和承接座二(973d)由两组相互平行的板构成。
7.根据权利要求3所述的一种轮胎式的喷药机器人,其特征在于:所述转动机构(975)包括驱动电机二(97a)、皮带轮三(97b)、传动带二(97c)、皮带轮四(97d)、锥齿轮一(97e)、锥齿轮二(97f)、皮带轮五(97g)、传动带三(97h)、皮带轮六(97i)、活动轮(97j)、承接座(97k),所述驱动电机二(97a)的顶部与支撑座(974)相固定,所述驱动电机二(97a)与皮带轮三(97b)的中部传动连接,所述皮带轮三(97b)采用传动带二(97c)与皮带轮四(97d)的内壁啮合传动,所述锥齿轮一(97e)随着皮带轮四(97d)的中部同步转动,所述锥齿轮二(97f)与皮带轮五(97g)的左端传动连接,所述皮带轮五(97g)采用传动带三(97h)与皮带轮六(97i)的内壁啮合传动,所述活动轮(97j)随着皮带轮六(97i)同步转动,且活动轮(97j)与承接座(97k)的内部活动连接。
8.根据权利要求7所述的一种轮胎式的喷药机器人,其特征在于:所述锥齿轮一(97e)与锥齿轮二(97f)相互垂直设置,所述锥齿轮一(97e)与锥齿轮二(97f)的右端相啮合,锥齿轮二(97f)的左端与承接座(97k)活动连接,便于使锥齿轮二(97f)平稳转动。
9.根据权利要求7所述的一种轮胎式的喷药机器人,其特征在于:所述承接座(97k)的顶部设置有转动座(97k1),所述锥齿轮一(97e)与转动座(97k1)的内侧活动连接。
技术总结
本发明公开了一种轮胎式的喷药机器人,包括固定框;所述固定框的底部左右两侧相对设置有转轮,所述固定框的内部下端安装有储能电池。通过设置了轮胎清草装置,伺服电机带动主动轮进行转动,使主动轮通过传动带带动三组从动轮进行同步转动,使割刀对杂草进行切割,同时述转向调节机构带动上端的活动轮进行倾斜,使与果树相邻的一端滑轮组与果树树干先贴合,对机器人进行导向,同时不会使割刀伤到果树,随后转动机构驱动活动轮进行转动,带动喷药机器人呈环形状运动,对果树底部杂草进行环形切割,进行除草工作。
技术研发人员:刘志平,周怀平,解文艳,杨振兴,贺丽燕
受保护的技术使用者:山西农业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!